 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeUnsupervised Urban Land Use Mapping with Street View Contrastive Clustering and a Geographical Prior
Apr 24, 2025Urban land use classification and mapping are critical for urban planning, resource management, and environmental monitoring. Existing remote sensing techniques often lack precision in complex urban environments due to the absence of ground-level details. Unlike aerial perspectives, street view images provide a ground-level view that captures more human and social activities relevant to land use in complex urban scenes. Existing street view-based methods primarily rely on supervised classification, which is challenged by the scarcity of high-quality labeled data and the difficulty of generalizing across diverse urban landscapes. This study introduces an unsupervised contrastive clustering model for street view images with a built-in geographical prior, to enhance clustering performance. When combined with a simple visual assignment of the clusters, our approach offers a flexible and customizable solution to land use mapping, tailored to the specific needs of urban planners. We experimentally show that our method can generate land use maps from geotagged street view image datasets of two cities. As our methodology relies on the universal spatial coherence of geospatial data ("Tobler's law"), it can be adapted to various settings where street view images are available, to enable scalable, unsupervised land use mapping and updating. The code will be available at https://github.com/lin102/CCGP.
On the potential of Optimal Transport in Geospatial Data Science
Oct 15, 2024Prediction problems in geographic information science and transportation are frequently motivated by the possibility to enhance operational efficiency. Examples range from predicting car sharing demand for optimizing relocation to forecasting traffic congestion for navigation purposes. However, conventional accuracy metrics do not account for the spatial distribution of predictions errors, despite its relevance for operations. We put forward Optimal Transport (OT) as a spatial evaluation metric and loss function. The proposed OT metric assesses the utility of spatial prediction models in terms of the relocation costs caused by prediction errors. In experiments on real and synthetic data, we demonstrate that 1) the spatial distribution of the prediction errors is relevant in many applications and can be translated to real-world costs, 2) in contrast to other metrics, OT reflects these spatial costs, and 3) OT metrics improve comparability across spatial and temporal scales. Finally, we advocate for leveraging OT as a loss function in neural networks to improve the spatial correctness of predictions. This approach not only aligns evaluation in GeoAI with operational considerations, but also signifies a step forward in refining predictions within geospatial applications. To facilitate the adoption of OT in GIS, we provide code and tutorials at https://github.com/mie-lab/geospatialOT.
Context-aware knowledge graph framework for traffic speed forecasting using graph neural network
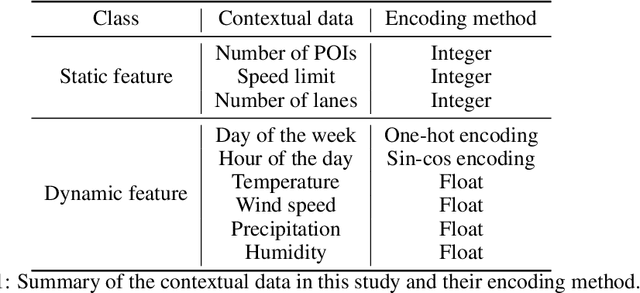
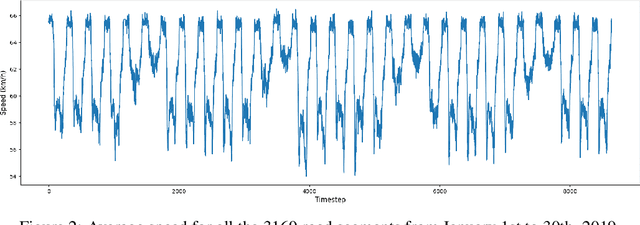
Jul 25, 2024Human mobility is intricately influenced by urban contexts spatially and temporally, constituting essential domain knowledge in understanding traffic systems. While existing traffic forecasting models primarily rely on raw traffic data and advanced deep learning techniques, incorporating contextual information remains underexplored due to the lack of effective integration frameworks and the complexity of urban contexts. This study proposes a novel context-aware knowledge graph (CKG) framework to enhance traffic speed forecasting by effectively modeling spatial and temporal contexts. Employing a relation-dependent integration strategy, the framework generates context-aware representations from the spatial and temporal units of CKG to capture spatio-temporal dependencies of urban contexts. A CKG-GNN model, combining the CKG, dual-view multi-head self-attention (MHSA), and graph neural network (GNN), is then designed to predict traffic speed using these context-aware representations. Our experiments demonstrate that CKG's configuration significantly influences embedding performance, with ComplEx and KG2E emerging as optimal for embedding spatial and temporal units, respectively. The CKG-GNN model surpasses benchmark models, achieving an average MAE of $3.46\pm0.01$ and a MAPE of $14.76\pm0.09\%$ for traffic speed predictions from 10 to 120 minutes. The dual-view MHSA analysis reveals the crucial role of relation-dependent features from the context-based view and the model's ability to prioritize recent time slots in prediction from the sequence-based view. The CKG framework's model-agnostic nature suggests its potential applicability in various applications of intelligent transportation systems. Overall, this study underscores the importance of incorporating domain-specific contexts into traffic forecasting and merging context-aware knowledge graphs with neural networks to enhance accuracy.
Counterfactual Explanations for Deep Learning-Based Traffic Forecasting
May 01, 2024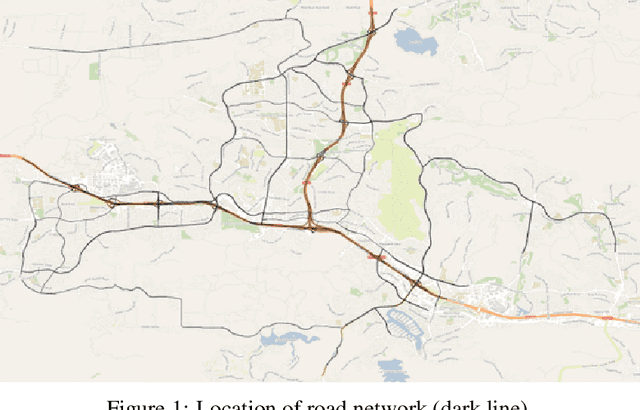

Deep learning models are widely used in traffic forecasting and have achieved state-of-the-art prediction accuracy. However, the black-box nature of those models makes the results difficult to interpret by users. This study aims to leverage an Explainable AI approach, counterfactual explanations, to enhance the explainability and usability of deep learning-based traffic forecasting models. Specifically, the goal is to elucidate relationships between various input contextual features and their corresponding predictions. We present a comprehensive framework that generates counterfactual explanations for traffic forecasting and provides usable insights through the proposed scenario-driven counterfactual explanations. The study first implements a deep learning model to predict traffic speed based on historical traffic data and contextual variables. Counterfactual explanations are then used to illuminate how alterations in these input variables affect predicted outcomes, thereby enhancing the transparency of the deep learning model. We investigated the impact of contextual features on traffic speed prediction under varying spatial and temporal conditions. The scenario-driven counterfactual explanations integrate two types of user-defined constraints, directional and weighting constraints, to tailor the search for counterfactual explanations to specific use cases. These tailored explanations benefit machine learning practitioners who aim to understand the model's learning mechanisms and domain experts who seek insights for real-world applications. The results showcase the effectiveness of counterfactual explanations in revealing traffic patterns learned by deep learning models, showing its potential for interpreting black-box deep learning models used for spatiotemporal predictions in general.
Revealing behavioral impact on mobility prediction networks through causal interventions
Nov 20, 2023Deep neural networks are increasingly utilized in mobility prediction tasks, yet their intricate internal workings pose challenges for interpretability, especially in comprehending how various aspects of mobility behavior affect predictions. In this study, we introduce a causal intervention framework to assess the impact of mobility-related factors on neural networks designed for next location prediction -- a task focusing on predicting the immediate next location of an individual. To achieve this, we employ individual mobility models to generate synthetic location visit sequences and control behavior dynamics by intervening in their data generation process. We evaluate the interventional location sequences using mobility metrics and input them into well-trained networks to analyze performance variations. The results demonstrate the effectiveness in producing location sequences with distinct mobility behaviors, thus facilitating the simulation of diverse spatial and temporal changes. These changes result in performance fluctuations in next location prediction networks, revealing impacts of critical mobility behavior factors, including sequential patterns in location transitions, proclivity for exploring new locations, and preferences in location choices at population and individual levels. The gained insights hold significant value for the real-world application of mobility prediction networks, and the framework is expected to promote the use of causal inference for enhancing the interpretability and robustness of neural networks in mobility applications.
Where you go is who you are -- A study on machine learning based semantic privacy attacks
Oct 26, 2023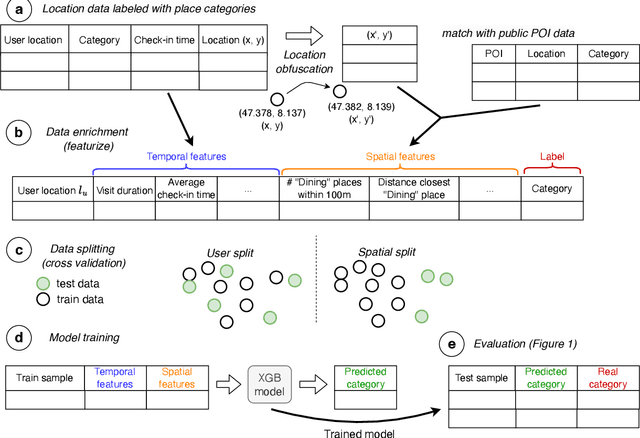
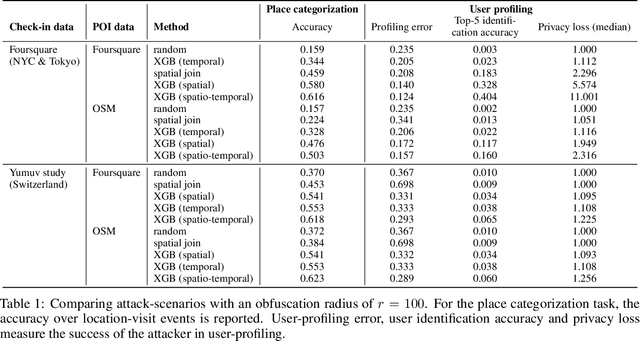
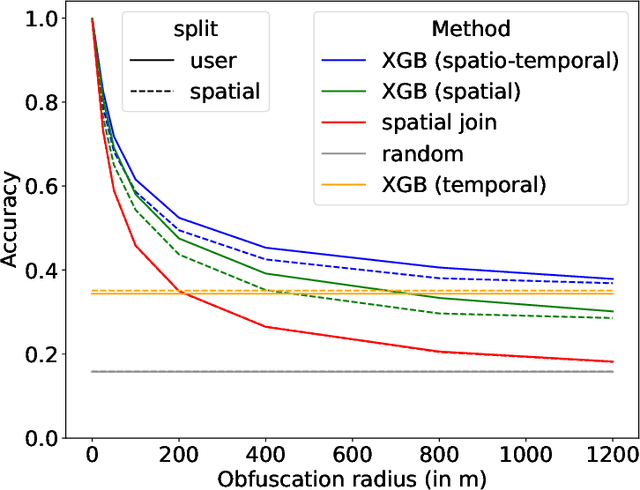
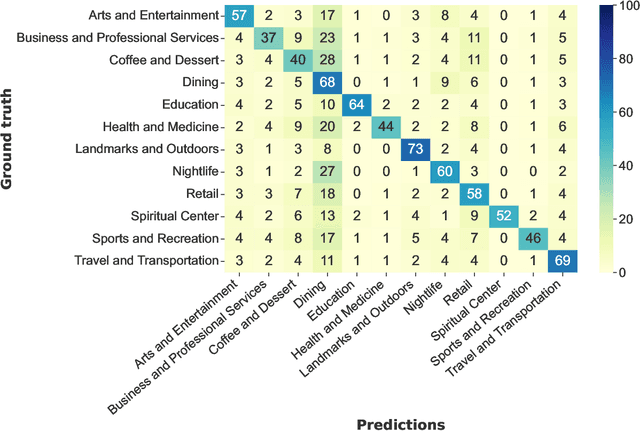
Concerns about data privacy are omnipresent, given the increasing usage of digital applications and their underlying business model that includes selling user data. Location data is particularly sensitive since they allow us to infer activity patterns and interests of users, e.g., by categorizing visited locations based on nearby points of interest (POI). On top of that, machine learning methods provide new powerful tools to interpret big data. In light of these considerations, we raise the following question: What is the actual risk that realistic, machine learning based privacy attacks can obtain meaningful semantic information from raw location data, subject to inaccuracies in the data? In response, we present a systematic analysis of two attack scenarios, namely location categorization and user profiling. Experiments on the Foursquare dataset and tracking data demonstrate the potential for abuse of high-quality spatial information, leading to a significant privacy loss even with location inaccuracy of up to 200m. With location obfuscation of more than 1 km, spatial information hardly adds any value, but a high privacy risk solely from temporal information remains. The availability of public context data such as POIs plays a key role in inference based on spatial information. Our findings point out the risks of ever-growing databases of tracking data and spatial context data, which policymakers should consider for privacy regulations, and which could guide individuals in their personal location protection measures.
Uncertainty Quantification for Image-based Traffic Prediction across Cities
Aug 11, 2023Despite the strong predictive performance of deep learning models for traffic prediction, their widespread deployment in real-world intelligent transportation systems has been restrained by a lack of interpretability. Uncertainty quantification (UQ) methods provide an approach to induce probabilistic reasoning, improve decision-making and enhance model deployment potential. To gain a comprehensive picture of the usefulness of existing UQ methods for traffic prediction and the relation between obtained uncertainties and city-wide traffic dynamics, we investigate their application to a large-scale image-based traffic dataset spanning multiple cities and time periods. We compare two epistemic and two aleatoric UQ methods on both temporal and spatio-temporal transfer tasks, and find that meaningful uncertainty estimates can be recovered. We further demonstrate how uncertainty estimates can be employed for unsupervised outlier detection on changes in city traffic dynamics. We find that our approach can capture both temporal and spatial effects on traffic behaviour in a representative case study for the city of Moscow. Our work presents a further step towards boosting uncertainty awareness in traffic prediction tasks, and aims to highlight the value contribution of UQ methods to a better understanding of city traffic dynamics.
Evaluating geospatial context information for travel mode detection
May 30, 2023Detecting travel modes from global navigation satellite system (GNSS) trajectories is essential for understanding individual travel behaviour and a prerequisite for achieving sustainable transport systems. While studies have acknowledged the benefits of incorporating geospatial context information into travel mode detection models, few have summarized context modelling approaches and analyzed the significance of these context features, hindering the development of an efficient model. Here, we identify context representations from related work and propose an analytical pipeline to assess the contribution of geospatial context information for travel mode detection based on a random forest model and the SHapley Additive exPlanation (SHAP) method. Through experiments on a large-scale GNSS tracking dataset, we report that features describing relationships with infrastructure networks, such as the distance to the railway or road network, significantly contribute to the model's prediction. Moreover, features related to the geospatial point entities help identify public transport travel, but most land-use and land-cover features barely contribute to the task. We finally reveal that geospatial contexts have distinct contributions in identifying different travel modes, providing insights into selecting appropriate context information and modelling approaches. The results from this study enhance our understanding of the relationship between movement and geospatial context and guide the implementation of effective and efficient transport mode detection models.
Spatially-Aware Car-Sharing Demand Prediction
Mar 25, 2023In recent years, car-sharing services have emerged as viable alternatives to private individual mobility, promising more sustainable and resource-efficient, but still comfortable transportation. Research on short-term prediction and optimization methods has improved operations and fleet control of car-sharing services; however, long-term projections and spatial analysis are sparse in the literature. We propose to analyze the average monthly demand in a station-based car-sharing service with spatially-aware learning algorithms that offer high predictive performance as well as interpretability. In particular, we compare the spatially-implicit Random Forest model with spatially-aware methods for predicting average monthly per-station demand. The study utilizes a rich set of socio-demographic, location-based (e.g., POIs), and car-sharing-specific features as input, extracted from a large proprietary car-sharing dataset and publicly available datasets. We show that the global Random Forest model with geo-coordinates as an input feature achieves the highest predictive performance with an R-squared score of 0.87, while local methods such as Geographically Weighted Regression perform almost on par and additionally yield exciting insights into the heterogeneous spatial distributions of factors influencing car-sharing behaviour. Additionally, our study offers effective as well as highly interpretable methods for diagnosing and planning the placement of car-sharing stations.
Context-aware multi-head self-attentional neural network model for next location prediction
Dec 04, 2022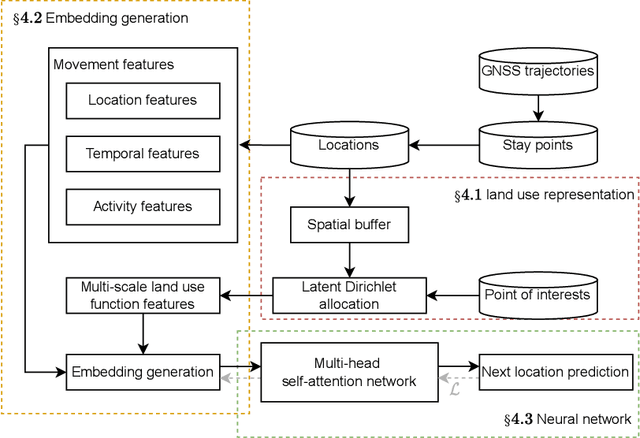
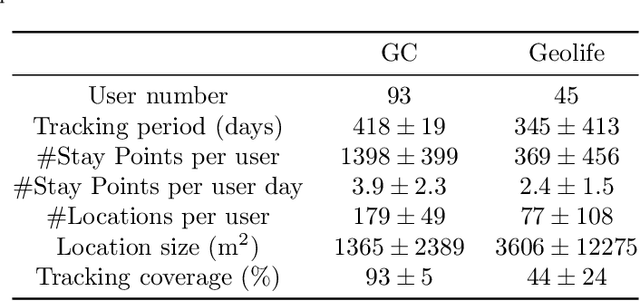
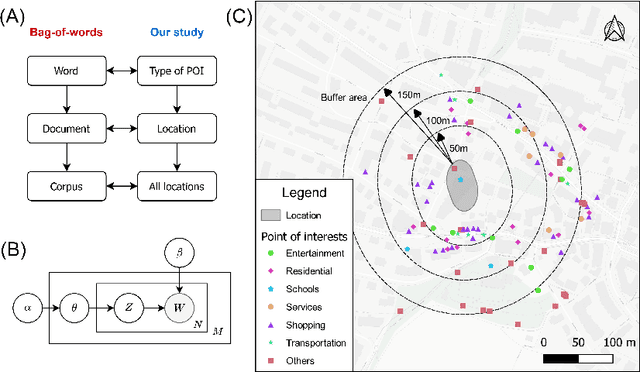
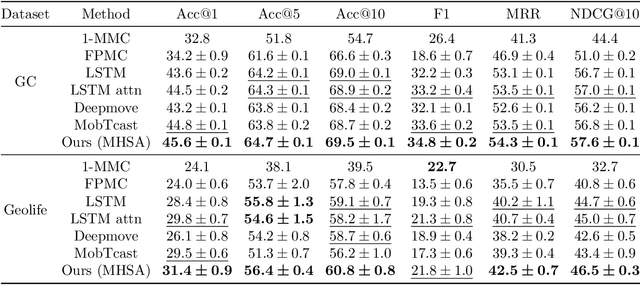
Accurate activity location prediction is a crucial component of many mobility applications and is particularly required to develop personalized, sustainable transportation systems. Despite the widespread adoption of deep learning models, next location prediction models lack a comprehensive discussion and integration of mobility-related spatio-temporal contexts. Here, we utilize a multi-head self-attentional (MHSA) neural network that learns location transition patterns from historical location visits, their visit time and activity duration, as well as their surrounding land use functions, to infer an individual's next location. Specifically, we adopt point-of-interest data and latent Dirichlet allocation for representing locations' land use contexts at multiple spatial scales, generate embedding vectors of the spatio-temporal features, and learn to predict the next location with an MHSA network. Through experiments on two large-scale GNSS tracking datasets, we demonstrate that the proposed model outperforms other state-of-the-art prediction models, and reveal the contribution of various spatio-temporal contexts to the model's performance. Moreover, we find that the model trained on population data achieves higher prediction performance with fewer parameters than individual-level models due to learning from collective movement patterns. We also reveal mobility conducted in the recent past and one week before has the largest influence on the current prediction, showing that learning from a subset of the historical mobility is sufficient to obtain an accurate location prediction result. We believe that the proposed model is vital for context-aware mobility prediction. The gained insights will help to understand location prediction models and promote their implementation for mobility applications.