 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSynthetic location trajectory generation using categorical diffusion models
Feb 19, 2024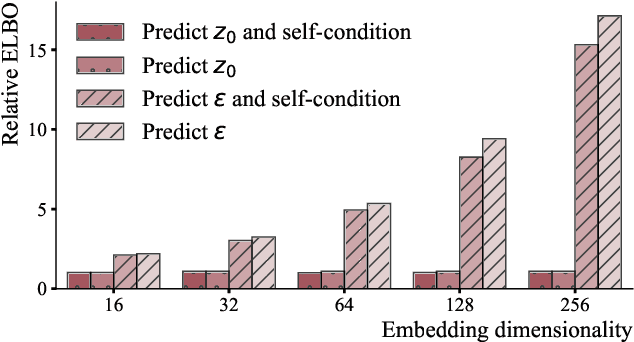
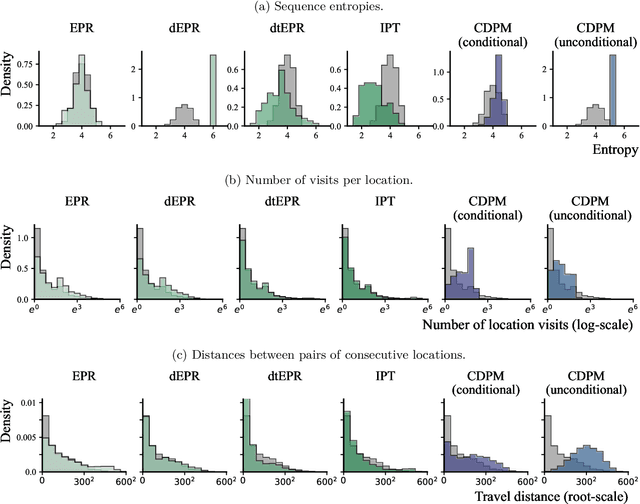
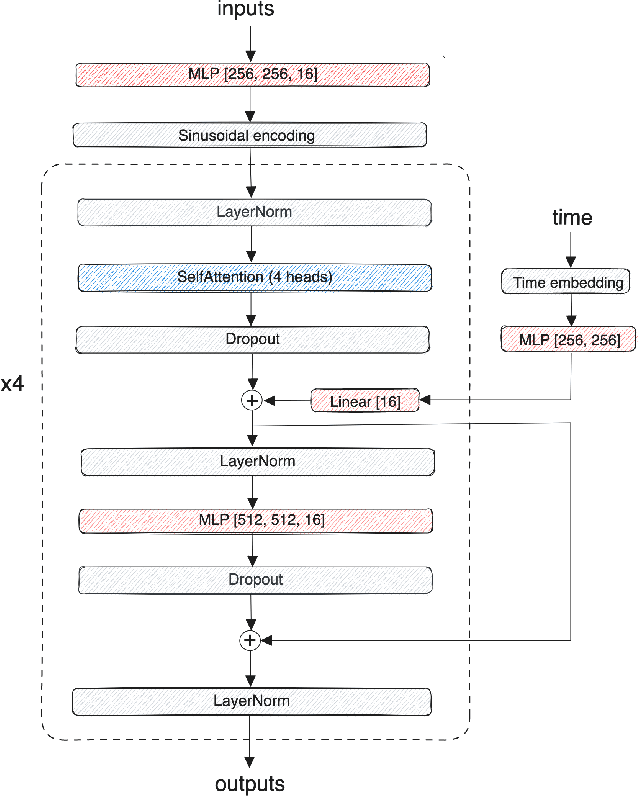
Diffusion probabilistic models (DPMs) have rapidly evolved to be one of the predominant generative models for the simulation of synthetic data, for instance, for computer vision, audio, natural language processing, or biomolecule generation. Here, we propose using DPMs for the generation of synthetic individual location trajectories (ILTs) which are sequences of variables representing physical locations visited by individuals. ILTs are of major importance in mobility research to understand the mobility behavior of populations and to ultimately inform political decision-making. We represent ILTs as multi-dimensional categorical random variables and propose to model their joint distribution using a continuous DPM by first applying the diffusion process in a continuous unconstrained space and then mapping the continuous variables into a discrete space. We demonstrate that our model can synthesize realistic ILPs by comparing conditionally and unconditionally generated sequences to real-world ILPs from a GNSS tracking data set which suggests the potential use of our model for synthetic data generation, for example, for benchmarking models used in mobility research.
Revealing behavioral impact on mobility prediction networks through causal interventions
Nov 20, 2023Deep neural networks are increasingly utilized in mobility prediction tasks, yet their intricate internal workings pose challenges for interpretability, especially in comprehending how various aspects of mobility behavior affect predictions. In this study, we introduce a causal intervention framework to assess the impact of mobility-related factors on neural networks designed for next location prediction -- a task focusing on predicting the immediate next location of an individual. To achieve this, we employ individual mobility models to generate synthetic location visit sequences and control behavior dynamics by intervening in their data generation process. We evaluate the interventional location sequences using mobility metrics and input them into well-trained networks to analyze performance variations. The results demonstrate the effectiveness in producing location sequences with distinct mobility behaviors, thus facilitating the simulation of diverse spatial and temporal changes. These changes result in performance fluctuations in next location prediction networks, revealing impacts of critical mobility behavior factors, including sequential patterns in location transitions, proclivity for exploring new locations, and preferences in location choices at population and individual levels. The gained insights hold significant value for the real-world application of mobility prediction networks, and the framework is expected to promote the use of causal inference for enhancing the interpretability and robustness of neural networks in mobility applications.
Uncertainty quantification and out-of-distribution detection using surjective normalizing flows
Nov 01, 2023



Reliable quantification of epistemic and aleatoric uncertainty is of crucial importance in applications where models are trained in one environment but applied to multiple different environments, often seen in real-world applications for example, in climate science or mobility analysis. We propose a simple approach using surjective normalizing flows to identify out-of-distribution data sets in deep neural network models that can be computed in a single forward pass. The method builds on recent developments in deep uncertainty quantification and generative modeling with normalizing flows. We apply our method to a synthetic data set that has been simulated using a mechanistic model from the mobility literature and several data sets simulated from interventional distributions induced by soft and atomic interventions on that model, and demonstrate that our method can reliably discern out-of-distribution data from in-distribution data. We compare the surjective flow model to a Dirichlet process mixture model and a bijective flow and find that the surjections are a crucial component to reliably distinguish in-distribution from out-of-distribution data.
Uncertainty Quantification for Image-based Traffic Prediction across Cities
Aug 11, 2023Despite the strong predictive performance of deep learning models for traffic prediction, their widespread deployment in real-world intelligent transportation systems has been restrained by a lack of interpretability. Uncertainty quantification (UQ) methods provide an approach to induce probabilistic reasoning, improve decision-making and enhance model deployment potential. To gain a comprehensive picture of the usefulness of existing UQ methods for traffic prediction and the relation between obtained uncertainties and city-wide traffic dynamics, we investigate their application to a large-scale image-based traffic dataset spanning multiple cities and time periods. We compare two epistemic and two aleatoric UQ methods on both temporal and spatio-temporal transfer tasks, and find that meaningful uncertainty estimates can be recovered. We further demonstrate how uncertainty estimates can be employed for unsupervised outlier detection on changes in city traffic dynamics. We find that our approach can capture both temporal and spatial effects on traffic behaviour in a representative case study for the city of Moscow. Our work presents a further step towards boosting uncertainty awareness in traffic prediction tasks, and aims to highlight the value contribution of UQ methods to a better understanding of city traffic dynamics.
Evaluating geospatial context information for travel mode detection
May 30, 2023Detecting travel modes from global navigation satellite system (GNSS) trajectories is essential for understanding individual travel behaviour and a prerequisite for achieving sustainable transport systems. While studies have acknowledged the benefits of incorporating geospatial context information into travel mode detection models, few have summarized context modelling approaches and analyzed the significance of these context features, hindering the development of an efficient model. Here, we identify context representations from related work and propose an analytical pipeline to assess the contribution of geospatial context information for travel mode detection based on a random forest model and the SHapley Additive exPlanation (SHAP) method. Through experiments on a large-scale GNSS tracking dataset, we report that features describing relationships with infrastructure networks, such as the distance to the railway or road network, significantly contribute to the model's prediction. Moreover, features related to the geospatial point entities help identify public transport travel, but most land-use and land-cover features barely contribute to the task. We finally reveal that geospatial contexts have distinct contributions in identifying different travel modes, providing insights into selecting appropriate context information and modelling approaches. The results from this study enhance our understanding of the relationship between movement and geospatial context and guide the implementation of effective and efficient transport mode detection models.
Context-aware multi-head self-attentional neural network model for next location prediction
Dec 04, 2022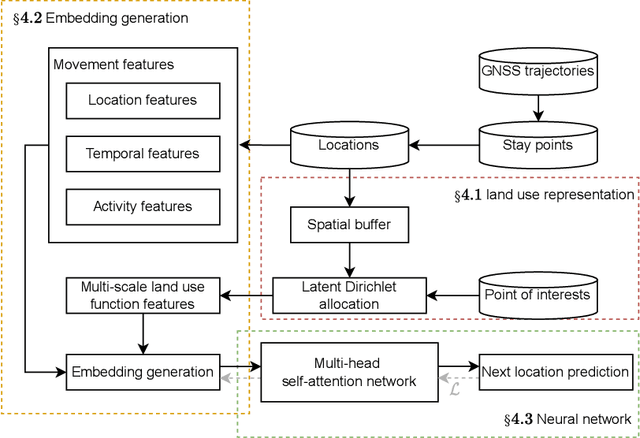
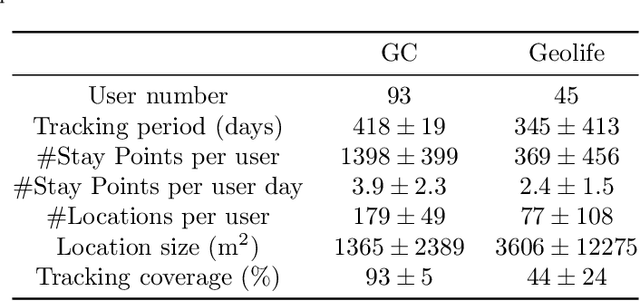
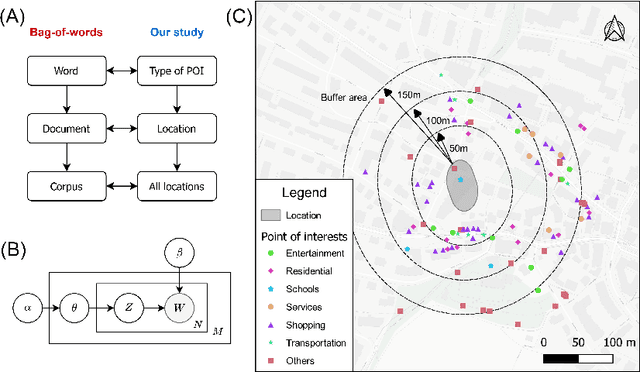
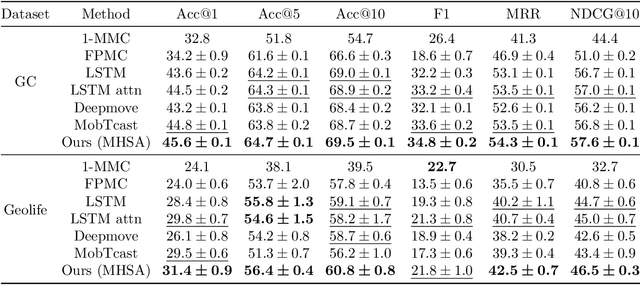
Accurate activity location prediction is a crucial component of many mobility applications and is particularly required to develop personalized, sustainable transportation systems. Despite the widespread adoption of deep learning models, next location prediction models lack a comprehensive discussion and integration of mobility-related spatio-temporal contexts. Here, we utilize a multi-head self-attentional (MHSA) neural network that learns location transition patterns from historical location visits, their visit time and activity duration, as well as their surrounding land use functions, to infer an individual's next location. Specifically, we adopt point-of-interest data and latent Dirichlet allocation for representing locations' land use contexts at multiple spatial scales, generate embedding vectors of the spatio-temporal features, and learn to predict the next location with an MHSA network. Through experiments on two large-scale GNSS tracking datasets, we demonstrate that the proposed model outperforms other state-of-the-art prediction models, and reveal the contribution of various spatio-temporal contexts to the model's performance. Moreover, we find that the model trained on population data achieves higher prediction performance with fewer parameters than individual-level models due to learning from collective movement patterns. We also reveal mobility conducted in the recent past and one week before has the largest influence on the current prediction, showing that learning from a subset of the historical mobility is sufficient to obtain an accurate location prediction result. We believe that the proposed model is vital for context-aware mobility prediction. The gained insights will help to understand location prediction models and promote their implementation for mobility applications.
How do you go where? Improving next location prediction by learning travel mode information using transformers
Oct 08, 2022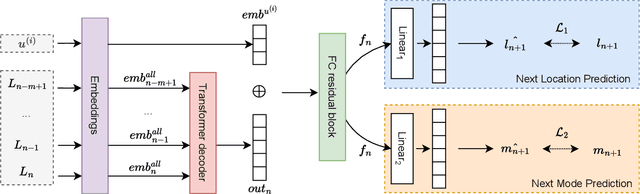
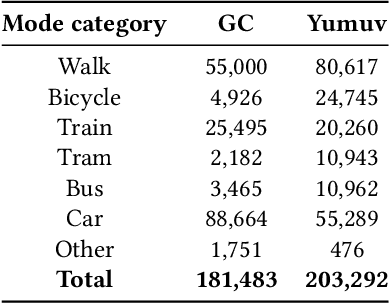
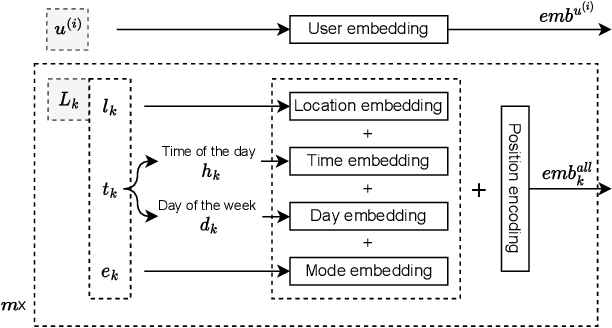
Predicting the next visited location of an individual is a key problem in human mobility analysis, as it is required for the personalization and optimization of sustainable transport options. Here, we propose a transformer decoder-based neural network to predict the next location an individual will visit based on historical locations, time, and travel modes, which are behaviour dimensions often overlooked in previous work. In particular, the prediction of the next travel mode is designed as an auxiliary task to help guide the network's learning. For evaluation, we apply this approach to two large-scale and long-term GPS tracking datasets involving more than 600 individuals. Our experiments show that the proposed method significantly outperforms other state-of-the-art next location prediction methods by a large margin (8.05% and 5.60% relative increase in F1-score for the two datasets, respectively). We conduct an extensive ablation study that quantifies the influence of considering temporal features, travel mode information, and the auxiliary task on the prediction results. Moreover, we experimentally determine the performance upper bound when including the next mode prediction in our model. Finally, our analysis indicates that the performance of location prediction varies significantly with the chosen next travel mode by the individual. These results show potential for a more systematic consideration of additional dimensions of travel behaviour in human mobility prediction tasks. The source code of our model and experiments is available at https://github.com/mie-lab/location-mode-prediction.
Traffic4cast-Traffic Map Movie Forecasting -- Team MIE-Lab
Nov 21, 2019

The goal of the IARAI competition traffic4cast was to predict the city-wide traffic status within a 15-minute time window, based on information from the previous hour. The traffic status was given as multi-channel images (one pixel roughly corresponds to 100x100 meters), where one channel indicated the traffic volume, another one the average speed of vehicles, and a third one their rough heading. As part of our work on the competition, we evaluated many different network architectures, analyzed the statistical properties of the given data in detail, and thought about how to transform the problem to be able to take additional spatio-temporal context-information into account, such as the street network, the positions of traffic lights, or the weather. This document summarizes our efforts that led to our best submission, and gives some insights about which other approaches we evaluated, and why they did not work as well as imagined.