 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeModel selection and real-time skill assessment for suturing in robotic surgery
Jan 17, 2026Automated feedback systems have the potential to provide objective skill assessment for training and evaluation in robot-assisted surgery. In this study, we examine methods to achieve real-time prediction of surgical skill level in real-time based on Objective Structured Assessment of Technical Skills (OSATS) scores. Using data acquired from the da Vinci Surgical System, we carry out three main analyses, focusing on model design, their real-time performance, and their skill-level-based cross-validation training. For the model design, we evaluate the effectiveness of multimodal deep learning models for predicting surgical skill levels using synchronized kinematic and vision data. Our models include separate unimodal baselines and fusion architectures that integrate features from both modalities and are evaluated using mean Spearman's correlation coefficients, demonstrating that the fusion model consistently outperforms unimodal models for real-time predictions. For the real-time performance, we observe the prediction's trend over time and highlight correlation with the surgeon's gestures. For the skill-level-based cross-validation, we separately trained models on surgeons with different skill levels, which showed that high-skill demonstrations allow for better performance than those trained on low-skilled ones and generalize well to similarly skilled participants. Our findings show that multimodal learning allows more stable fine-grained evaluation of surgical performance and highlights the value of expert-level training data for model generalization.
A Hermetic, Transparent Soft Growing Vine Robot System for Pipe Inspection
Oct 30, 2025Rehabilitation of aging pipes requires accurate condition assessment and mapping far into the pipe interiors. Soft growing vine robot systems are particularly promising for navigating confined, sinuous paths such as in pipes, but are currently limited by complex subsystems and a lack of validation in real-world industrial settings. In this paper, we introduce the concept and implementation of a hermetic and transparent vine robot system for visual condition assessment and mapping within non-branching pipes. This design encloses all mechanical and electrical components within the vine robot's soft, airtight, and transparent body, protecting them from environmental interference while enabling visual sensing. Because this approach requires an enclosed mechanism for transporting sensors, we developed, modeled, and tested a passively adapting enclosed tip mount. Finally, we validated the hermetic and transparent vine robot system concept through a real-world condition assessment and mapping task in a wastewater pipe. This work advances the use of soft-growing vine robots in pipe inspection by developing and demonstrating a robust, streamlined, field-validated system suitable for continued development and deployment.
Self-Wearing Adaptive Garments via Soft Robotic Unfurling
Jul 09, 2025Robotic dressing assistance has the potential to improve the quality of life for individuals with limited mobility. Existing solutions predominantly rely on rigid robotic manipulators, which have challenges in handling deformable garments and ensuring safe physical interaction with the human body. Prior robotic dressing methods require excessive operation times, complex control strategies, and constrained user postures, limiting their practicality and adaptability. This paper proposes a novel soft robotic dressing system, the Self-Wearing Adaptive Garment (SWAG), which uses an unfurling and growth mechanism to facilitate autonomous dressing. Unlike traditional approaches,the SWAG conforms to the human body through an unfurling based deployment method, eliminating skin-garment friction and enabling a safer and more efficient dressing process. We present the working principles of the SWAG, introduce its design and fabrication, and demonstrate its performance in dressing assistance. The proposed system demonstrates effective garment application across various garment configurations, presenting a promising alternative to conventional robotic dressing assistance.
Effects of Wrist-Worn Haptic Feedback on Force Accuracy and Task Speed during a Teleoperated Robotic Surgery Task
Jul 09, 2025



Previous work has shown that the addition of haptic feedback to the hands can improve awareness of tool-tissue interactions and enhance performance of teleoperated tasks in robot-assisted minimally invasive surgery. However, hand-based haptic feedback occludes direct interaction with the manipulanda of surgeon console in teleoperated surgical robots. We propose relocating haptic feedback to the wrist using a wearable haptic device so that haptic feedback mechanisms do not need to be integrated into the manipulanda. However, it is unknown if such feedback will be effective, given that it is not co-located with the finger movements used for manipulation. To test if relocated haptic feedback improves force application during teleoperated tasks using da Vinci Research Kit (dVRK) surgical robot, participants learned to palpate a phantom tissue to desired forces. A soft pneumatic wrist-worn haptic device with an anchoring system renders tool-tissue interaction forces to the wrist of the user. Participants performed the palpation task with and without wrist-worn haptic feedback and were evaluated for the accuracy of applied forces. Participants demonstrated statistically significant lower force error when wrist-worn haptic feedback was provided. Participants also performed the palpation task with longer movement times when provided wrist-worn haptic feedback, indicating that the haptic feedback may have caused participants to operate at a different point in the speed-accuracy tradeoff curve.
3D Steering and Localization in Pipes and Burrows using an Externally Steered Soft Growing Robot
Jul 09, 2025



Navigation and inspection in confined environments, such as tunnels and pipes, pose significant challenges for existing robots due to limitations in maneuverability and adaptability to varying geometries. Vine robots, which are soft growing continuum robots that extend their length through soft material eversion at their tip, offer unique advantages due to their ability to navigate tight spaces, adapt to complex paths, and minimize friction. However, existing vine robot designs struggle with navigation in manmade and natural passageways, with branches and sharp 3D turns. In this letter, we introduce a steerable vine robot specifically designed for pipe and burrow environments. The robot features a simple tubular body and an external tip mount that steers the vine robot in three degrees of freedom by changing the growth direction and, when necessary, bracing against the wall of the pipe or burrow. Our external tip steering approach enables: (1) active branch selection in 3D space with a maximum steerable angle of 51.7{\deg}, (2) navigation of pipe networks with radii as small as 2.5 cm, (3) a compliant tip enabling navigation of sharp turns, and (4) real-time 3D localization in GPS-denied environments using tip-mounted sensors and continuum body odometry. We describe the forward kinematics, characterize steerability, and demonstrate the system in a 3D pipe system as well as a natural animal burrow.
Effect of Haptic Feedback on Avoidance Behavior and Visual Exploration in Dynamic VR Pedestrian Environment
Jun 26, 2025Human crowd simulation in virtual reality (VR) is a powerful tool with potential applications including emergency evacuation training and assessment of building layout. While haptic feedback in VR enhances immersive experience, its effect on walking behavior in dense and dynamic pedestrian flows is unknown. Through a user study, we investigated how haptic feedback changes user walking motion in crowded pedestrian flows in VR. The results indicate that haptic feedback changed users' collision avoidance movements, as measured by increased walking trajectory length and change in pelvis angle. The displacements of users' lateral position and pelvis angle were also increased in the instantaneous response to a collision with a non-player character (NPC), even when the NPC was inside the field of view. Haptic feedback also enhanced users' awareness and visual exploration when an NPC approached from the side and back. Furthermore, variation in walking speed was increased by the haptic feedback. These results suggested that the haptic feedback enhanced users' sensitivity to a collision in VR environment.
Mechanically Programming the Cross-Sectional Shape of Soft Growing Robotic Structures for Patient Transfer
May 16, 2025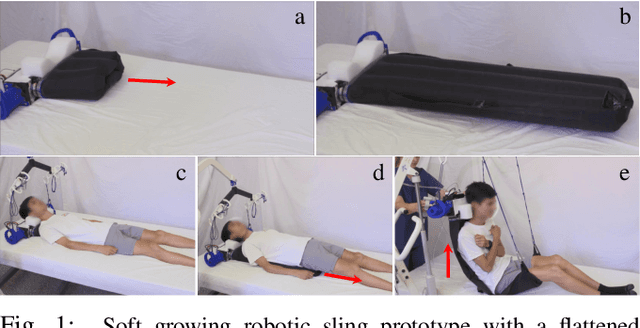
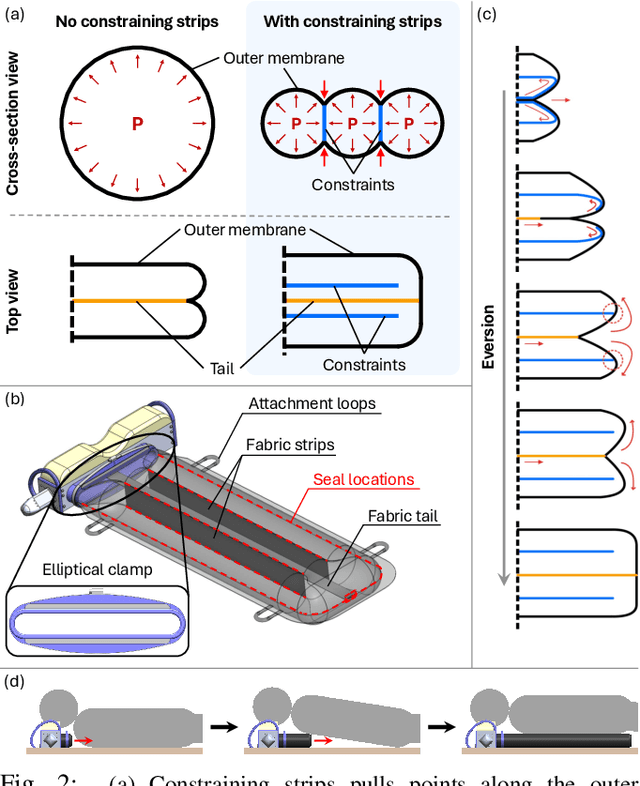
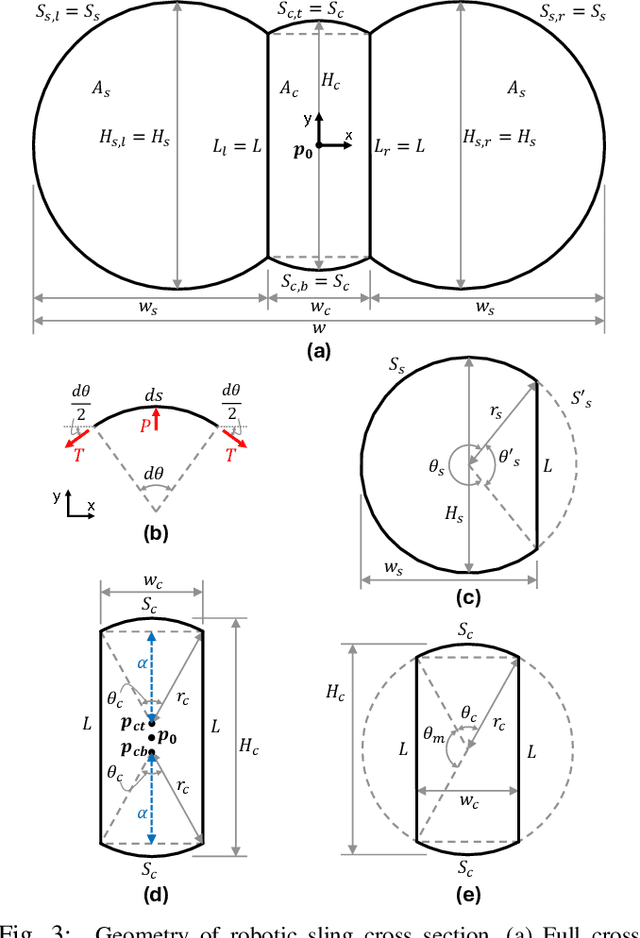
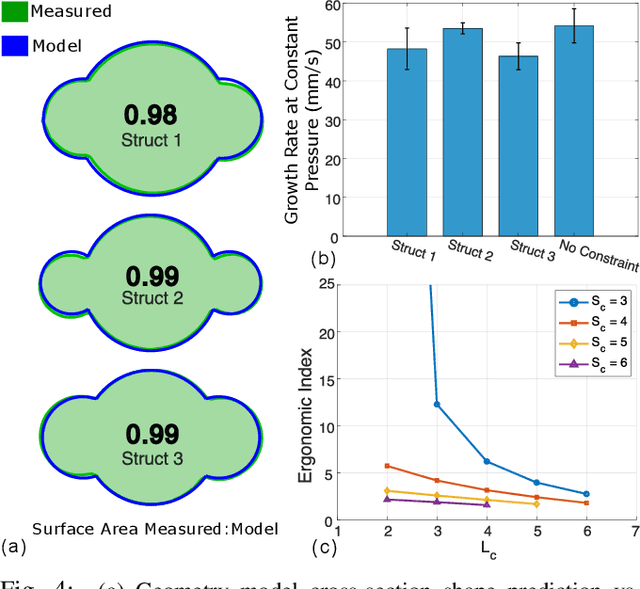
Pneumatic soft everting robotic structures have the potential to facilitate human transfer tasks due to their ability to grow underneath humans without sliding friction and their utility as a flexible sling when deflated. Tubular structures naturally yield circular cross-sections when inflated, whereas a robotic sling must be both thin enough to grow between them and their resting surface and wide enough to cradle the human. Recent works have achieved flattened cross-sections by including rigid components into the structure, but this reduces conformability to the human. We present a method of mechanically programming the cross-section of soft everting robotic structures using flexible strips that constrain radial expansion between points along the outer membrane. Our method enables simultaneously wide and thin profiles while maintaining the full multi-axis flexibility of traditional slings. We develop and validate a model relating the geometric design specifications to the fabrication parameters, and experimentally characterize their effects on growth rate. Finally, we prototype a soft growing robotic sling system and demonstrate its use for assisting a single caregiver in bed-to-chair patient transfer.
Loop closure grasping: Topological transformations enable strong, gentle, and versatile grasps
May 15, 2025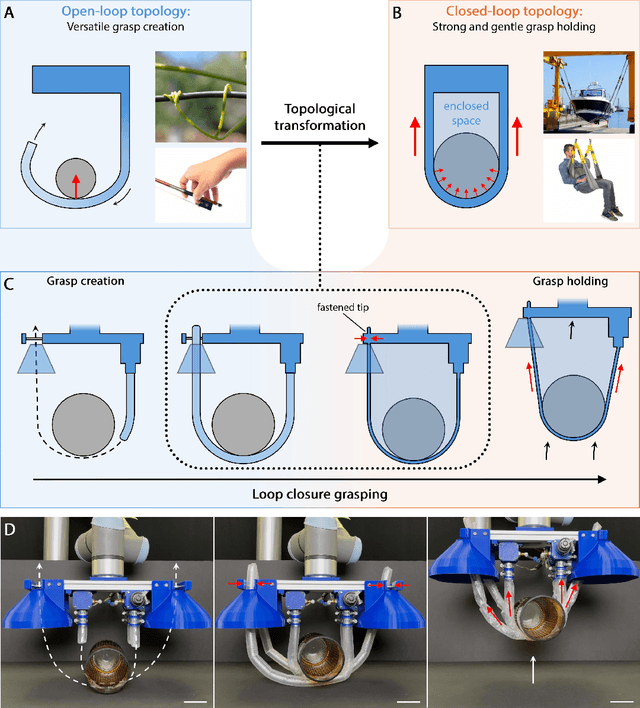
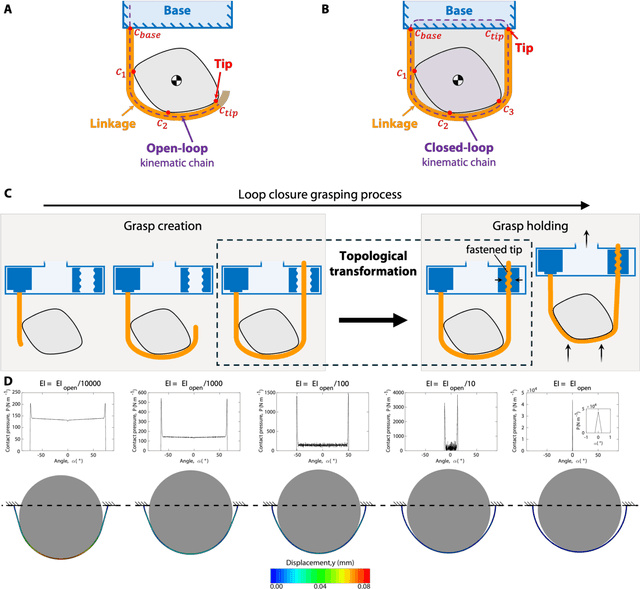

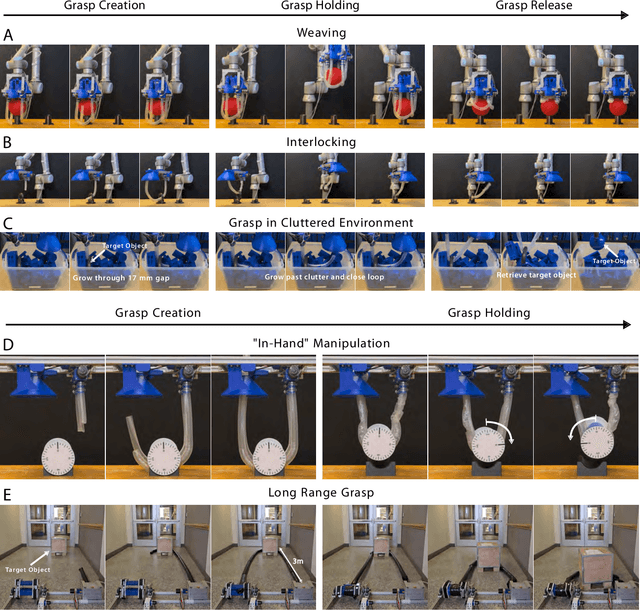
Grasping mechanisms must both create and subsequently hold grasps that permit safe and effective object manipulation. Existing mechanisms address the different functional requirements of grasp creation and grasp holding using a single morphology, but have yet to achieve the simultaneous strength, gentleness, and versatility needed for many applications. We present "loop closure grasping", a class of robotic grasping that addresses these different functional requirements through topological transformations between open-loop and closed-loop morphologies. We formalize these morphologies for grasping, formulate the loop closure grasping method, and present principles and a design architecture that we implement using soft growing inflated beams, winches, and clamps. The mechanisms' initial open-loop topology enables versatile grasp creation via unencumbered tip movement, and closing the loop enables strong and gentle holding with effectively infinite bending compliance. Loop closure grasping circumvents the tradeoffs of single-morphology designs, enabling grasps involving historically challenging objects, environments, and configurations.
A Study of Perceived Safety for Soft Robotics in Caregiving Tasks
Mar 26, 2025

In this project, we focus on human-robot interaction in caregiving scenarios like bathing, where physical contact is inevitable and necessary for proper task execution because force must be applied to the skin. Using finite element analysis, we designed a 3D-printed gripper combining positive and negative pressure for secure yet compliant handling. Preliminary tests showed it exerted a lower, more uniform pressure profile than a standard rigid gripper. In a user study, participants' trust in robots significantly increased after they experienced a brief bathing demonstration performed by a robotic arm equipped with the soft gripper. These results suggest that soft robotics can enhance perceived safety and acceptance in intimate caregiving scenarios.
Flying Vines: Design, Modeling, and Control of a Soft Aerial Robotic Arm
Mar 26, 2025



Aerial robotic arms aim to enable inspection and environment interaction in otherwise hard-to-reach areas from the air. However, many aerial manipulators feature bulky or heavy robot manipulators mounted to large, high-payload aerial vehicles. Instead, we propose an aerial robotic arm with low mass and a small stowed configuration called a "flying vine". The flying vine consists of a small, maneuverable quadrotor equipped with a soft, growing, inflated beam as the arm. This soft robot arm is underactuated, and positioning of the end effector is achieved by controlling the coupled quadrotor-vine dynamics. In this work, we present the flying vine design and a modeling and control framework for tracking desired end effector trajectories. The dynamic model leverages data-driven modeling methods and introduces bilinear interpolation to account for time-varying dynamic parameters. We use trajectory optimization to plan quadrotor controls that produce desired end effector motions. Experimental results on a physical prototype demonstrate that our framework enables the flying vine to perform high-speed end effector tracking, laying a foundation for performing dynamic maneuvers with soft aerial manipulators.