 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLoop closure grasping: Topological transformations enable strong, gentle, and versatile grasps
May 15, 2025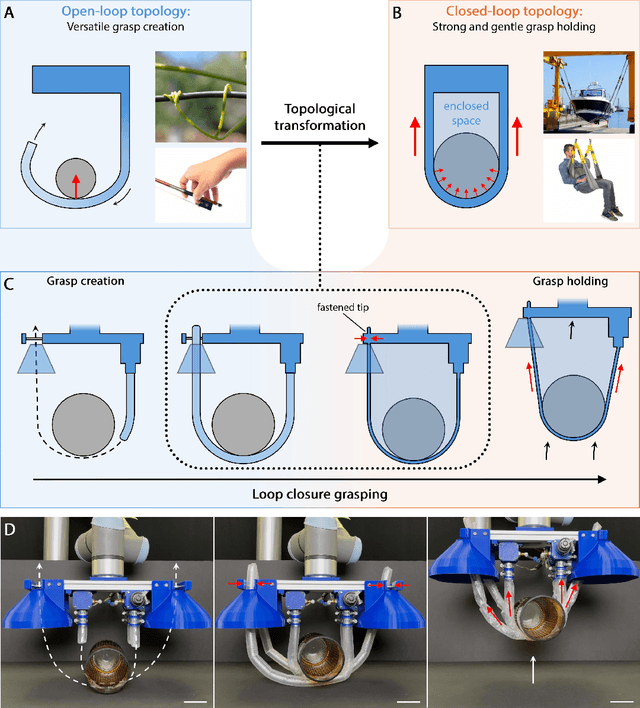
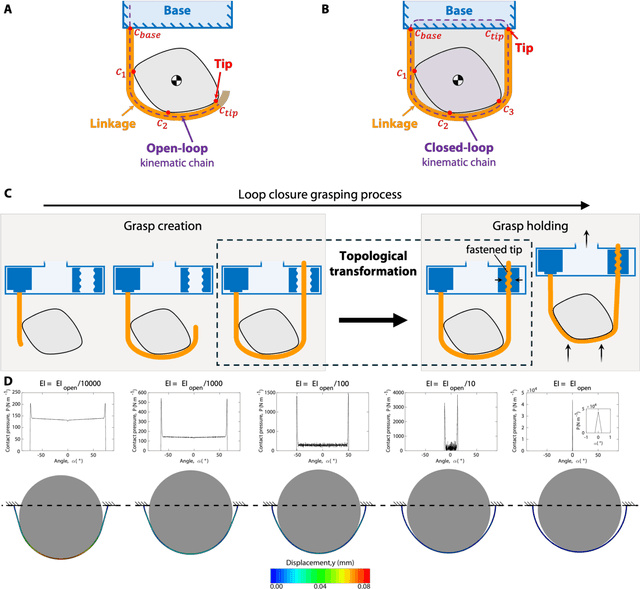

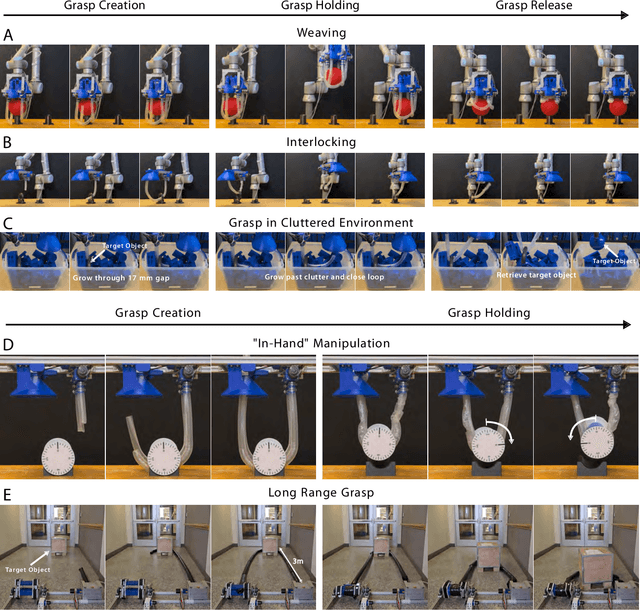
Grasping mechanisms must both create and subsequently hold grasps that permit safe and effective object manipulation. Existing mechanisms address the different functional requirements of grasp creation and grasp holding using a single morphology, but have yet to achieve the simultaneous strength, gentleness, and versatility needed for many applications. We present "loop closure grasping", a class of robotic grasping that addresses these different functional requirements through topological transformations between open-loop and closed-loop morphologies. We formalize these morphologies for grasping, formulate the loop closure grasping method, and present principles and a design architecture that we implement using soft growing inflated beams, winches, and clamps. The mechanisms' initial open-loop topology enables versatile grasp creation via unencumbered tip movement, and closing the loop enables strong and gentle holding with effectively infinite bending compliance. Loop closure grasping circumvents the tradeoffs of single-morphology designs, enabling grasps involving historically challenging objects, environments, and configurations.
A Study of Perceived Safety for Soft Robotics in Caregiving Tasks
Mar 26, 2025

In this project, we focus on human-robot interaction in caregiving scenarios like bathing, where physical contact is inevitable and necessary for proper task execution because force must be applied to the skin. Using finite element analysis, we designed a 3D-printed gripper combining positive and negative pressure for secure yet compliant handling. Preliminary tests showed it exerted a lower, more uniform pressure profile than a standard rigid gripper. In a user study, participants' trust in robots significantly increased after they experienced a brief bathing demonstration performed by a robotic arm equipped with the soft gripper. These results suggest that soft robotics can enhance perceived safety and acceptance in intimate caregiving scenarios.
Finite Element Modeling of Pneumatic Bending Actuators for Inflated-Beam Robots
Jun 06, 2023
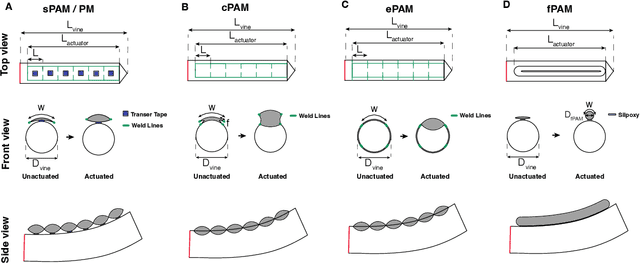
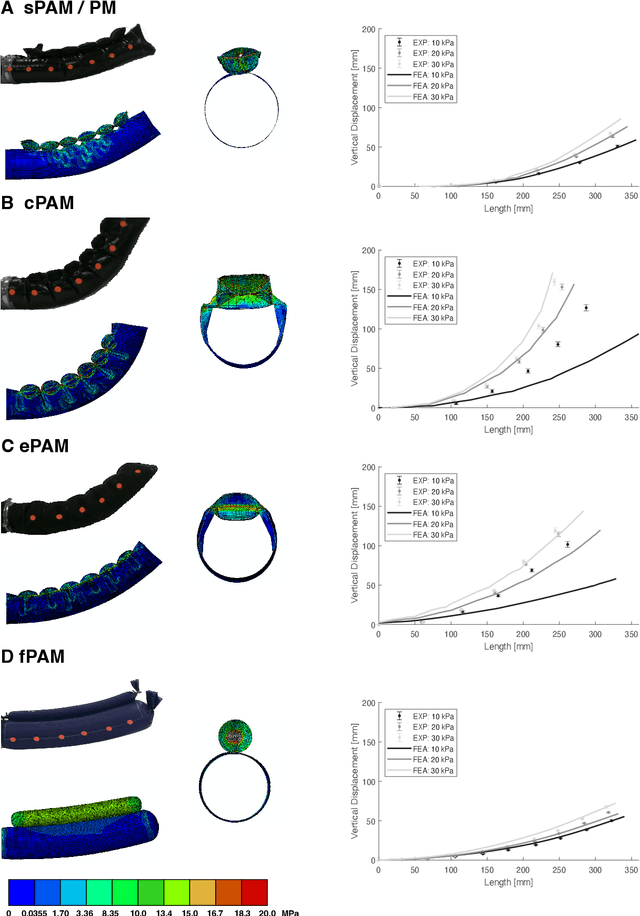
Inflated-beam soft robots, such as tip-everting vine robots, can control their curvature by contracting one side of the beam using pneumatic actuation. In this work, a general finite element modeling approach is developed and applied to characterize bending of inflated-beam soft robots. The model is tested on four types of pneumatic actuators used in these robots (series, compression, embedded, and fabric pneumatic artificial muscles) and can be extended to other designs. Actuators rely on two types of bending mechanisms: geometry-based contraction and material-based contraction. Geometry-based contraction implies shape-change of the muscles from a flat to an inflated shortened configuration that causes buckling of the inflated beam. Material-based contraction relies on material anisotropy to produce a contraction effect. The model depicts both mechanisms and accommodates for the complex and highly nonlinear effects of buckling and anisotropy. Simulation results are verified experimentally for each actuator type at three working pressures (10, 20, and 30 kPa). Geometry-based contraction achieves the largest deformation at accuracy values of 92.1% and higher once the buckling pattern is established, and 80.7% and higher for lower pressures due to the stress singularities occurring with buckling formation. Material-based contraction achieves smaller bending angles but is at least 96.7% accurate. The models are freely available online, and can thus be used by others to design inflated-beam robots, such as tip-everting vine robots. Labor and material waste can be reduced with this tool by optimizing designs that use knowledge of material properties and stress to distributions to enable bending and manage stress peaks.
A Comparison of Pneumatic Actuators for Soft Growing Vine Robots
May 01, 2023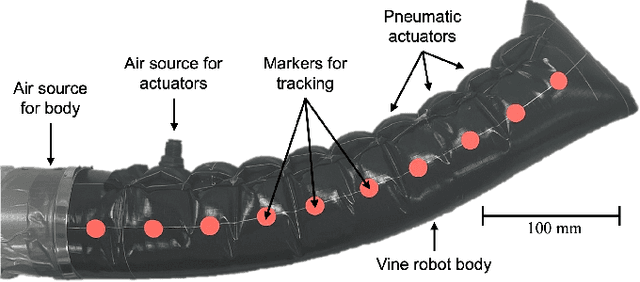
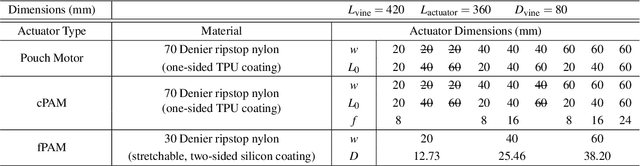
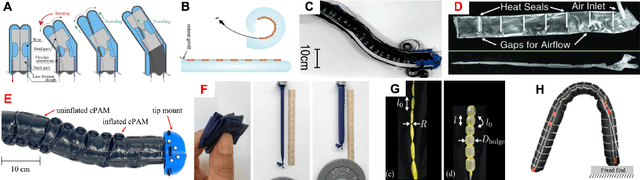
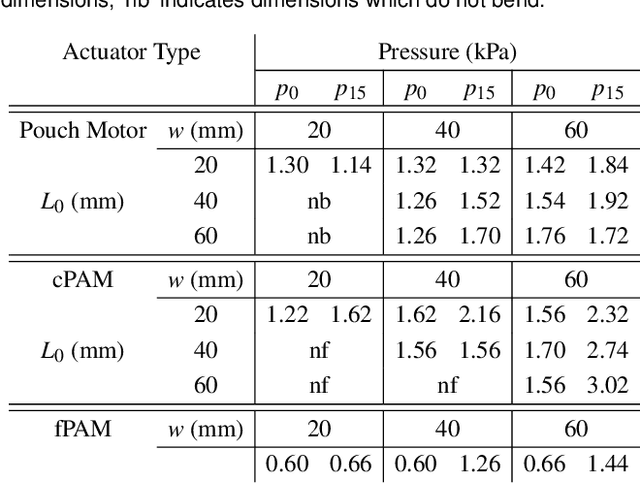
Soft pneumatic actuators are used to steer soft growing "vine" robots while being flexible enough to undergo the tip eversion required for growth. They also meet the requirements to steer soft growing vine robots through challenging terrain. In this study, we compared the performance of three types of pneumatic actuators in terms of their ability to perform eversion, bending, dynamic motion, and force: the pouch motor, the cylindrical pneumatic artificial muscle (cPAM), and the fabric pneumatic artificial muscle (fPAM). The pouch motor is advantageous for prototyping due to its simple manufacturing process. The cPAM exhibits superior bending behavior and produces the highest forces, while the fPAM actuates fastest and everts at the lowest pressure. We evaluated a similar range of dimensions for each actuator type. Larger actuators can produce more significant deformations and forces, but smaller actuators inflate more quickly and require a lower eversion pressure. Since vine robots are lightweight, the effect of gravity on the functionality of different actuators is minimal. We developed a new analytical model that predicts the pressure-to-bending behavior of vine robot actuators. Using the actuator results, we designed and demonstrated a 4.8 m long vine robot equipped with highly maneuverable 60x60 mm cPAMs in a three-dimensional obstacle course. The vine robot was able to move around sharp turns, travel through a passage smaller than its diameter, and lift itself against gravity.