 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeComparison between Behavior Trees and Finite State Machines
May 25, 2024



Behavior Trees (BTs) were first conceived in the computer games industry as a tool to model agent behavior, but they received interest also in the robotics community as an alternative policy design to Finite State Machines (FSMs). The advantages of BTs over FSMs had been highlighted in many works, but there is no thorough practical comparison of the two designs. Such a comparison is particularly relevant in the robotic industry, where FSMs have been the state-of-the-art policy representation for robot control for many years. In this work we shed light on this matter by comparing how BTs and FSMs behave when controlling a robot in a mobile manipulation task. The comparison is made in terms of reactivity, modularity, readability, and design. We propose metrics for each of these properties, being aware that while some are tangible and objective, others are more subjective and implementation dependent. The practical comparison is performed in a simulation environment with validation on a real robot. We find that although the robot's behavior during task solving is independent on the policy representation, maintaining a BT rather than an FSM becomes easier as the task increases in complexity.
A Comparison of Pneumatic Actuators for Soft Growing Vine Robots
May 01, 2023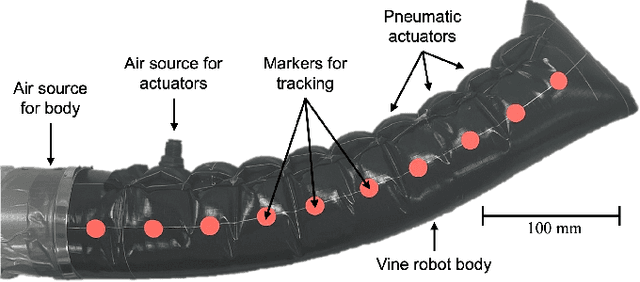
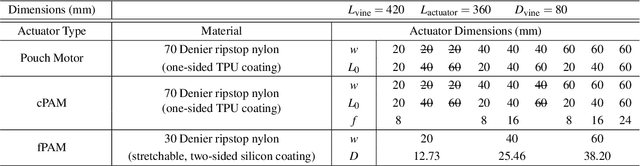
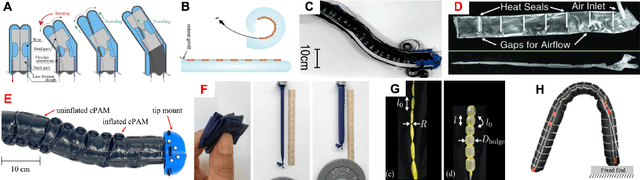
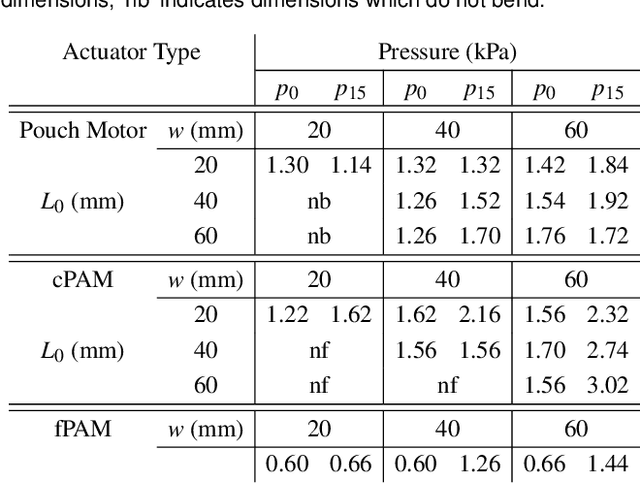
Soft pneumatic actuators are used to steer soft growing "vine" robots while being flexible enough to undergo the tip eversion required for growth. They also meet the requirements to steer soft growing vine robots through challenging terrain. In this study, we compared the performance of three types of pneumatic actuators in terms of their ability to perform eversion, bending, dynamic motion, and force: the pouch motor, the cylindrical pneumatic artificial muscle (cPAM), and the fabric pneumatic artificial muscle (fPAM). The pouch motor is advantageous for prototyping due to its simple manufacturing process. The cPAM exhibits superior bending behavior and produces the highest forces, while the fPAM actuates fastest and everts at the lowest pressure. We evaluated a similar range of dimensions for each actuator type. Larger actuators can produce more significant deformations and forces, but smaller actuators inflate more quickly and require a lower eversion pressure. Since vine robots are lightweight, the effect of gravity on the functionality of different actuators is minimal. We developed a new analytical model that predicts the pressure-to-bending behavior of vine robot actuators. Using the actuator results, we designed and demonstrated a 4.8 m long vine robot equipped with highly maneuverable 60x60 mm cPAMs in a three-dimensional obstacle course. The vine robot was able to move around sharp turns, travel through a passage smaller than its diameter, and lift itself against gravity.
A Multi-Segment, Soft Growing Robot with Selective Steering
Dec 07, 2022



Everting, soft growing vine robots benefit from reduced friction with their environment, which allows them to navigate challenging terrain. Vine robots can use air pouches attached to their sides for lateral steering. However, when all pouches are serially connected, the whole robot can only perform one constant curvature in free space. It must contact the environment to navigate through obstacles along paths with multiple turns. This work presents a multi-segment vine robot that can navigate complex paths without interacting with its environment. This is achieved by a new steering method that selectively actuates each single pouch at the tip, providing high degrees of freedom with few control inputs. A small magnetic valve connects each pouch to a pressure supply line. A motorized tip mount uses an interlocking mechanism and motorized rollers on the outer material of the vine robot. As each valve passes through the tip mount, a permanent magnet inside the tip mount opens the valve so the corresponding pouch is connected to the pressure supply line at the same moment. Novel cylindrical pneumatic artificial muscles (cPAMs) are integrated into the vine robot and inflate to a cylindrical shape for improved bending characteristics compared to other state-of-the art vine robots. The motorized tip mount controls a continuous eversion speed and enables controlled retraction. A final prototype was able to repeatably grow into different shapes and hold these shapes. We predict the path using a model that assumes a piecewise constant curvature along the outside of the multi-segment vine robot. The proposed multi-segment steering method can be extended to other soft continuum robot designs.
On the programming effort required to generate Behavior Trees and Finite State Machines for robotic applications
Sep 15, 2022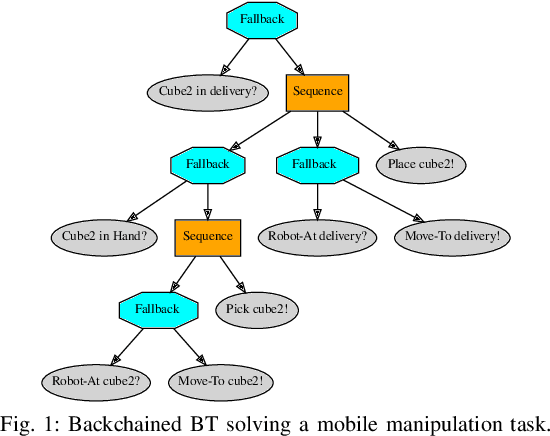
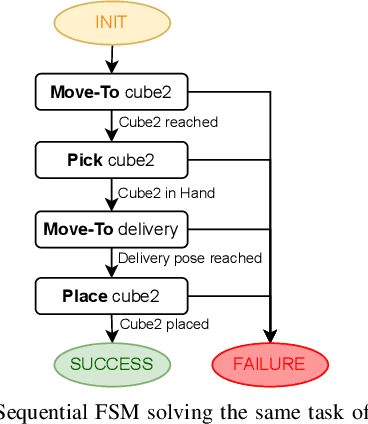
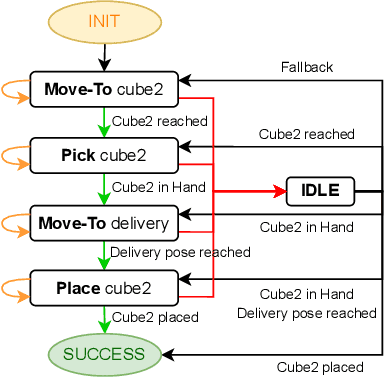
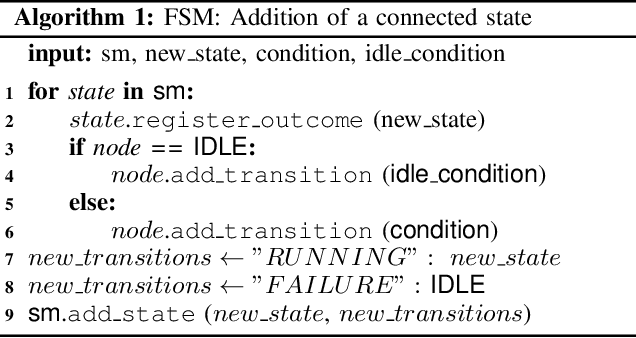
In this paper we provide a practical demonstration of how the modularity in a Behavior Tree (BT) decreases the effort in programming a robot task when compared to a Finite State Machine (FSM). In recent years the way to represent a task plan to control an autonomous agent has been shifting from the standard FSM towards BTs. Many works in the literature have highlighted and proven the benefits of such design compared to standard approaches, especially in terms of modularity, reactivity and human readability. However, these works have often failed in providing a tangible comparison in the implementation of those policies and the programming effort required to modify them. This is a relevant aspect in many robotic applications, where the design choice is dictated both by the robustness of the policy and by the time required to program it. In this work, we compare backward chained BTs with a fault-tolerant design of FSMs by evaluating the cost to modify them. We validate the analysis with a set of experiments in a simulation environment where a mobile manipulator solves an item fetching task.
RoBoa: Construction and Evaluation of a Steerable Vine Robot for Search and Rescue Applications
Mar 28, 2022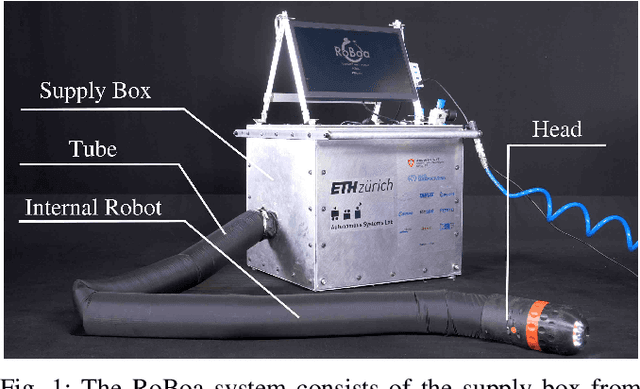
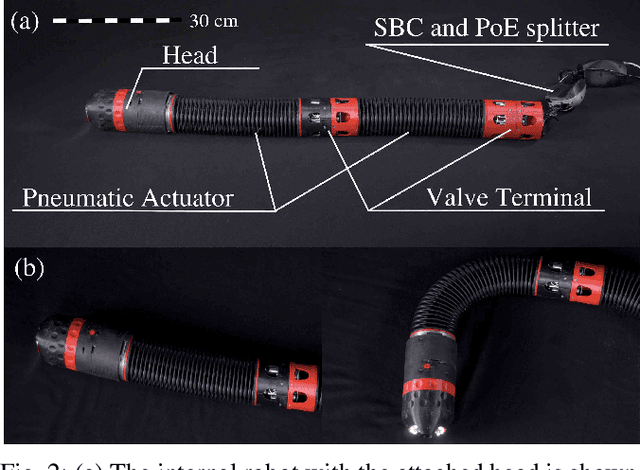
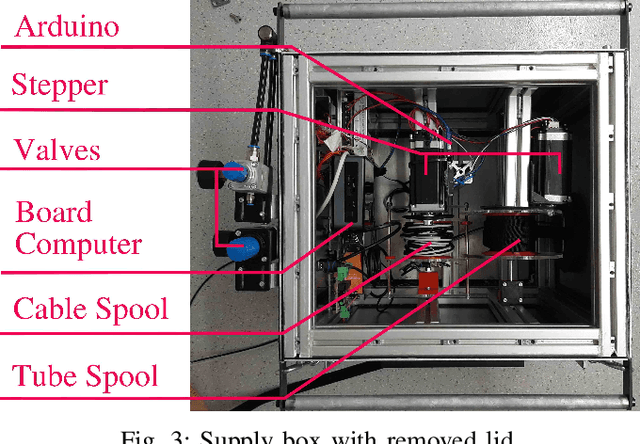
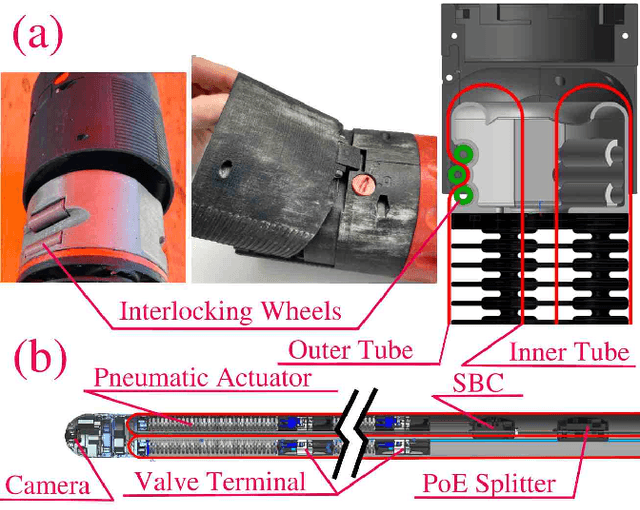
RoBoa is a vine-like search and rescue robot that can explore narrow and cluttered environments such as destroyed buildings. The robot assists rescue teams in finding and communicating with trapped people. It employs the principle of vine robots for locomotion, everting the tip of its tube to move forward. Inside the tube, pneumatic actuators enable lateral movement. The head carries sensors and is mounted outside at the tip of the tube. At the back, a supply box contains the rolled up tube and provides pressurized air, power, computation, as well as an interface for the user to interact with the system. A decentralized control scheme was implemented that reduces the required number of cables and takes care of the low-level control of the pneumatic actuators. The design, characterization, and experimental evaluation of the system and its crucial components is shown. The complete prototype is fully functional and was evaluated in a realistic environment of a collapsed building where the remote-controlled robot was able to repeatedly locate a trapped person after a travel distance of about 10 m.
* 6 pages, 5 figures, 2021 IEEE 4th International Conference on Soft Robotics (RoboSoft). For associated video, see this https://www.youtube.com/watch?v=W6wlZ9kaUvo
Points2Vec: Unsupervised Object-level Feature Learning from Point Clouds
Feb 08, 2021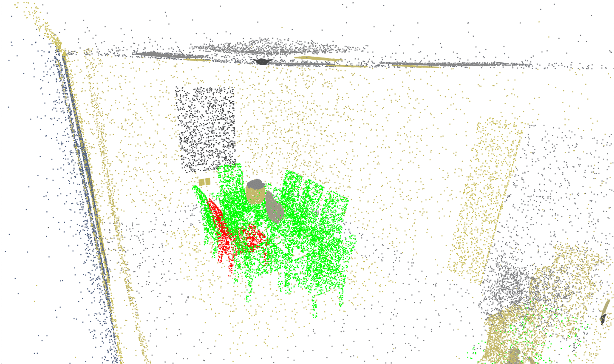
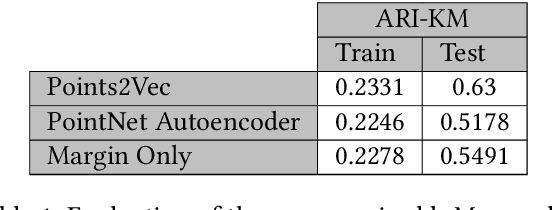
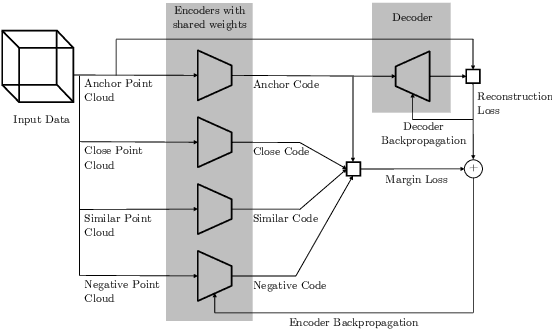
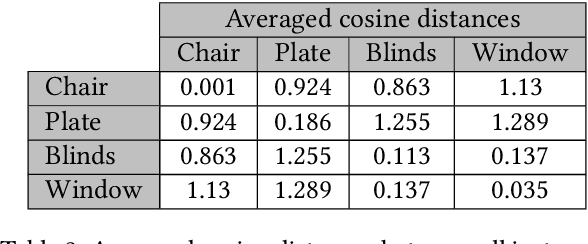
Unsupervised representation learning techniques, such as learning word embeddings, have had a significant impact on the field of natural language processing. Similar representation learning techniques have not yet become commonplace in the context of 3D vision. This, despite the fact that the physical 3D spaces have a similar semantic structure to bodies of text: words are surrounded by words that are semantically related, just like objects are surrounded by other objects that are similar in concept and usage. In this work, we exploit this structure in learning semantically meaningful low dimensional vector representations of objects. We learn these vector representations by mining a dataset of scanned 3D spaces using an unsupervised algorithm. We represent objects as point clouds, a flexible and general representation for 3D data, which we encode into a vector representation. We show that using our method to include context increases the ability of a clustering algorithm to distinguish different semantic classes from each other. Furthermore, we show that our algorithm produces continuous and meaningful object embeddings through interpolation experiments.
Autonomous Extension of a Symbolic Mobile Manipulation Skill Set
Oct 20, 2020
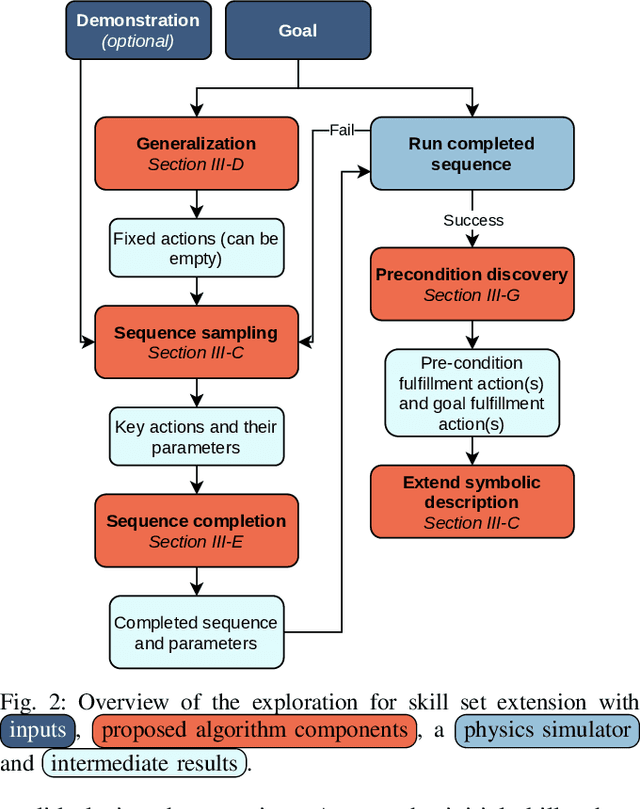
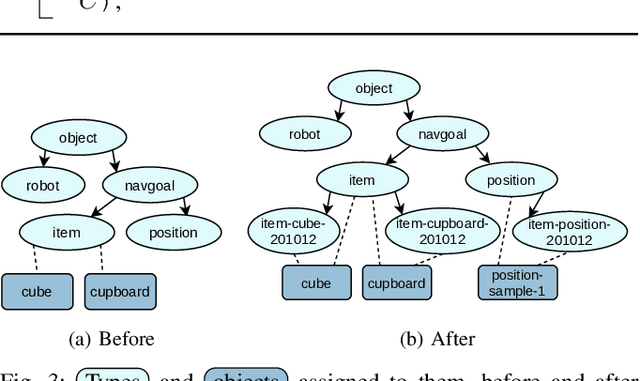
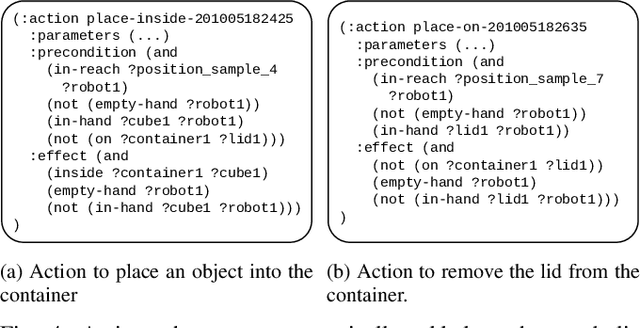
Today's methods of programming mobile manipulation systems' behavior for operating in unstructured environments do not generalize well to unseen tasks or changes in the environment not anticipated at design time. Although symbolic planning makes this task more accessible to non-expert users by allowing a user to specify a desired goal, it reaches its limits when a task or the current environment is not soundly represented by the abstract domain or problem description. We propose a method that allows an agent to autonomously extend its skill set and thus the abstract description upon encountering such a situation. For this, we combine a set of four basic skills (grasp, place, navigate, move) with an off-the-shelf symbolic planner upon which we base a skill sequence exploration scheme. To make the search over skill sequences more efficient and effective, we introduce strategies for generalizing from previous experience, completing sequences of key skills and discovering preconditions. The resulting system is evaluated in simulation using object rearrangement tasks. We can show qualitatively that the skill set extension works as expected and quantitatively that our strategies for more efficient search make the approach computationally tractable.
Go Fetch: Mobile Manipulation in Unstructured Environments
Apr 02, 2020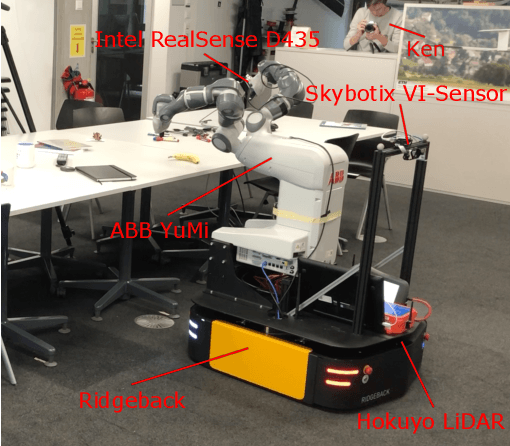
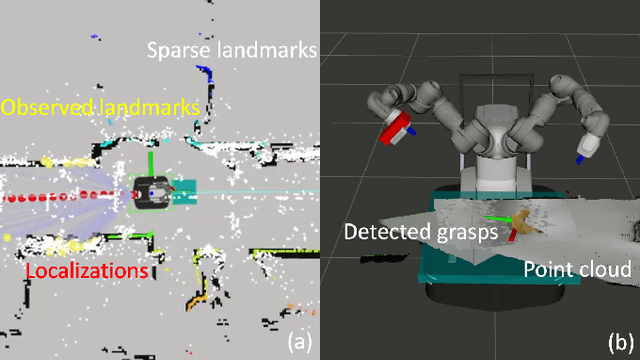
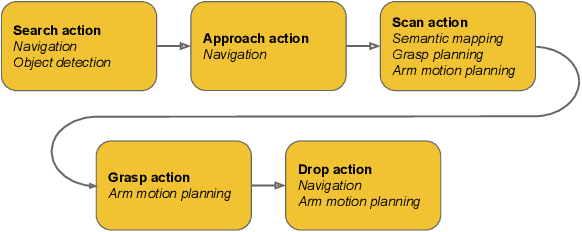
With humankind facing new and increasingly large-scale challenges in the medical and domestic spheres, automation of the service sector carries a tremendous potential for improved efficiency, quality, and safety of operations. Mobile robotics can offer solutions with a high degree of mobility and dexterity, however these complex systems require a multitude of heterogeneous components to be carefully integrated into one consistent framework. This work presents a mobile manipulation system that combines perception, localization, navigation, motion planning and grasping skills into one common workflow for fetch and carry applications in unstructured indoor environments. The tight integration across the various modules is experimentally demonstrated on the task of finding a commonly available object in an office environment, grasping it, and delivering it to a desired drop-off location. The accompanying video is available at https://youtu.be/e89_Xg1sLnY.
Meteorology-Aware Multi-Goal Path Planning for Large-Scale Inspection Missions with Long-Endurance Solar-Powered Aircraft
Nov 28, 2017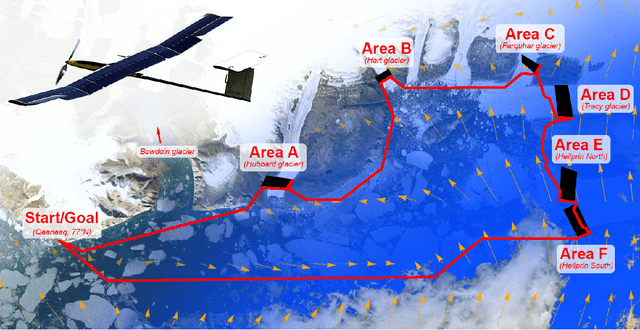
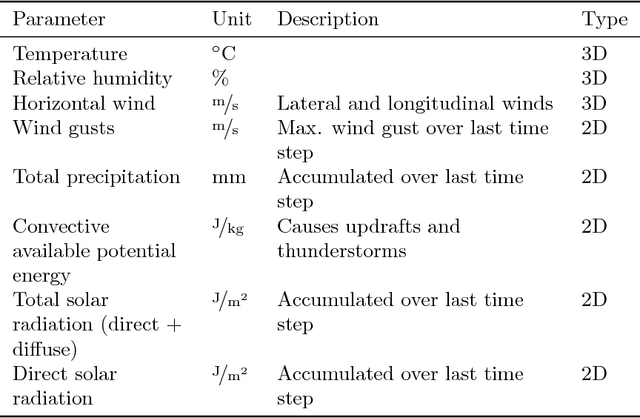
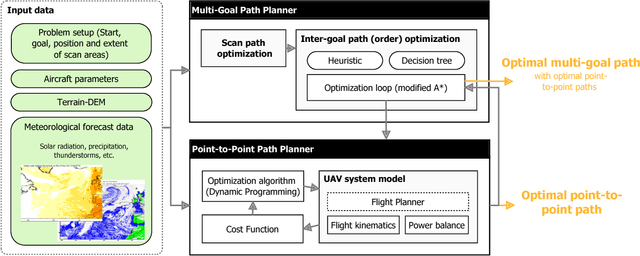
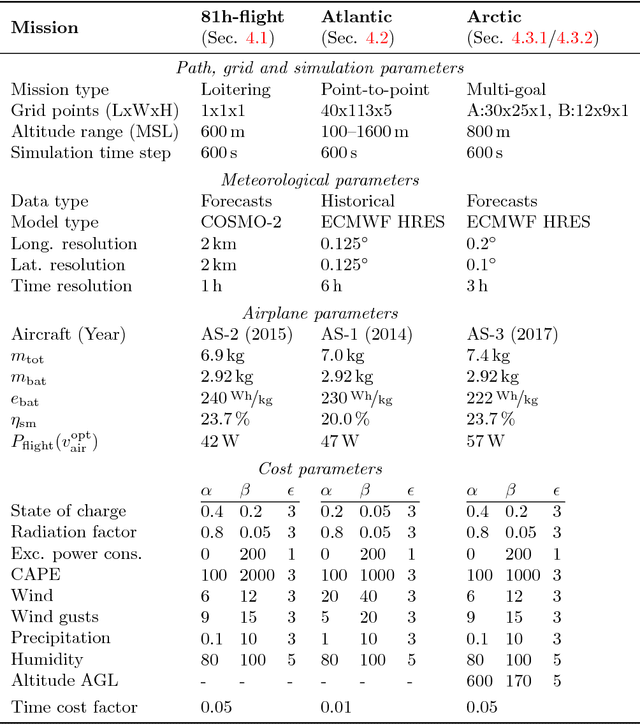
Solar-powered aircraft promise significantly increased flight endurance over conventional aircraft. While this makes them promising candidates for large-scale aerial inspection missions, their structural fragility necessitates that adverse weather is avoided using appropriate path planning methods. This paper therefore presents MetPASS, the Meteorology-aware Path Planning and Analysis Software for Solar-powered UAVs. MetPASS is the first path planning framework in the literature that considers all aspects that influence the safety or performance of solar-powered flight: It avoids environmental risks (thunderstorms, rain, wind, wind gusts and humidity) and exploits advantageous regions (high sun radiation or tailwind). It also avoids system risks such as low battery state of charge and returns safe paths through cluttered terrain. MetPASS imports weather data from global meteorological models, propagates the aircraft state through an energetic system model, and then combines both into a cost function. A combination of dynamic programming techniques and an A*-search-algorithm with a custom heuristic is leveraged to plan globally optimal paths in station-keeping, point-to-point or multi-goal aerial inspection missions with coverage guarantees. A full software implementation including a GUI is provided. The planning methods are verified using three missions of ETH Zurich's AtlantikSolar UAV: An 81-hour continuous solar-powered station-keeping flight, a 4000km Atlantic crossing from Newfoundland to Portugal, and two multi-glacier aerial inspection missions above the Arctic Ocean performed near Greenland in summer 2017.