 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeGo Fetch: Mobile Manipulation in Unstructured Environments
Paper and Code
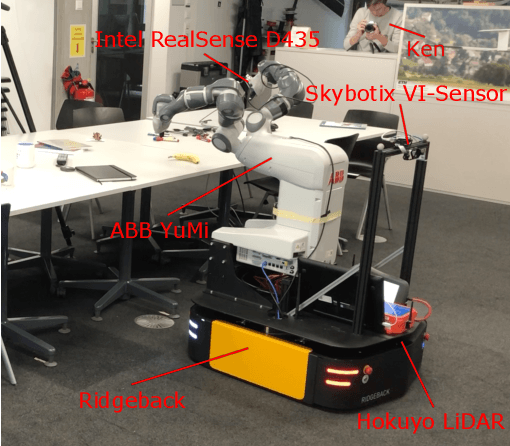
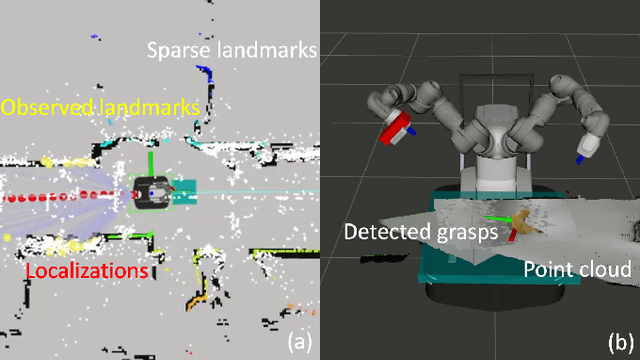
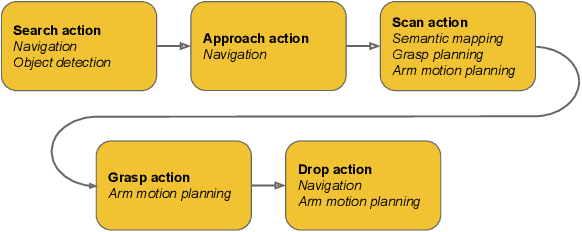
With humankind facing new and increasingly large-scale challenges in the medical and domestic spheres, automation of the service sector carries a tremendous potential for improved efficiency, quality, and safety of operations. Mobile robotics can offer solutions with a high degree of mobility and dexterity, however these complex systems require a multitude of heterogeneous components to be carefully integrated into one consistent framework. This work presents a mobile manipulation system that combines perception, localization, navigation, motion planning and grasping skills into one common workflow for fetch and carry applications in unstructured indoor environments. The tight integration across the various modules is experimentally demonstrated on the task of finding a commonly available object in an office environment, grasping it, and delivering it to a desired drop-off location. The accompanying video is available at https://youtu.be/e89_Xg1sLnY.