 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeRotograb: Combining Biomimetic Hands with Industrial Grippers using a Rotating Thumb
Dec 04, 2024The development of robotic grippers and hands for automation aims to emulate human dexterity without sacrificing the efficiency of industrial grippers. This study introduces Rotograb, a tendon-actuated robotic hand featuring a novel rotating thumb. The aim is to combine the dexterity of human hands with the efficiency of industrial grippers. The rotating thumb enlarges the workspace and allows in-hand manipulation. A novel joint design minimizes movement interference and simplifies kinematics, using a cutout for tendon routing. We integrate teleoperation, using a depth camera for real-time tracking and autonomous manipulation powered by reinforcement learning with proximal policy optimization. Experimental evaluations demonstrate that Rotograb's rotating thumb greatly improves both operational versatility and workspace. It can handle various grasping and manipulation tasks with objects from the YCB dataset, with particularly good results when rotating objects within its grasp. Rotograb represents a notable step towards bridging the capability gap between human hands and industrial grippers. The tendon-routing and thumb-rotating mechanisms allow for a new level of control and dexterity. Integrating teleoperation and autonomous learning underscores Rotograb's adaptability and sophistication, promising substantial advancements in both robotics research and practical applications.
Replicating Human Anatomy with Vision Controlled Jetting -- A Pneumatic Musculoskeletal Hand and Forearm
Apr 29, 2024The functional replication and actuation of complex structures inspired by nature is a longstanding goal for humanity. Creating such complex structures combining soft and rigid features and actuating them with artificial muscles would further our understanding of natural kinematic structures. We printed a biomimetic hand in a single print process comprised of a rigid skeleton, soft joint capsules, tendons, and printed touch sensors. We showed it's actuation using electric motors. In this work, we expand on this work by adding a forearm that is also closely modeled after the human anatomy and replacing the hand's motors with 22 independently controlled pneumatic artificial muscles (PAMs). Our thin, high-strain (up to 30.1%) PAMs match the performance of state-of-the-art artificial muscles at a lower cost. The system showcases human-like dexterity with independent finger movements, demonstrating successful grasping of various objects, ranging from a small, lightweight coin to a large can of 272g in weight. The performance evaluation, based on fingertip and grasping forces along with finger joint range of motion, highlights the system's potential.
A Comparison of Pneumatic Actuators for Soft Growing Vine Robots
May 01, 2023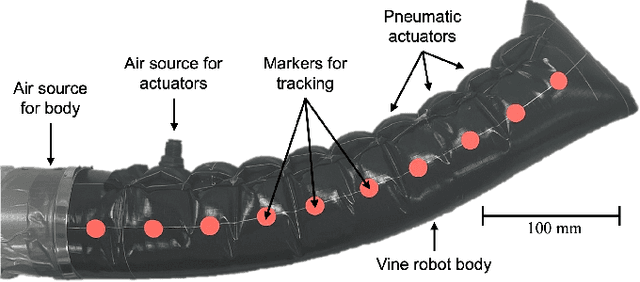
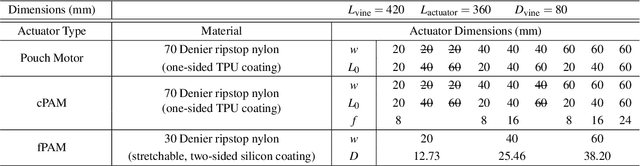
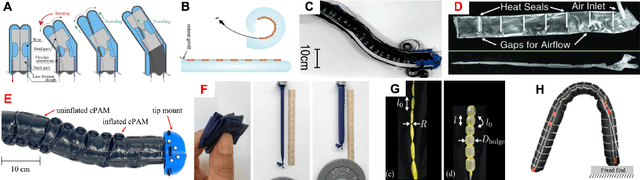
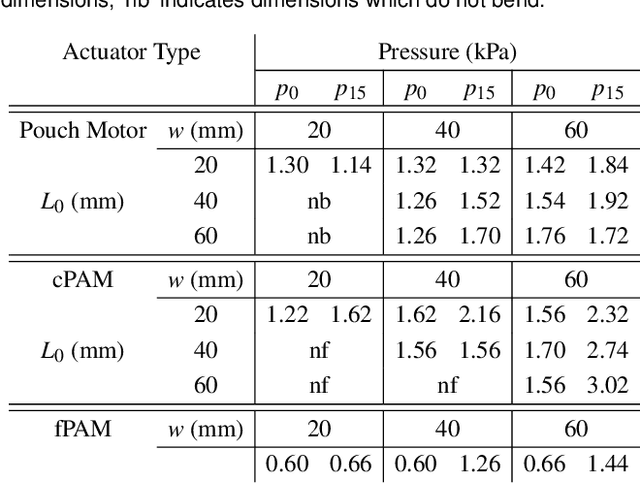
Soft pneumatic actuators are used to steer soft growing "vine" robots while being flexible enough to undergo the tip eversion required for growth. They also meet the requirements to steer soft growing vine robots through challenging terrain. In this study, we compared the performance of three types of pneumatic actuators in terms of their ability to perform eversion, bending, dynamic motion, and force: the pouch motor, the cylindrical pneumatic artificial muscle (cPAM), and the fabric pneumatic artificial muscle (fPAM). The pouch motor is advantageous for prototyping due to its simple manufacturing process. The cPAM exhibits superior bending behavior and produces the highest forces, while the fPAM actuates fastest and everts at the lowest pressure. We evaluated a similar range of dimensions for each actuator type. Larger actuators can produce more significant deformations and forces, but smaller actuators inflate more quickly and require a lower eversion pressure. Since vine robots are lightweight, the effect of gravity on the functionality of different actuators is minimal. We developed a new analytical model that predicts the pressure-to-bending behavior of vine robot actuators. Using the actuator results, we designed and demonstrated a 4.8 m long vine robot equipped with highly maneuverable 60x60 mm cPAMs in a three-dimensional obstacle course. The vine robot was able to move around sharp turns, travel through a passage smaller than its diameter, and lift itself against gravity.
A Multi-Segment, Soft Growing Robot with Selective Steering
Dec 07, 2022



Everting, soft growing vine robots benefit from reduced friction with their environment, which allows them to navigate challenging terrain. Vine robots can use air pouches attached to their sides for lateral steering. However, when all pouches are serially connected, the whole robot can only perform one constant curvature in free space. It must contact the environment to navigate through obstacles along paths with multiple turns. This work presents a multi-segment vine robot that can navigate complex paths without interacting with its environment. This is achieved by a new steering method that selectively actuates each single pouch at the tip, providing high degrees of freedom with few control inputs. A small magnetic valve connects each pouch to a pressure supply line. A motorized tip mount uses an interlocking mechanism and motorized rollers on the outer material of the vine robot. As each valve passes through the tip mount, a permanent magnet inside the tip mount opens the valve so the corresponding pouch is connected to the pressure supply line at the same moment. Novel cylindrical pneumatic artificial muscles (cPAMs) are integrated into the vine robot and inflate to a cylindrical shape for improved bending characteristics compared to other state-of-the art vine robots. The motorized tip mount controls a continuous eversion speed and enables controlled retraction. A final prototype was able to repeatably grow into different shapes and hold these shapes. We predict the path using a model that assumes a piecewise constant curvature along the outside of the multi-segment vine robot. The proposed multi-segment steering method can be extended to other soft continuum robot designs.