 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeRoBoa: Construction and Evaluation of a Steerable Vine Robot for Search and Rescue Applications
Mar 28, 2022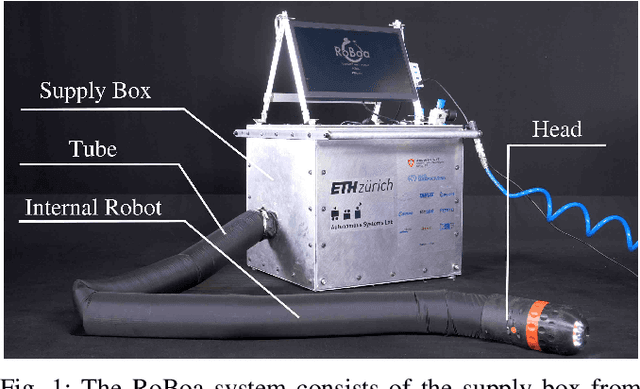
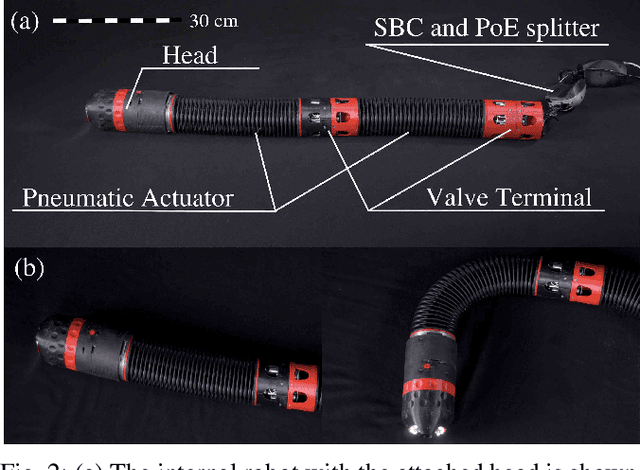
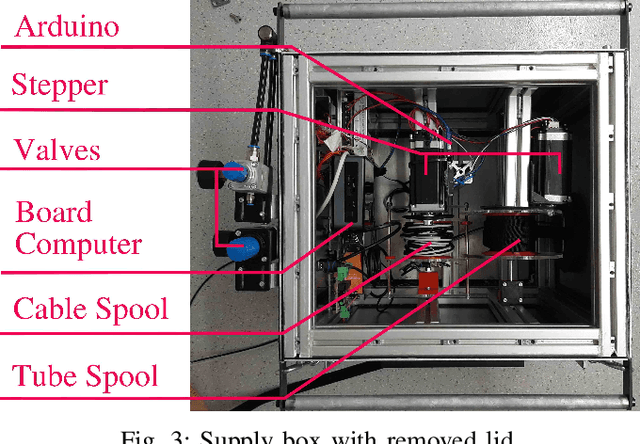
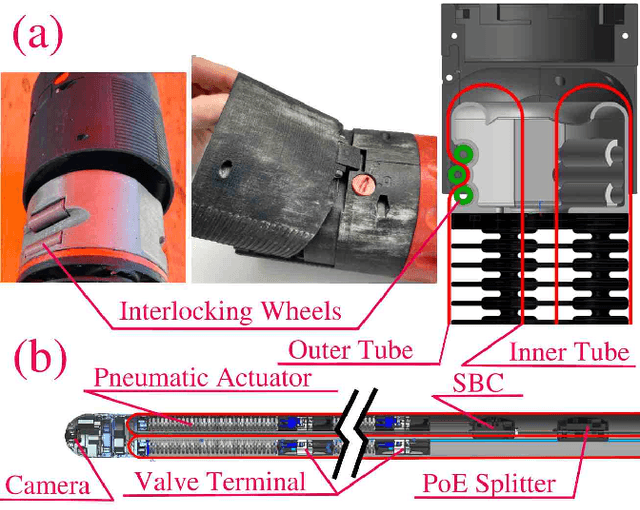
RoBoa is a vine-like search and rescue robot that can explore narrow and cluttered environments such as destroyed buildings. The robot assists rescue teams in finding and communicating with trapped people. It employs the principle of vine robots for locomotion, everting the tip of its tube to move forward. Inside the tube, pneumatic actuators enable lateral movement. The head carries sensors and is mounted outside at the tip of the tube. At the back, a supply box contains the rolled up tube and provides pressurized air, power, computation, as well as an interface for the user to interact with the system. A decentralized control scheme was implemented that reduces the required number of cables and takes care of the low-level control of the pneumatic actuators. The design, characterization, and experimental evaluation of the system and its crucial components is shown. The complete prototype is fully functional and was evaluated in a realistic environment of a collapsed building where the remote-controlled robot was able to repeatedly locate a trapped person after a travel distance of about 10 m.
* 6 pages, 5 figures, 2021 IEEE 4th International Conference on Soft Robotics (RoboSoft). For associated video, see this https://www.youtube.com/watch?v=W6wlZ9kaUvo