 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAutonomous Active Mapping in Steep Alpine Environments with Fixed-wing Aerial Vehicles
May 03, 2024



Monitoring large scale environments is a crucial task for managing remote alpine environments, especially for hazardous events such as avalanches. One key information for avalanche risk forecast is imagery of released avalanches. As these happen in remote and potentially dangerous locations this data is difficult to obtain. Fixed-wing vehicles, due to their long range and travel speeds are a promising platform to gather aerial imagery to map avalanche activities. However, operating such vehicles in mountainous terrain remains a challenge due to the complex topography, regulations, and uncertain environment. In this work, we present a system that is capable of safely navigating and mapping an avalanche using a fixed-wing aerial system and discuss the challenges arising when executing such a mission. We show in our field experiments that we can effectively navigate in steep terrain environments while maximizing the map quality. We expect our work to enable more autonomous operations of fixed-wing vehicles in alpine environments to maximize the quality of the data gathered.
Energy-Optimized Planning in Non-Uniform Wind Fields with Fixed-Wing Aerial Vehicles
Apr 02, 2024



Fixed-wing small uncrewed aerial vehicles (sUAVs) possess the capability to remain airborne for extended durations and traverse vast distances. However, their operation is susceptible to wind conditions, particularly in regions of complex terrain where high wind speeds may push the aircraft beyond its operational limitations, potentially raising safety concerns. Moreover, wind impacts the energy required to follow a path, especially in locations where the wind direction and speed are not favorable. Incorporating wind information into mission planning is essential to ensure both safety and energy efficiency. In this paper, we propose a sampling-based planner using the kinematic Dubins aircraft paths with respect to the ground, to plan energy-efficient paths in non-uniform wind fields. We study the planner characteristics with synthetic and real-world wind data and compare its performance against baseline cost and path formulations. We demonstrate that the energy-optimized planner effectively utilizes updrafts to minimize energy consumption, albeit at the expense of increased travel time. The ground-relative path formulation facilitates the generation of safe trajectories onboard sUAVs within reasonable computational timeframes.
WindSeer: Real-time volumetric wind prediction over complex terrain aboard a small UAV
Jan 18, 2024


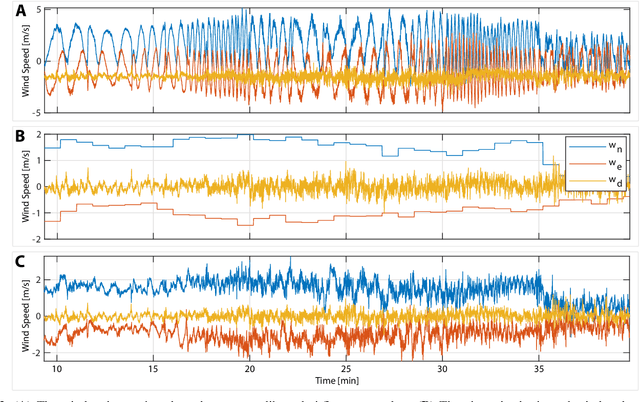
Real-time high-resolution wind predictions are beneficial for various applications including safe manned and unmanned aviation. Current weather models require too much compute and lack the necessary predictive capabilities as they are valid only at the scale of multiple kilometers and hours - much lower spatial and temporal resolutions than these applications require. Our work, for the first time, demonstrates the ability to predict low-altitude wind in real-time on limited-compute devices, from only sparse measurement data. We train a neural network, WindSeer, using only synthetic data from computational fluid dynamics simulations and show that it can successfully predict real wind fields over terrain with known topography from just a few noisy and spatially clustered wind measurements. WindSeer can generate accurate predictions at different resolutions and domain sizes on previously unseen topography without retraining. We demonstrate that the model successfully predicts historical wind data collected by weather stations and wind measured onboard drones.
Safe Low-Altitude Navigation in Steep Terrain with Fixed-Wing Aerial Vehicles
Jan 09, 2024



Fixed-wing aerial vehicles provide an efficient way to navigate long distances or cover large areas for environmental monitoring applications. By design, they also require large open spaces due to limited maneuverability. However, strict regulatory and safety altitude limits constrain the available space. Especially in complex, confined, or steep terrain, ensuring the vehicle does not enter an inevitable collision state(ICS) can be challenging. In this work, we propose a strategy to find safe paths that do not enter an ICS while navigating within tight altitude constraints. The method uses periodic paths to efficiently classify ICSs. A sampling-based planner creates collision-free and kinematically feasible paths that begin and end in safe periodic (circular) paths. We show that, in realistic terrain, using circular periodic paths can simplify the goal selection process by making it yaw agnostic and constraining yaw. We demonstrate our approach by dynamically planning safe paths in real-time while navigating steep terrain on a flight test in complex alpine terrain.
RoBoa: Construction and Evaluation of a Steerable Vine Robot for Search and Rescue Applications
Mar 28, 2022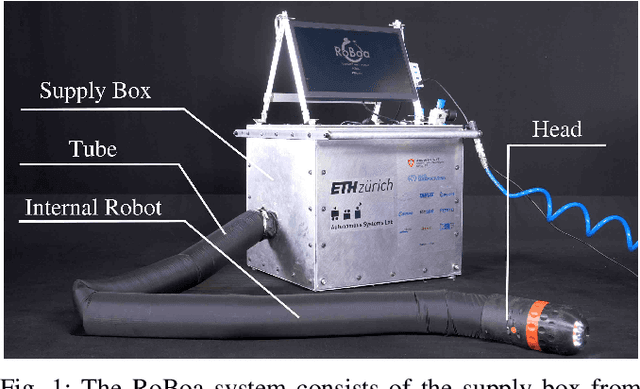
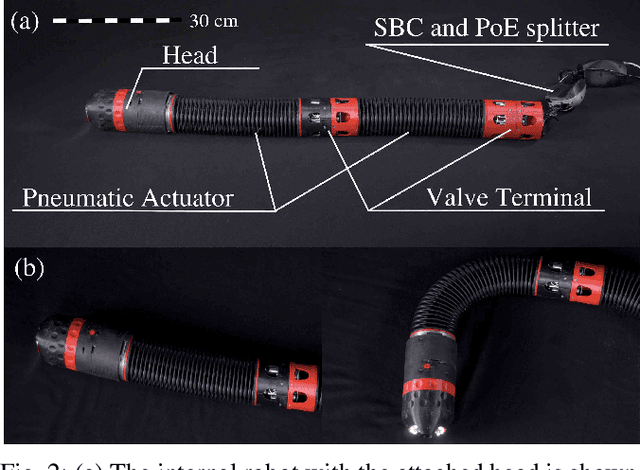
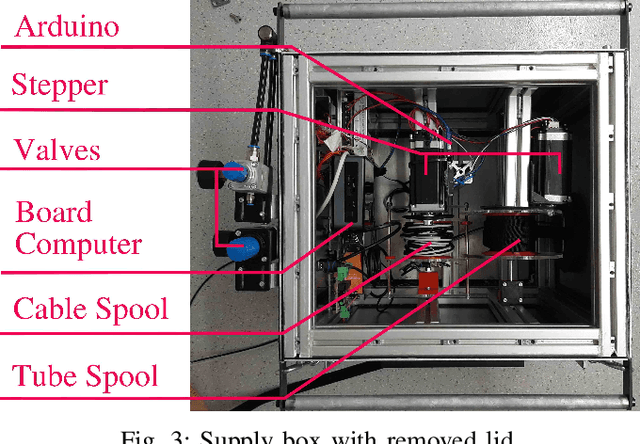
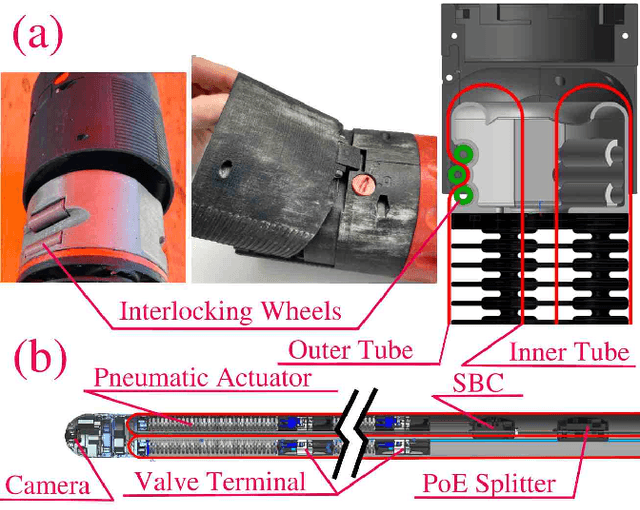
RoBoa is a vine-like search and rescue robot that can explore narrow and cluttered environments such as destroyed buildings. The robot assists rescue teams in finding and communicating with trapped people. It employs the principle of vine robots for locomotion, everting the tip of its tube to move forward. Inside the tube, pneumatic actuators enable lateral movement. The head carries sensors and is mounted outside at the tip of the tube. At the back, a supply box contains the rolled up tube and provides pressurized air, power, computation, as well as an interface for the user to interact with the system. A decentralized control scheme was implemented that reduces the required number of cables and takes care of the low-level control of the pneumatic actuators. The design, characterization, and experimental evaluation of the system and its crucial components is shown. The complete prototype is fully functional and was evaluated in a realistic environment of a collapsed building where the remote-controlled robot was able to repeatedly locate a trapped person after a travel distance of about 10 m.
* 6 pages, 5 figures, 2021 IEEE 4th International Conference on Soft Robotics (RoboSoft). For associated video, see this https://www.youtube.com/watch?v=W6wlZ9kaUvo
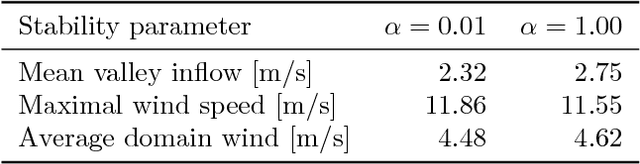
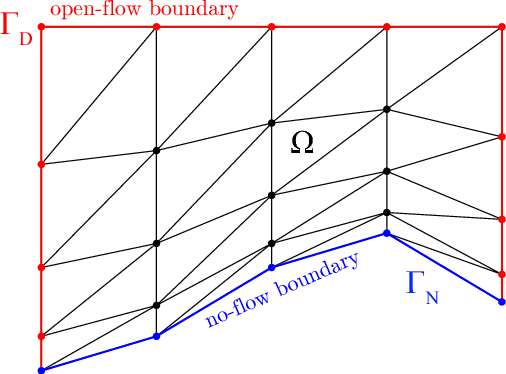
Towards Fully Environment-Aware UAVs: Real-Time Path Planning with Online 3D Wind Field Prediction in Complex Terrain
Dec 10, 2017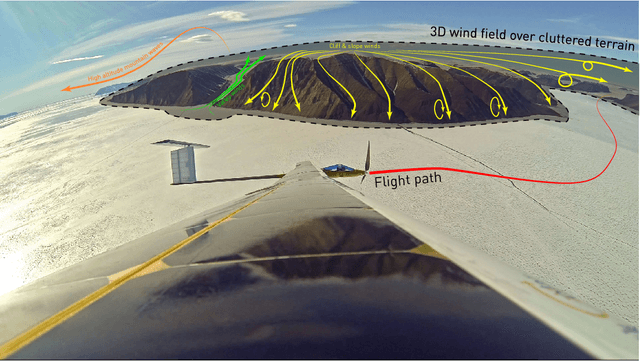
Today, low-altitude fixed-wing Unmanned Aerial Vehicles (UAVs) are largely limited to primitively follow user-defined waypoints. To allow fully-autonomous remote missions in complex environments, real-time environment-aware navigation is required both with respect to terrain and strong wind drafts. This paper presents two relevant initial contributions: First, the literature's first-ever 3D wind field prediction method which can run in real time onboard a UAV is presented. The approach retrieves low-resolution global weather data, and uses potential flow theory to adjust the wind field such that terrain boundaries, mass conservation, and the atmospheric stratification are observed. A comparison with 1D LIDAR data shows an overall wind error reduction of 23% with respect to the zero-wind assumption that is mostly used for UAV path planning today. However, given that the vertical winds are not resolved accurately enough further research is required and identified. Second, a sampling-based path planner that considers the aircraft dynamics in non-uniform wind iteratively via Dubins airplane paths is presented. Performance optimizations, e.g. obstacle-aware sampling and fast 2.5D-map collision checks, render the planner 50% faster than the Open Motion Planning Library (OMPL) implementation. Test cases in Alpine terrain show that the wind-aware planning performs up to 50x less iterations than shortest-path planning and is thus slower in low winds, but that it tends to deliver lower-cost paths in stronger winds. More importantly, in contrast to the shortest-path planner, it always delivers collision-free paths. Overall, our initial research demonstrates the feasibility of 3D wind field prediction from a UAV and the advantages of wind-aware planning. This paves the way for follow-up research on fully-autonomous environment-aware navigation of UAVs in real-life missions and complex terrain.