 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeTowards Fully Environment-Aware UAVs: Real-Time Path Planning with Online 3D Wind Field Prediction in Complex Terrain
Dec 10, 2017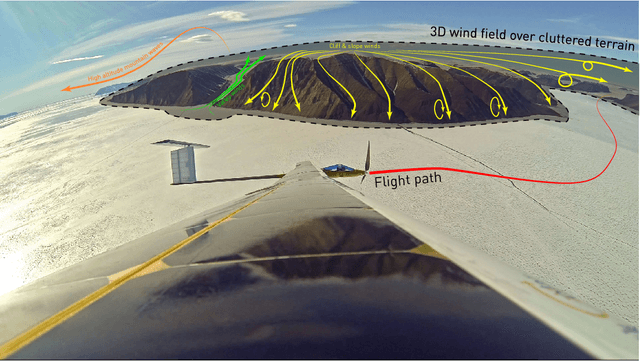
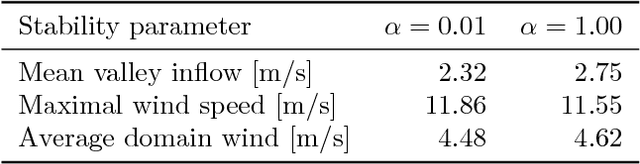
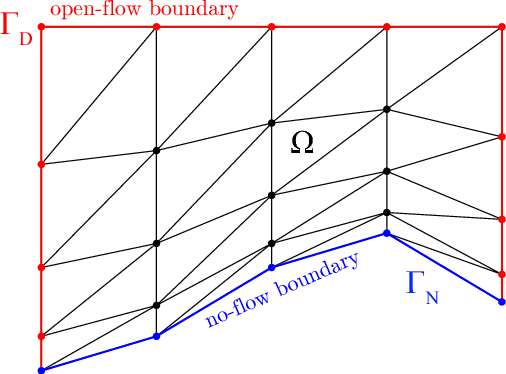
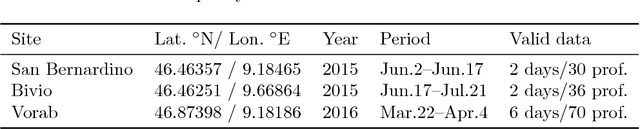
Today, low-altitude fixed-wing Unmanned Aerial Vehicles (UAVs) are largely limited to primitively follow user-defined waypoints. To allow fully-autonomous remote missions in complex environments, real-time environment-aware navigation is required both with respect to terrain and strong wind drafts. This paper presents two relevant initial contributions: First, the literature's first-ever 3D wind field prediction method which can run in real time onboard a UAV is presented. The approach retrieves low-resolution global weather data, and uses potential flow theory to adjust the wind field such that terrain boundaries, mass conservation, and the atmospheric stratification are observed. A comparison with 1D LIDAR data shows an overall wind error reduction of 23% with respect to the zero-wind assumption that is mostly used for UAV path planning today. However, given that the vertical winds are not resolved accurately enough further research is required and identified. Second, a sampling-based path planner that considers the aircraft dynamics in non-uniform wind iteratively via Dubins airplane paths is presented. Performance optimizations, e.g. obstacle-aware sampling and fast 2.5D-map collision checks, render the planner 50% faster than the Open Motion Planning Library (OMPL) implementation. Test cases in Alpine terrain show that the wind-aware planning performs up to 50x less iterations than shortest-path planning and is thus slower in low winds, but that it tends to deliver lower-cost paths in stronger winds. More importantly, in contrast to the shortest-path planner, it always delivers collision-free paths. Overall, our initial research demonstrates the feasibility of 3D wind field prediction from a UAV and the advantages of wind-aware planning. This paves the way for follow-up research on fully-autonomous environment-aware navigation of UAVs in real-life missions and complex terrain.
Meteorology-Aware Multi-Goal Path Planning for Large-Scale Inspection Missions with Long-Endurance Solar-Powered Aircraft
Nov 28, 2017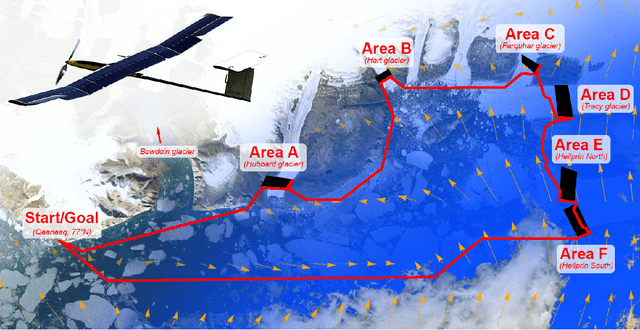
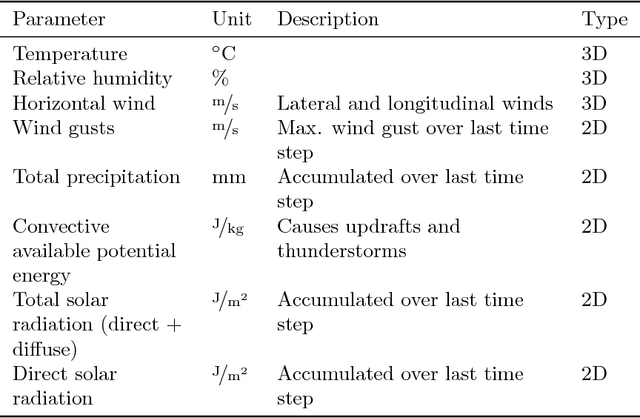
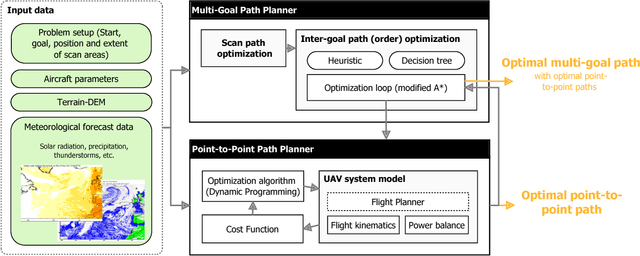
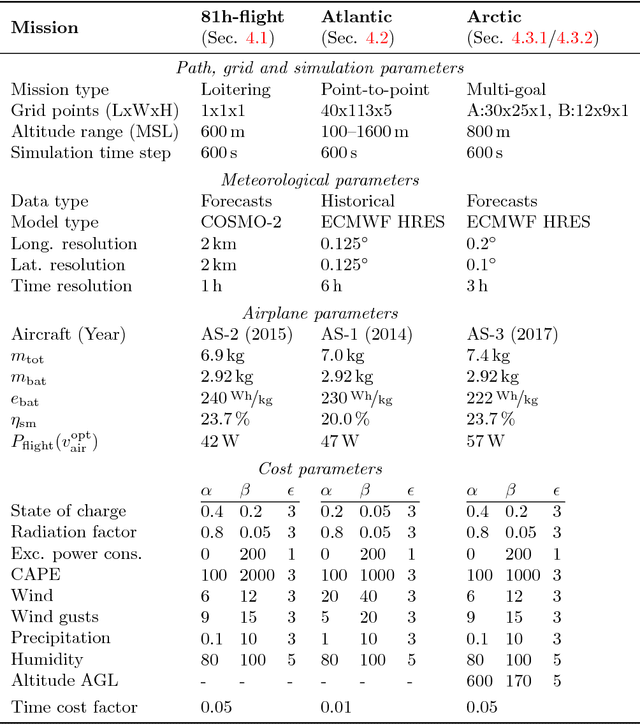
Solar-powered aircraft promise significantly increased flight endurance over conventional aircraft. While this makes them promising candidates for large-scale aerial inspection missions, their structural fragility necessitates that adverse weather is avoided using appropriate path planning methods. This paper therefore presents MetPASS, the Meteorology-aware Path Planning and Analysis Software for Solar-powered UAVs. MetPASS is the first path planning framework in the literature that considers all aspects that influence the safety or performance of solar-powered flight: It avoids environmental risks (thunderstorms, rain, wind, wind gusts and humidity) and exploits advantageous regions (high sun radiation or tailwind). It also avoids system risks such as low battery state of charge and returns safe paths through cluttered terrain. MetPASS imports weather data from global meteorological models, propagates the aircraft state through an energetic system model, and then combines both into a cost function. A combination of dynamic programming techniques and an A*-search-algorithm with a custom heuristic is leveraged to plan globally optimal paths in station-keeping, point-to-point or multi-goal aerial inspection missions with coverage guarantees. A full software implementation including a GUI is provided. The planning methods are verified using three missions of ETH Zurich's AtlantikSolar UAV: An 81-hour continuous solar-powered station-keeping flight, a 4000km Atlantic crossing from Newfoundland to Portugal, and two multi-glacier aerial inspection missions above the Arctic Ocean performed near Greenland in summer 2017.
High-Fidelity Solar Power Income Modeling for Solar-Electric UAVs: Development and Flight Test Based Verification
Mar 21, 2017

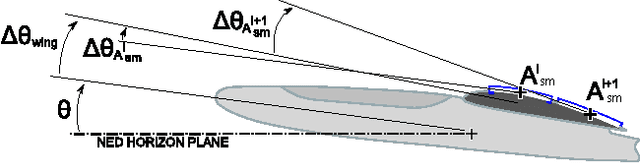

Solar power models are a crucial element of solar-powered UAV design and performance analysis. During the conceptual design phase, their accuracy directly relates to the accuracy of the predicted performance metrics and thus the final design characteristics of the solar-powered UAV. Likewise, during the operations phase of a solar-powered UAV accurate solar power income models are required to predict and assess the solar power system performance. However, the existing literature on solar-powered UAVs uses highly simplified solar power models. This technical report therefore, first, introduces a high-fidelity solar power model that takes into account the exact aircraft attitude, aircraft geometry, and physical effects such as temperature and the sun radiation's angle-of-incidence that influence the overall solar power system efficiency. Second, models that require a reduced set of input data and are thus more appropriate for the initial design phase of solar-powered UAVs are derived from the high-fidelity model. Third, the models are compared and verified against flight data from a 28-hour continuous day/night solar-powered flight. The results indicate that our high-fidelity model allows a prediction of the average solar power income with an error of less than 5% whereas previous models were only accurate to about 18%.