 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAutonomous Extension of a Symbolic Mobile Manipulation Skill Set
Paper and Code
Oct 20, 2020
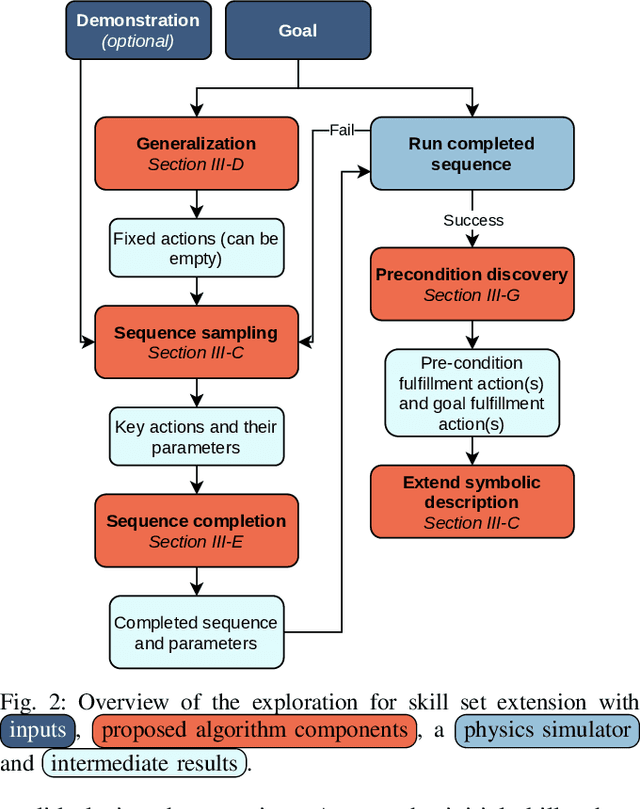
Today's methods of programming mobile manipulation systems' behavior for operating in unstructured environments do not generalize well to unseen tasks or changes in the environment not anticipated at design time. Although symbolic planning makes this task more accessible to non-expert users by allowing a user to specify a desired goal, it reaches its limits when a task or the current environment is not soundly represented by the abstract domain or problem description. We propose a method that allows an agent to autonomously extend its skill set and thus the abstract description upon encountering such a situation. For this, we combine a set of four basic skills (grasp, place, navigate, move) with an off-the-shelf symbolic planner upon which we base a skill sequence exploration scheme. To make the search over skill sequences more efficient and effective, we introduce strategies for generalizing from previous experience, completing sequences of key skills and discovering preconditions. The resulting system is evaluated in simulation using object rearrangement tasks. We can show qualitatively that the skill set extension works as expected and quantitatively that our strategies for more efficient search make the approach computationally tractable.