 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDesign and Evaluation of an Assisted Programming Interface for Behavior Trees in Robotics
Feb 10, 2026The possibility to create reactive robot programs faster without the need for extensively trained programmers is becoming increasingly important. So far, it has not been explored how various techniques for creating Behavior Tree (BT) program representations could be combined with complete graphical user interfaces (GUIs) to allow a human user to validate and edit trees suggested by automated methods. In this paper, we introduce BEhavior TRee GUI (BETR-GUI) for creating BTs with the help of an AI assistant that combines methods using large language models, planning, genetic programming, and Bayesian optimization with a drag-and-drop editor. A user study with 60 participants shows that by combining different assistive methods, BETR-GUI enables users to perform better at solving the robot programming tasks. The results also show that humans using the full variant of BETR-GUI perform better than the AI assistant running on its own.
Design and Integration of Thermal and Vibrotactile Feedback for Lifelike Touch in Social Robots
Dec 19, 2025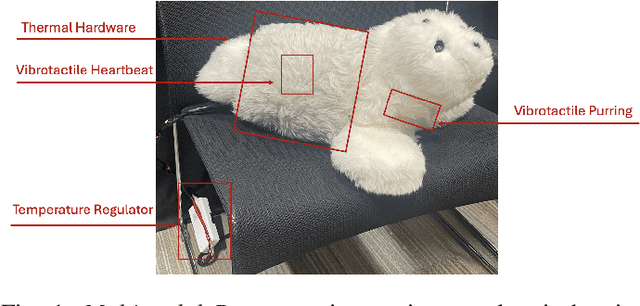
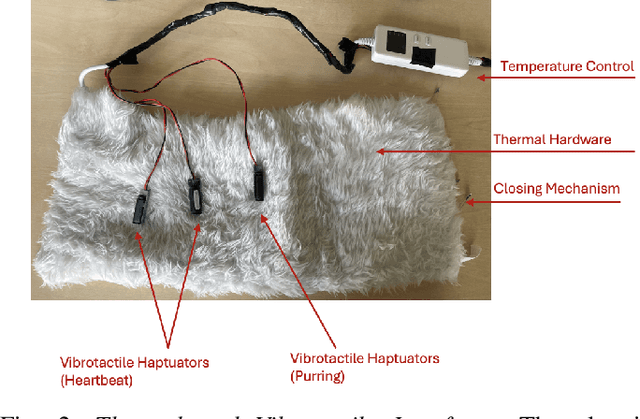
Zoomorphic Socially Assistive Robots (SARs) offer an alternative source of social touch for individuals who cannot access animal companionship. However, current SARs provide only limited, passive touch-based interactions and lack the rich haptic cues, such as warmth, heartbeat or purring, that are characteristic of human-animal touch. This limits their ability to evoke emotionally engaging, life-like physical interactions. We present a multimodal tactile prototype, which was used to augment the established PARO robot, integrating thermal and vibrotactile feedback to simulate feeling biophysiological signals. A flexible heating interface delivers body-like warmth, while embedded actuators generate heartbeat-like rhythms and continuous purring sensations. These cues were iteratively designed and calibrated with input from users and haptics experts. We outline the design process and offer reproducible guidelines to support the development of emotionally resonant and biologically plausible touch interactions with SARs.
The First WARA Robotics Mobile Manipulation Challenge -- Lessons Learned
May 11, 2025The first WARA Robotics Mobile Manipulation Challenge, held in December 2024 at ABB Corporate Research in V\"aster{\aa}s, Sweden, addressed the automation of task-intensive and repetitive manual labor in laboratory environments - specifically the transport and cleaning of glassware. Designed in collaboration with AstraZeneca, the challenge invited academic teams to develop autonomous robotic systems capable of navigating human-populated lab spaces and performing complex manipulation tasks, such as loading items into industrial dishwashers. This paper presents an overview of the challenge setup, its industrial motivation, and the four distinct approaches proposed by the participating teams. We summarize lessons learned from this edition and propose improvements in design to enable a more effective second iteration to take place in 2025. The initiative bridges an important gap in effective academia-industry collaboration within the domain of autonomous mobile manipulation systems by promoting the development and deployment of applied robotic solutions in real-world laboratory contexts.
Towards Autonomous Reinforcement Learning for Real-World Robotic Manipulation with Large Language Models
Mar 07, 2025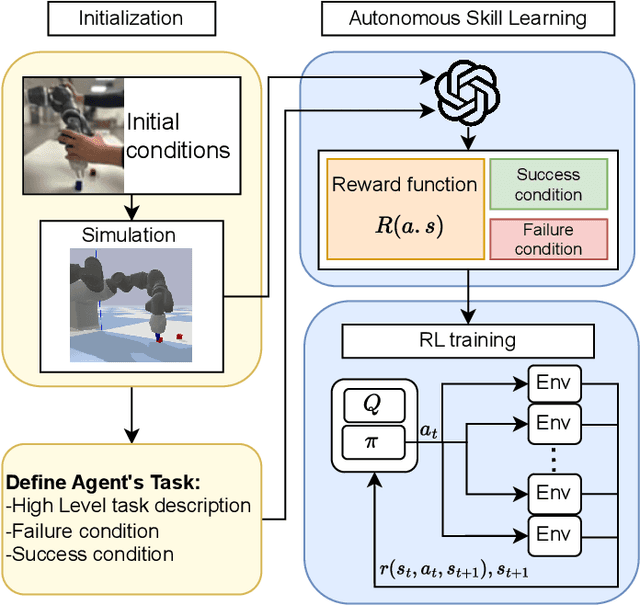
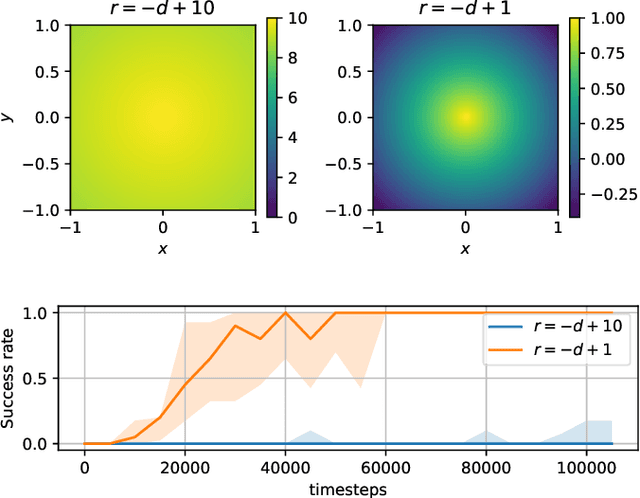
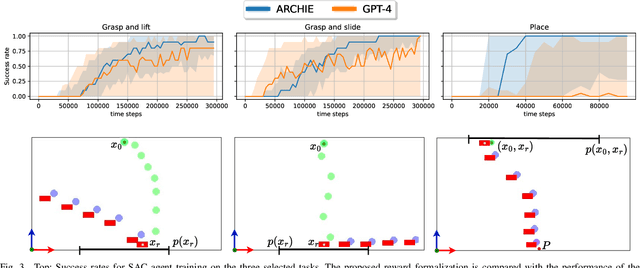
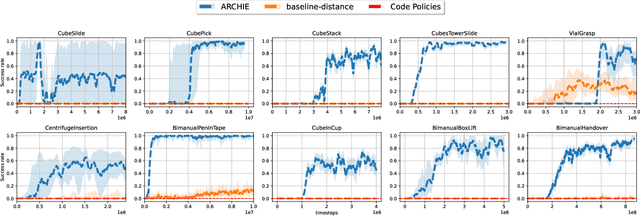
Recent advancements in Large Language Models (LLMs) and Visual Language Models (VLMs) have significantly impacted robotics, enabling high-level semantic motion planning applications. Reinforcement Learning (RL), a complementary paradigm, enables agents to autonomously optimize complex behaviors through interaction and reward signals. However, designing effective reward functions for RL remains challenging, especially in real-world tasks where sparse rewards are insufficient and dense rewards require elaborate design. In this work, we propose Autonomous Reinforcement learning for Complex HumanInformed Environments (ARCHIE), an unsupervised pipeline leveraging GPT-4, a pre-trained LLM, to generate reward functions directly from natural language task descriptions. The rewards are used to train RL agents in simulated environments, where we formalize the reward generation process to enhance feasibility. Additionally, GPT-4 automates the coding of task success criteria, creating a fully automated, one-shot procedure for translating human-readable text into deployable robot skills. Our approach is validated through extensive simulated experiments on single-arm and bi-manual manipulation tasks using an ABB YuMi collaborative robot, highlighting its practicality and effectiveness. Tasks are demonstrated on the real robot setup.
Comparison between Behavior Trees and Finite State Machines
May 25, 2024



Behavior Trees (BTs) were first conceived in the computer games industry as a tool to model agent behavior, but they received interest also in the robotics community as an alternative policy design to Finite State Machines (FSMs). The advantages of BTs over FSMs had been highlighted in many works, but there is no thorough practical comparison of the two designs. Such a comparison is particularly relevant in the robotic industry, where FSMs have been the state-of-the-art policy representation for robot control for many years. In this work we shed light on this matter by comparing how BTs and FSMs behave when controlling a robot in a mobile manipulation task. The comparison is made in terms of reactivity, modularity, readability, and design. We propose metrics for each of these properties, being aware that while some are tangible and objective, others are more subjective and implementation dependent. The practical comparison is performed in a simulation environment with validation on a real robot. We find that although the robot's behavior during task solving is independent on the policy representation, maintaining a BT rather than an FSM becomes easier as the task increases in complexity.
Behavior Trees in Industrial Applications: A Case Study in Underground Explosive Charging
Mar 28, 2024



In industrial applications Finite State Machines (FSMs) are often used to implement decision making policies for autonomous systems. In recent years, the use of Behavior Trees (BT) as an alternative policy representation has gained considerable attention. The benefits of using BTs over FSMs are modularity and reusability, enabling a system that is easy to extend and modify. However, there exists few published studies on successful implementations of BTs for industrial applications. This paper contributes with the lessons learned from implementing BTs in a complex industrial use case, where a robotic system assembles explosive charges and places them in holes on the rock face. The main result of the paper is that even if it is possible to model the entire system as a BT, combining BTs with FSMs can increase the readability and maintainability of the system. The benefit of such combination is remarked especially in the use case studied in this paper, where the full system cannot run autonomously but human supervision and feedback are needed.
A Framework for Learning Behavior Trees in Collaborative Robotic Applications
Mar 20, 2023



In modern industrial collaborative robotic applications, it is desirable to create robot programs automatically, intuitively, and time-efficiently. Moreover, robots need to be controlled by reactive policies to face the unpredictability of the environment they operate in. In this paper we propose a framework that combines a method that learns Behavior Trees (BTs) from demonstration with a method that evolves them with Genetic Programming (GP) for collaborative robotic applications. The main contribution of this paper is to show that by combining the two learning methods we obtain a method that allows non-expert users to semi-automatically, time-efficiently, and interactively generate BTs. We validate the framework with a series of manipulation experiments. The BT is fully learnt in simulation and then transferred to a real collaborative robot.
Behavior Trees for Robust Task Level Control in Robotic Applications
Jan 16, 2023Behavior Trees are a task switching policy representation that can grant reactiveness and fault tolerance. Moreover, because of their structure and modularity, a variety of methods can be used to generate them automatically. In this short paper we introduce Behavior Trees in the context of robotic applications, with overview of autonomous synthesis methods.
On the programming effort required to generate Behavior Trees and Finite State Machines for robotic applications
Sep 15, 2022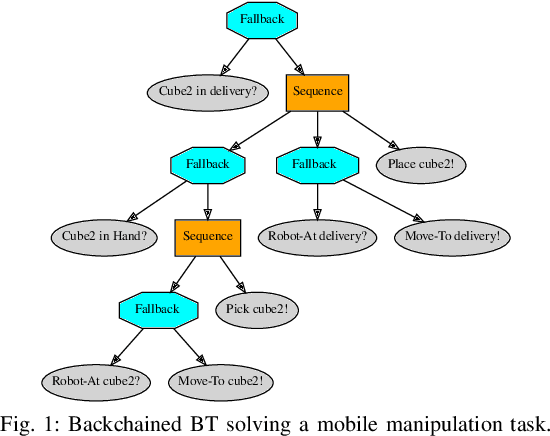
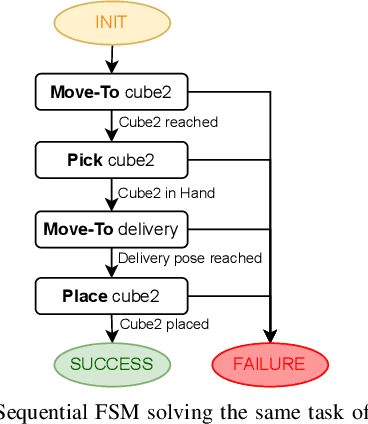
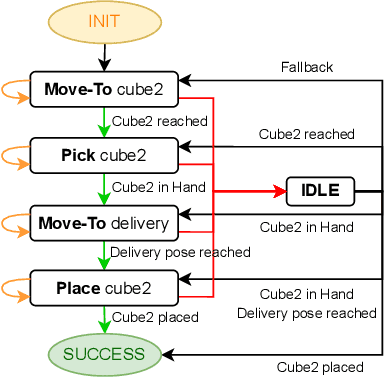
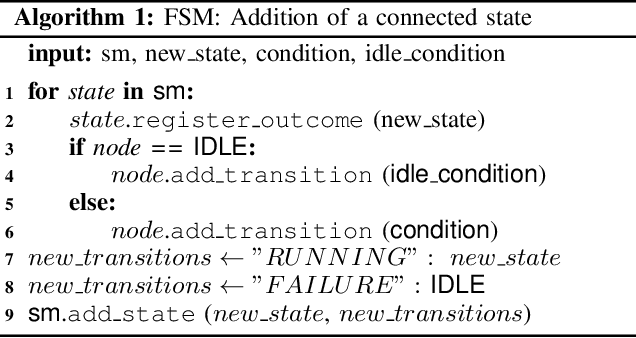
In this paper we provide a practical demonstration of how the modularity in a Behavior Tree (BT) decreases the effort in programming a robot task when compared to a Finite State Machine (FSM). In recent years the way to represent a task plan to control an autonomous agent has been shifting from the standard FSM towards BTs. Many works in the literature have highlighted and proven the benefits of such design compared to standard approaches, especially in terms of modularity, reactivity and human readability. However, these works have often failed in providing a tangible comparison in the implementation of those policies and the programming effort required to modify them. This is a relevant aspect in many robotic applications, where the design choice is dictated both by the robustness of the policy and by the time required to program it. In this work, we compare backward chained BTs with a fault-tolerant design of FSMs by evaluating the cost to modify them. We validate the analysis with a set of experiments in a simulation environment where a mobile manipulator solves an item fetching task.
Interactive Disambiguation for Behavior Tree Execution
Mar 10, 2022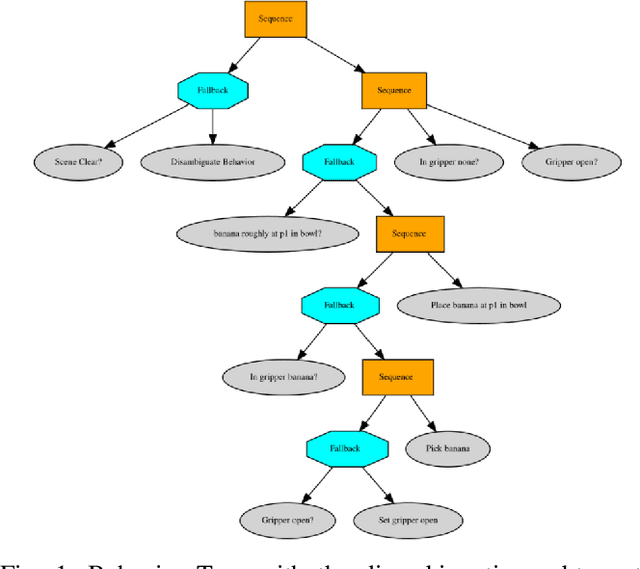
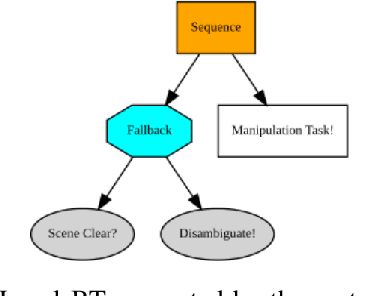
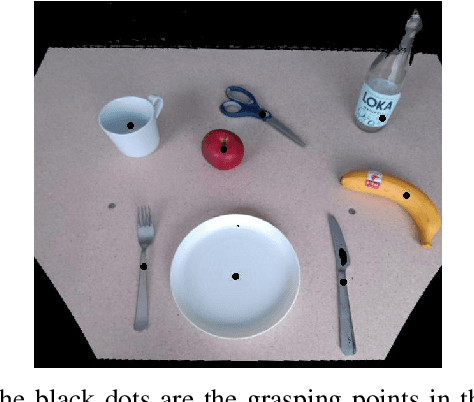
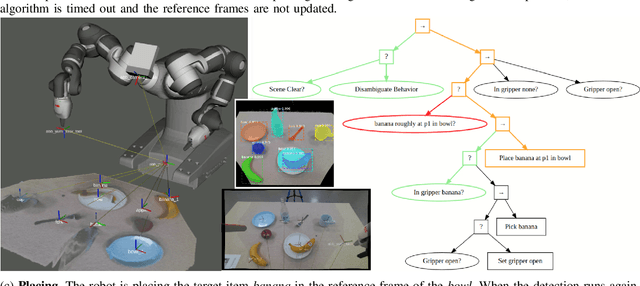
In recent years, robots are used in an increasing variety of tasks, especially by small- and medium- sized enterprises. These tasks are usually fast-changing, they have a collaborative scenario and happen in unpredictable environments with possible ambiguities. It is important to have methods capable of generating robot programs easily, that are made as general as possible by handling uncertainties. We present a system that integrates a method to learn Behavior Trees (BTs) from demonstration for pick and place tasks, with a framework that uses verbal interaction to ask follow-up clarification questions to resolve ambiguities. During the execution of a task, the system asks for user input when there is need to disambiguate an object in the scene, when the targets of the task are objects of a same type that are present in multiple instances. The integrated system is demonstrated on different scenarios of a pick and place task, with increasing level of ambiguities. The code used for this paper is made publicly available.