 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeCan Context Bridge the Reality Gap? Sim-to-Real Transfer of Context-Aware Policies
Nov 06, 2025Sim-to-real transfer remains a major challenge in reinforcement learning (RL) for robotics, as policies trained in simulation often fail to generalize to the real world due to discrepancies in environment dynamics. Domain Randomization (DR) mitigates this issue by exposing the policy to a wide range of randomized dynamics during training, yet leading to a reduction in performance. While standard approaches typically train policies agnostic to these variations, we investigate whether sim-to-real transfer can be improved by conditioning the policy on an estimate of the dynamics parameters -- referred to as context. To this end, we integrate a context estimation module into a DR-based RL framework and systematically compare SOTA supervision strategies. We evaluate the resulting context-aware policies in both a canonical control benchmark and a real-world pushing task using a Franka Emika Panda robot. Results show that context-aware policies outperform the context-agnostic baseline across all settings, although the best supervision strategy depends on the task.
The First WARA Robotics Mobile Manipulation Challenge -- Lessons Learned
May 11, 2025The first WARA Robotics Mobile Manipulation Challenge, held in December 2024 at ABB Corporate Research in V\"aster{\aa}s, Sweden, addressed the automation of task-intensive and repetitive manual labor in laboratory environments - specifically the transport and cleaning of glassware. Designed in collaboration with AstraZeneca, the challenge invited academic teams to develop autonomous robotic systems capable of navigating human-populated lab spaces and performing complex manipulation tasks, such as loading items into industrial dishwashers. This paper presents an overview of the challenge setup, its industrial motivation, and the four distinct approaches proposed by the participating teams. We summarize lessons learned from this edition and propose improvements in design to enable a more effective second iteration to take place in 2025. The initiative bridges an important gap in effective academia-industry collaboration within the domain of autonomous mobile manipulation systems by promoting the development and deployment of applied robotic solutions in real-world laboratory contexts.
On the Fly Adaptation of Behavior Tree-Based Policies through Reinforcement Learning
Mar 08, 2025With the rising demand for flexible manufacturing, robots are increasingly expected to operate in dynamic environments where local -- such as slight offsets or size differences in workpieces -- are common. We propose to address the problem of adapting robot behaviors to these task variations with a sample-efficient hierarchical reinforcement learning approach adapting Behavior Tree (BT)-based policies. We maintain the core BT properties as an interpretable, modular framework for structuring reactive behaviors, but extend their use beyond static tasks by inherently accommodating local task variations. To show the efficiency and effectiveness of our approach, we conduct experiments both in simulation and on a Franka Emika Panda 7-DoF, with the manipulator adapting to different obstacle avoidance and pivoting tasks.
Heterogeneous Full-body Control of a Mobile Manipulator with Behavior Trees
Oct 16, 2022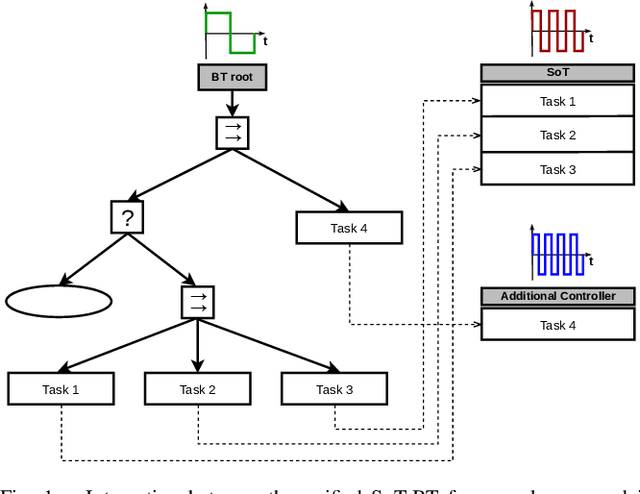
Integrating the heterogeneous controllers of a complex mechanical system, such as a mobile manipulator, within the same structure and in a modular way is still challenging. In this work we extend our framework based on Behavior Trees for the control of a redundant mechanical system to the problem of commanding more complex systems that involve multiple low-level controllers. This allows the integrated systems to achieve non-trivial goals that require coordination among the sub-systems.
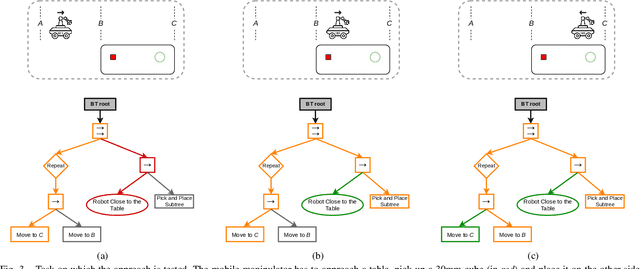
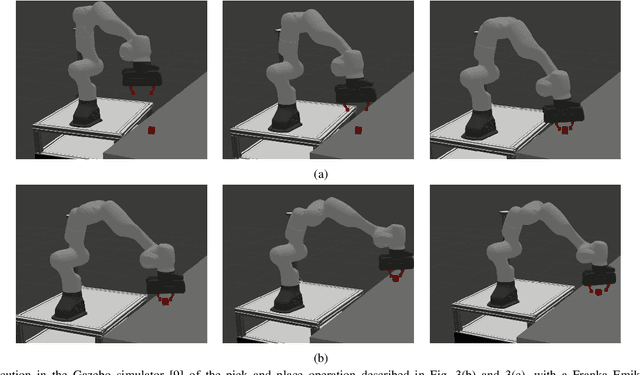
A Stack-of-Tasks Approach Combined with Behavior Trees: a New Framework for Robot Control
Sep 18, 2022
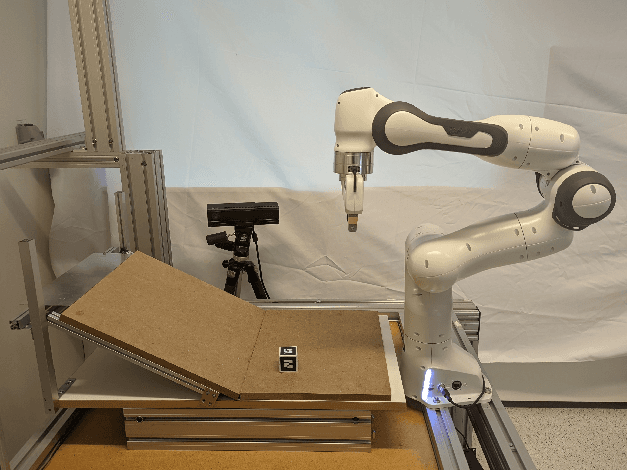

Stack-of-Tasks (SoT) control allows a robot to simultaneously fulfill a number of prioritized goals formulated in terms of (in)equality constraints in error space. Since this approach solves a sequence of Quadratic Programs (QP) at each time-step, without taking into account any temporal state evolution, it is suitable for dealing with local disturbances. However, its limitation lies in the handling of situations that require non-quadratic objectives to achieve a specific goal, as well as situations where countering the control disturbance would require a locally suboptimal action. Recent works address this shortcoming by exploiting Finite State Machines (FSMs) to compose the tasks in such a way that the robot does not get stuck in local minima. Nevertheless, the intrinsic trade-off between reactivity and modularity that characterizes FSMs makes them impractical for defining reactive behaviors in dynamic environments. In this letter, we combine the SoT control strategy with Behavior Trees (BTs), a task switching structure that addresses some of the limitations of the FSMs in terms of reactivity, modularity and re-usability. Experimental results on a Franka Emika Panda 7-DOF manipulator show the robustness of our framework, that allows the robot to benefit from the reactivity of both SoT and BTs.