 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeCombining Context Awareness and Planning to Learn Behavior Trees from Demonstration
Sep 15, 2021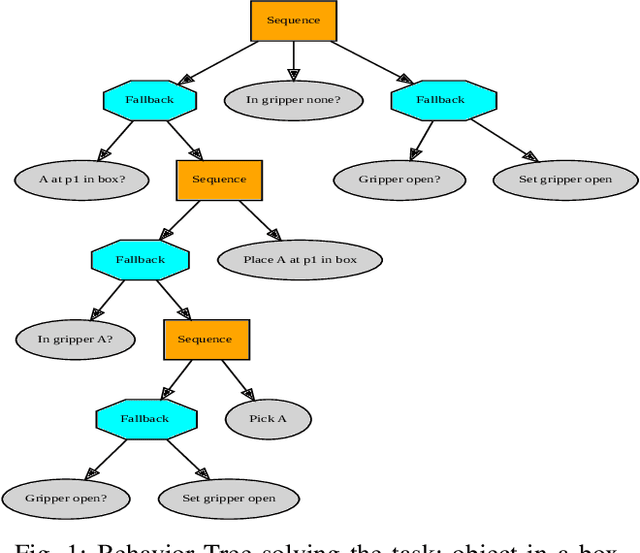
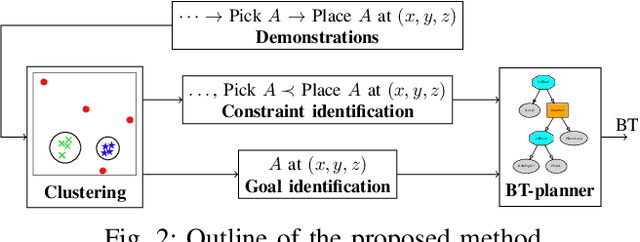
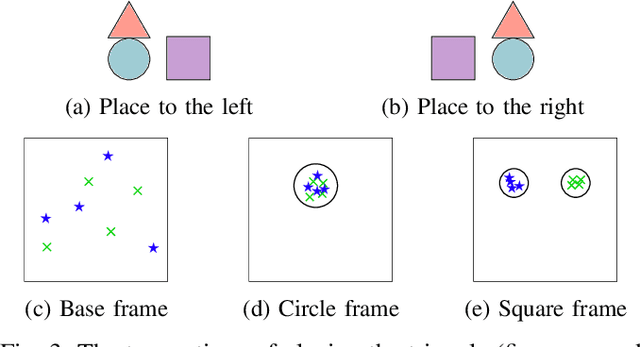
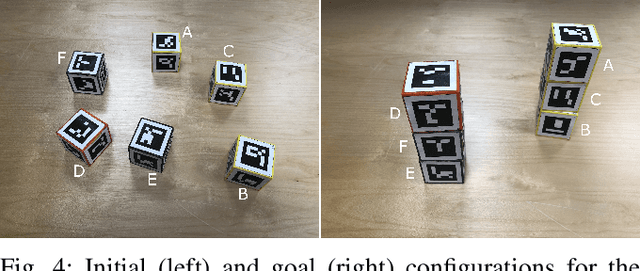
Fast changing tasks in unpredictable, collaborative environments are typical for medium-small companies, where robotised applications are increasing. Thus, robot programs should be generated in short time with small effort, and the robot able to react dynamically to the environment. To address this we propose a method that combines context awareness and planning to learn Behavior Trees (BTs), a reactive policy representation that is becoming more popular in robotics and has been used successfully in many collaborative scenarios. Context awareness allows to infer from the demonstration the frames in which actions are executed and to capture relevant aspects of the task, while a planner is used to automatically generate the BT from the sequence of actions from the demonstration. The learned BT is shown to solve non-trivial manipulation tasks where learning the context is fundamental to achieve the goal. Moreover, we collected non-expert demonstrations to study the performances of the algorithm in industrial scenarios.