 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDesign and Evaluation of an Assisted Programming Interface for Behavior Trees in Robotics
Feb 10, 2026The possibility to create reactive robot programs faster without the need for extensively trained programmers is becoming increasingly important. So far, it has not been explored how various techniques for creating Behavior Tree (BT) program representations could be combined with complete graphical user interfaces (GUIs) to allow a human user to validate and edit trees suggested by automated methods. In this paper, we introduce BEhavior TRee GUI (BETR-GUI) for creating BTs with the help of an AI assistant that combines methods using large language models, planning, genetic programming, and Bayesian optimization with a drag-and-drop editor. A user study with 60 participants shows that by combining different assistive methods, BETR-GUI enables users to perform better at solving the robot programming tasks. The results also show that humans using the full variant of BETR-GUI perform better than the AI assistant running on its own.
The First WARA Robotics Mobile Manipulation Challenge -- Lessons Learned
May 11, 2025The first WARA Robotics Mobile Manipulation Challenge, held in December 2024 at ABB Corporate Research in V\"aster{\aa}s, Sweden, addressed the automation of task-intensive and repetitive manual labor in laboratory environments - specifically the transport and cleaning of glassware. Designed in collaboration with AstraZeneca, the challenge invited academic teams to develop autonomous robotic systems capable of navigating human-populated lab spaces and performing complex manipulation tasks, such as loading items into industrial dishwashers. This paper presents an overview of the challenge setup, its industrial motivation, and the four distinct approaches proposed by the participating teams. We summarize lessons learned from this edition and propose improvements in design to enable a more effective second iteration to take place in 2025. The initiative bridges an important gap in effective academia-industry collaboration within the domain of autonomous mobile manipulation systems by promoting the development and deployment of applied robotic solutions in real-world laboratory contexts.
A Unified Framework for Real-Time Failure Handling in Robotics Using Vision-Language Models, Reactive Planner and Behavior Trees
Mar 21, 2025Robotic systems often face execution failures due to unexpected obstacles, sensor errors, or environmental changes. Traditional failure recovery methods rely on predefined strategies or human intervention, making them less adaptable. This paper presents a unified failure recovery framework that combines Vision-Language Models (VLMs), a reactive planner, and Behavior Trees (BTs) to enable real-time failure handling. Our approach includes pre-execution verification, which checks for potential failures before execution, and reactive failure handling, which detects and corrects failures during execution by verifying existing BT conditions, adding missing preconditions and, when necessary, generating new skills. The framework uses a scene graph for structured environmental perception and an execution history for continuous monitoring, enabling context-aware and adaptive failure handling. We evaluate our framework through real-world experiments with an ABB YuMi robot on tasks like peg insertion, object sorting, and drawer placement, as well as in AI2-THOR simulator. Compared to using pre-execution and reactive methods separately, our approach achieves higher task success rates and greater adaptability. Ablation studies highlight the importance of VLM-based reasoning, structured scene representation, and execution history tracking for effective failure recovery in robotics.
Addressing Failures in Robotics using Vision-Based Language Models (VLMs) and Behavior Trees (BT)
Nov 03, 2024In this paper, we propose an approach that combines Vision Language Models (VLMs) and Behavior Trees (BTs) to address failures in robotics. Current robotic systems can handle known failures with pre-existing recovery strategies, but they are often ill-equipped to manage unknown failures or anomalies. We introduce VLMs as a monitoring tool to detect and identify failures during task execution. Additionally, VLMs generate missing conditions or skill templates that are then incorporated into the BT, ensuring the system can autonomously address similar failures in future tasks. We validate our approach through simulations in several failure scenarios.
BeBOP -- Combining Reactive Planning and Bayesian Optimization to Solve Robotic Manipulation Tasks
Oct 02, 2023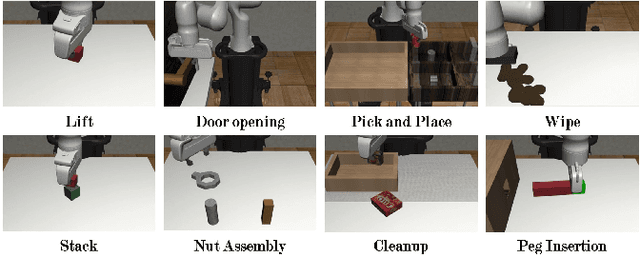
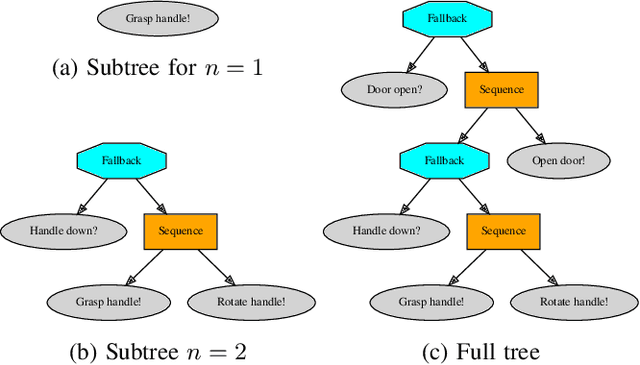
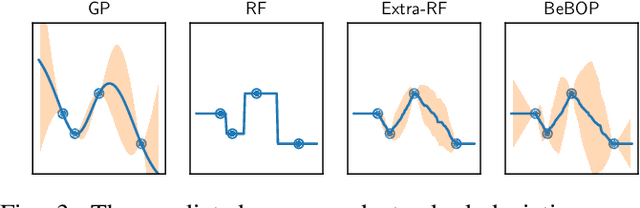
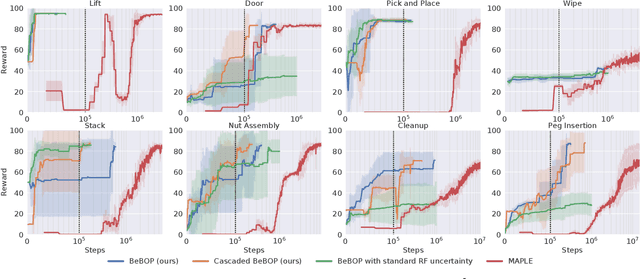
Robotic systems for manipulation tasks are increasingly expected to be easy to configure for new tasks. While in the past, robot programs were often written statically and tuned manually, the current, faster transition times call for robust, modular and interpretable solutions that also allow a robotic system to learn how to perform a task. We propose the method Behavior-based Bayesian Optimization and Planning (BeBOP) that combines two approaches for generating behavior trees: we build the structure using a reactive planner and learn specific parameters with Bayesian optimization. The method is evaluated on a set of robotic manipulation benchmarks and is shown to outperform state-of-the-art reinforcement learning algorithms by being up to 46 times faster while simultaneously being less dependent on reward shaping. We also propose a modification to the uncertainty estimate for the random forest surrogate models that drastically improves the results.
A Framework for Learning Behavior Trees in Collaborative Robotic Applications
Mar 20, 2023



In modern industrial collaborative robotic applications, it is desirable to create robot programs automatically, intuitively, and time-efficiently. Moreover, robots need to be controlled by reactive policies to face the unpredictability of the environment they operate in. In this paper we propose a framework that combines a method that learns Behavior Trees (BTs) from demonstration with a method that evolves them with Genetic Programming (GP) for collaborative robotic applications. The main contribution of this paper is to show that by combining the two learning methods we obtain a method that allows non-expert users to semi-automatically, time-efficiently, and interactively generate BTs. We validate the framework with a series of manipulation experiments. The BT is fully learnt in simulation and then transferred to a real collaborative robot.
Combining Context Awareness and Planning to Learn Behavior Trees from Demonstration
Sep 15, 2021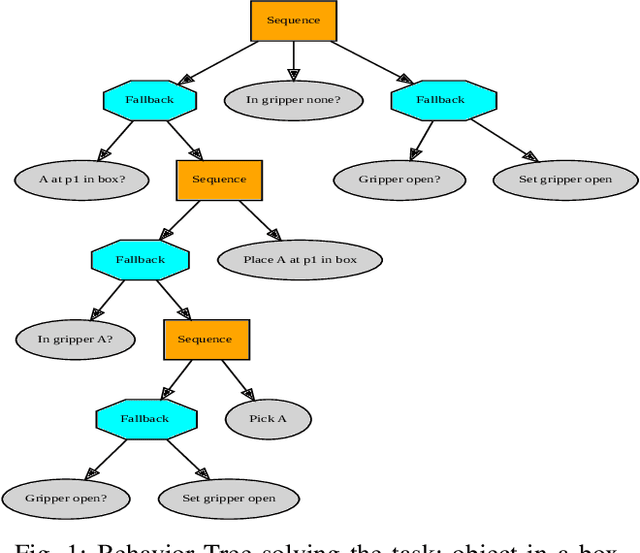
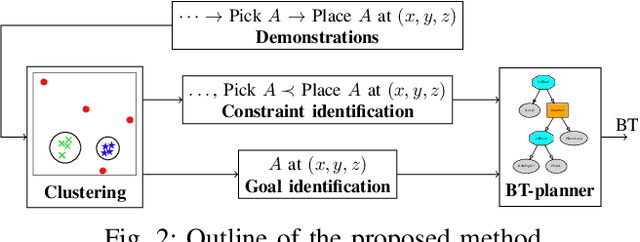
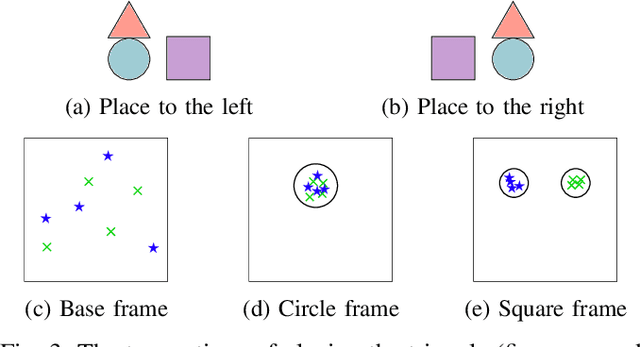
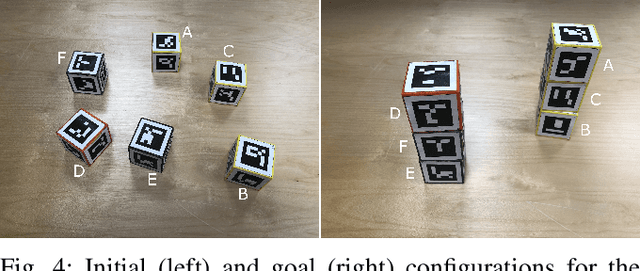
Fast changing tasks in unpredictable, collaborative environments are typical for medium-small companies, where robotised applications are increasing. Thus, robot programs should be generated in short time with small effort, and the robot able to react dynamically to the environment. To address this we propose a method that combines context awareness and planning to learn Behavior Trees (BTs), a reactive policy representation that is becoming more popular in robotics and has been used successfully in many collaborative scenarios. Context awareness allows to infer from the demonstration the frames in which actions are executed and to capture relevant aspects of the task, while a planner is used to automatically generate the BT from the sequence of actions from the demonstration. The learned BT is shown to solve non-trivial manipulation tasks where learning the context is fundamental to achieve the goal. Moreover, we collected non-expert demonstrations to study the performances of the algorithm in industrial scenarios.
Combining Planning and Learning of Behavior Trees for Robotic Assembly
Mar 16, 2021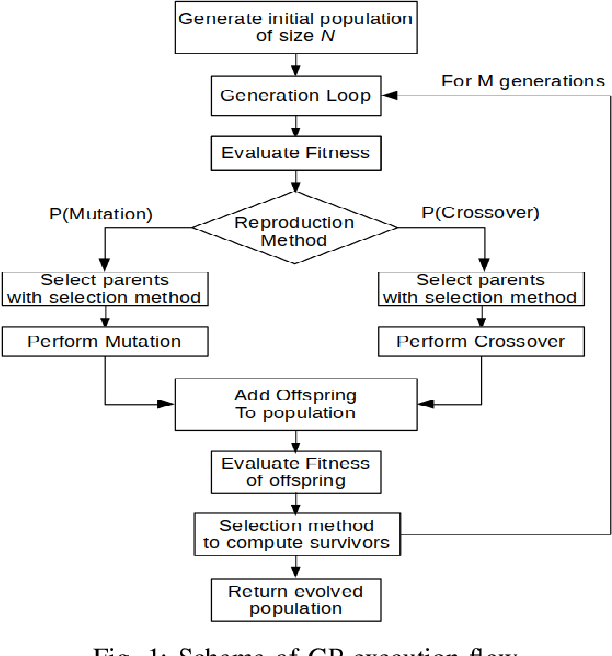
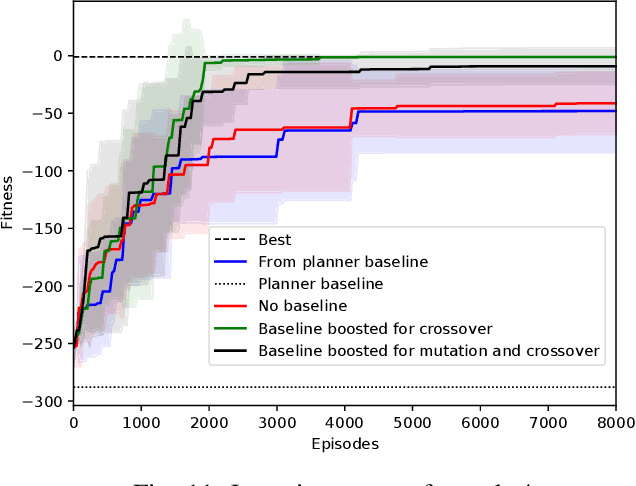
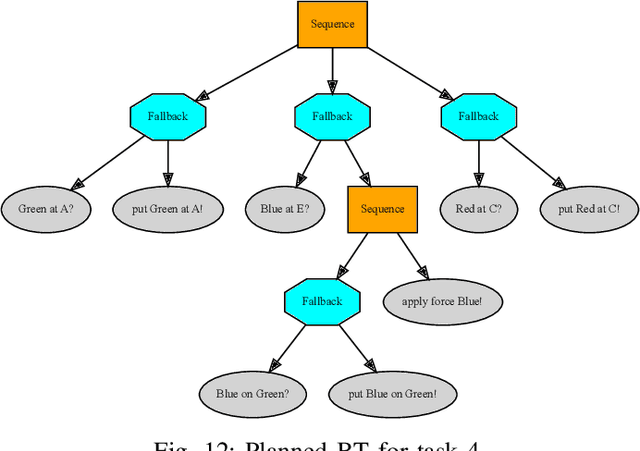
Industrial robots can solve very complex tasks in controlled environments, but modern applications require robots able to operate in unpredictable surroundings as well. An increasingly popular reactive policy architecture in robotics is Behavior Trees but as with other architectures, programming time still drives cost and limits flexibility. There are two main branches of algorithms to generate policies automatically, automated planning and machine learning, both with their own drawbacks. We propose a method for generating Behavior Trees using a Genetic Programming algorithm and combining the two branches by taking the result of an automated planner and inserting it into the population. Experimental results confirm that the proposed method of combining planning and learning performs well on a variety of robotic assembly problems and outperforms both of the base methods used separately. We also show that this type of high level learning of Behavior Trees can be transferred to a real system without further training.
Learning Behavior Trees with Genetic Programming in Unpredictable Environments
Nov 06, 2020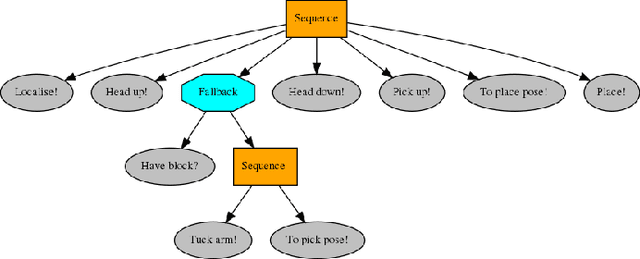
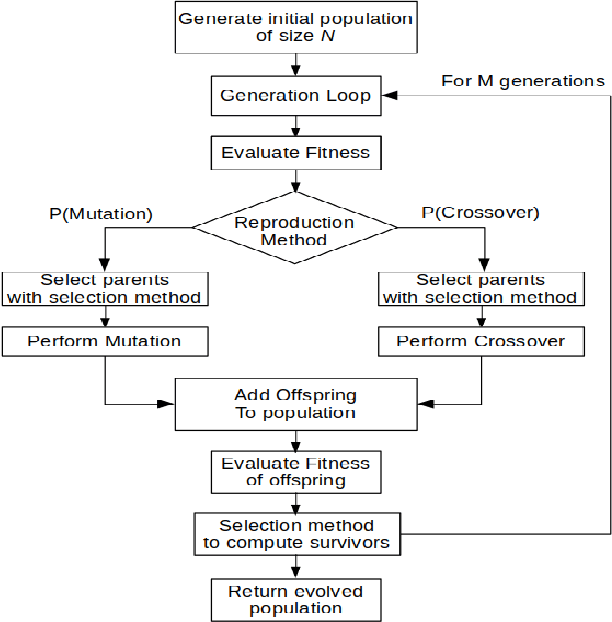
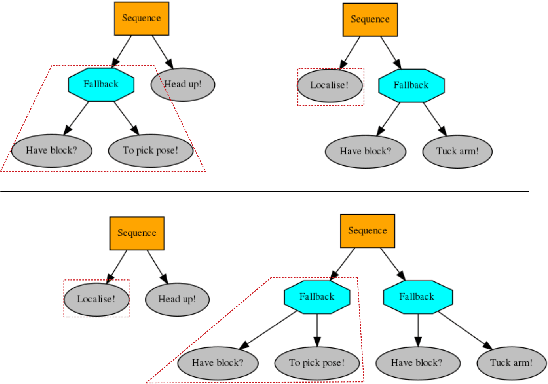

Modern industrial applications require robots to be able to operate in unpredictable environments, and programs to be created with a minimal effort, as there may be frequent changes to the task. In this paper, we show that genetic programming can be effectively used to learn the structure of a behavior tree (BT) to solve a robotic task in an unpredictable environment. Moreover, we propose to use a simple simulator for the learning and demonstrate that the learned BTs can solve the same task in a realistic simulator, reaching convergence without the need for task specific heuristics. The learned solution is tolerant to faults, making our method appealing for real robotic applications.
A Survey of Behavior Trees in Robotics and AI
May 13, 2020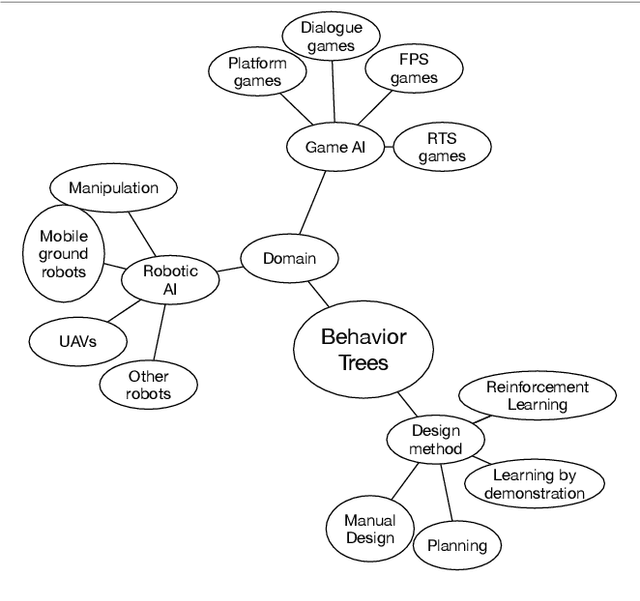

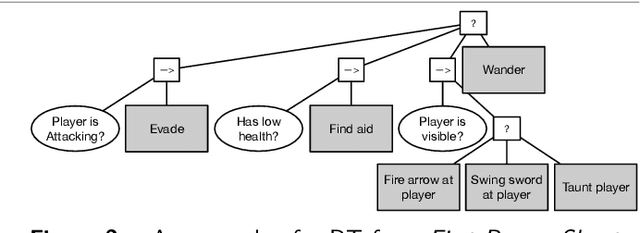
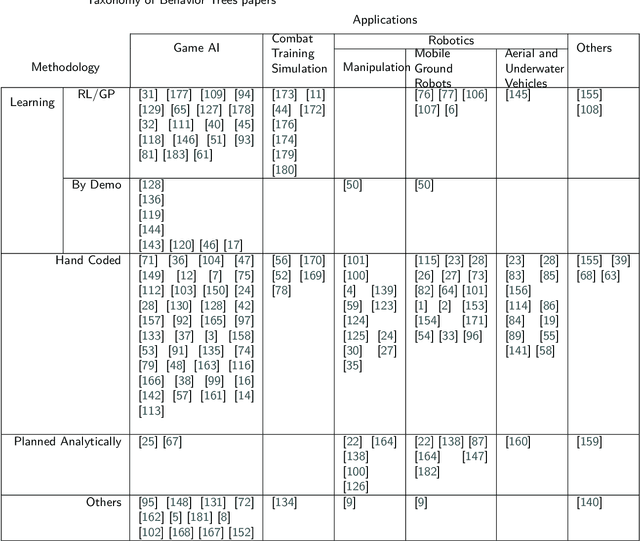
Behavior Trees (BTs) were invented as a tool to enable modular AI in computer games, but have received an increasing amount of attention in the robotics community in the last decade. With rising demands on agent AI complexity, game programmers found that the Finite State Machines (FSM) that they used scaled poorly and were difficult to extend, adapt and reuse. In BTs, the state transition logic is not dispersed across the individual states, but organized in a hierarchical tree structure, with the states as leaves. This has a significant effect on modularity, which in turn simplifies both synthesis and analysis by humans and algorithms alike. These advantages are needed not only in game AI design, but also in robotics, as is evident from the research being done. In this paper we present a comprehensive survey of the topic of BTs in Artificial Intelligence and Robotic applications. The existing literature is described and categorized based on methods, application areas and contributions, and the paper is concluded with a list of open research challenges.