 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeBeBOP -- Combining Reactive Planning and Bayesian Optimization to Solve Robotic Manipulation Tasks
Paper and Code
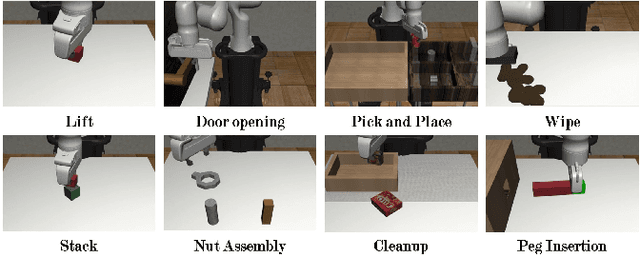
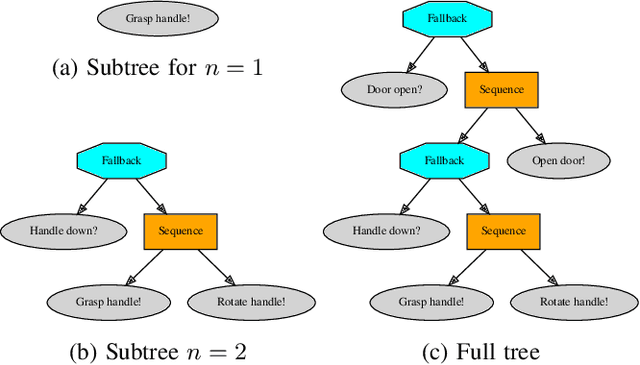
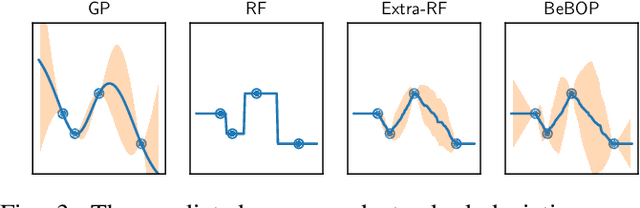
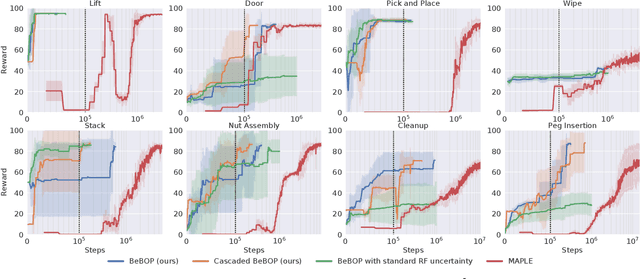
Robotic systems for manipulation tasks are increasingly expected to be easy to configure for new tasks. While in the past, robot programs were often written statically and tuned manually, the current, faster transition times call for robust, modular and interpretable solutions that also allow a robotic system to learn how to perform a task. We propose the method Behavior-based Bayesian Optimization and Planning (BeBOP) that combines two approaches for generating behavior trees: we build the structure using a reactive planner and learn specific parameters with Bayesian optimization. The method is evaluated on a set of robotic manipulation benchmarks and is shown to outperform state-of-the-art reinforcement learning algorithms by being up to 46 times faster while simultaneously being less dependent on reward shaping. We also propose a modification to the uncertainty estimate for the random forest surrogate models that drastically improves the results.