 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeBVR Gym: A Reinforcement Learning Environment for Beyond-Visual-Range Air Combat
Mar 26, 2024Creating new air combat tactics and discovering novel maneuvers can require numerous hours of expert pilots' time. Additionally, for each different combat scenario, the same strategies may not work since small changes in equipment performance may drastically change the air combat outcome. For this reason, we created a reinforcement learning environment to help investigate potential air combat tactics in the field of beyond-visual-range (BVR) air combat: the BVR Gym. This type of air combat is important since long-range missiles are often the first weapon to be used in aerial combat. Some existing environments provide high-fidelity simulations but are either not open source or are not adapted to the BVR air combat domain. Other environments are open source but use less accurate simulation models. Our work provides a high-fidelity environment based on the open-source flight dynamics simulator JSBSim and is adapted to the BVR air combat domain. This article describes the building blocks of the environment and some use cases.
Deep Learning Based Situation Awareness for Multiple Missiles Evasion
Feb 07, 2024



As the effective range of air-to-air missiles increases, it becomes harder for human operators to maintain the situational awareness needed to keep a UAV safe. In this work, we propose a decision support tool to help UAV operators in Beyond Visual Range (BVR) air combat scenarios assess the risks of different options and make decisions based on those. Earlier work focused on the threat posed by a single missile, and in this work, we extend the ideas to several missile threats. The proposed method uses Deep Neural Networks (DNN) to learn from high-fidelity simulations to provide the operator with an outcome estimate for a set of different strategies. Our results demonstrate that the proposed system can manage multiple incoming missiles, evaluate a family of options, and recommend the least risky course of action.
A Survey of Behavior Trees in Robotics and AI
May 13, 2020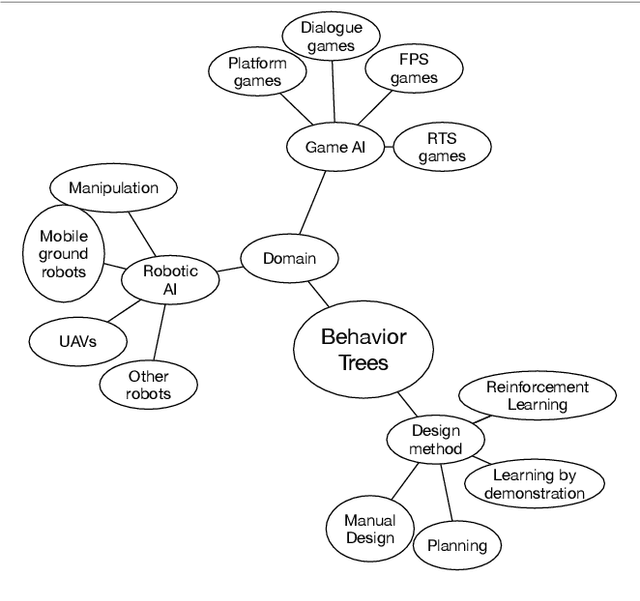

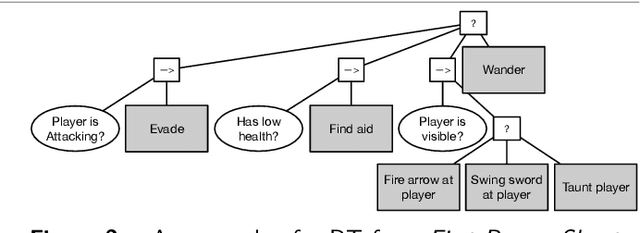
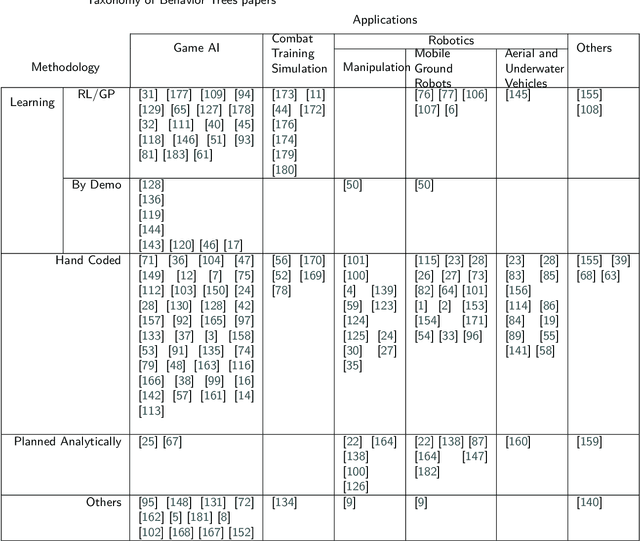
Behavior Trees (BTs) were invented as a tool to enable modular AI in computer games, but have received an increasing amount of attention in the robotics community in the last decade. With rising demands on agent AI complexity, game programmers found that the Finite State Machines (FSM) that they used scaled poorly and were difficult to extend, adapt and reuse. In BTs, the state transition logic is not dispersed across the individual states, but organized in a hierarchical tree structure, with the states as leaves. This has a significant effect on modularity, which in turn simplifies both synthesis and analysis by humans and algorithms alike. These advantages are needed not only in game AI design, but also in robotics, as is evident from the research being done. In this paper we present a comprehensive survey of the topic of BTs in Artificial Intelligence and Robotic applications. The existing literature is described and categorized based on methods, application areas and contributions, and the paper is concluded with a list of open research challenges.