 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeKoopman Theory-Inspired Method for Learning Time Advancement Operators in Unstable Flame Front Evolution
Dec 11, 2024



Predicting the evolution of complex systems governed by partial differential equations (PDEs) remains challenging, especially for nonlinear, chaotic behaviors. This study introduces Koopman-inspired Fourier Neural Operators (kFNO) and Convolutional Neural Networks (kCNN) to learn solution advancement operators for flame front instabilities. By transforming data into a high-dimensional latent space, these models achieve more accurate multi-step predictions compared to traditional methods. Benchmarking across one- and two-dimensional flame front scenarios demonstrates the proposed approaches' superior performance in short-term accuracy and long-term statistical reproduction, offering a promising framework for modeling complex dynamical systems.
BVR Gym: A Reinforcement Learning Environment for Beyond-Visual-Range Air Combat
Mar 26, 2024Creating new air combat tactics and discovering novel maneuvers can require numerous hours of expert pilots' time. Additionally, for each different combat scenario, the same strategies may not work since small changes in equipment performance may drastically change the air combat outcome. For this reason, we created a reinforcement learning environment to help investigate potential air combat tactics in the field of beyond-visual-range (BVR) air combat: the BVR Gym. This type of air combat is important since long-range missiles are often the first weapon to be used in aerial combat. Some existing environments provide high-fidelity simulations but are either not open source or are not adapted to the BVR air combat domain. Other environments are open source but use less accurate simulation models. Our work provides a high-fidelity environment based on the open-source flight dynamics simulator JSBSim and is adapted to the BVR air combat domain. This article describes the building blocks of the environment and some use cases.
Deep Learning Based Situation Awareness for Multiple Missiles Evasion
Feb 07, 2024



As the effective range of air-to-air missiles increases, it becomes harder for human operators to maintain the situational awareness needed to keep a UAV safe. In this work, we propose a decision support tool to help UAV operators in Beyond Visual Range (BVR) air combat scenarios assess the risks of different options and make decisions based on those. Earlier work focused on the threat posed by a single missile, and in this work, we extend the ideas to several missile threats. The proposed method uses Deep Neural Networks (DNN) to learn from high-fidelity simulations to provide the operator with an outcome estimate for a set of different strategies. Our results demonstrate that the proposed system can manage multiple incoming missiles, evaluate a family of options, and recommend the least risky course of action.
Data splitting improves statistical performance in overparametrized regimes
Oct 21, 2021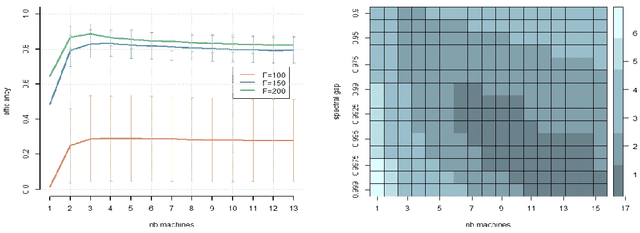
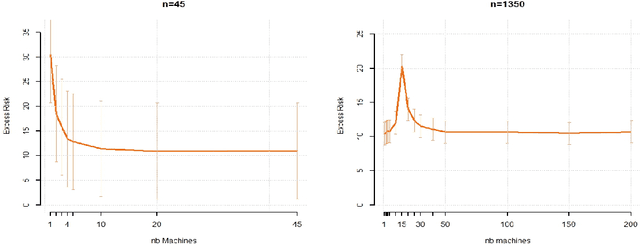
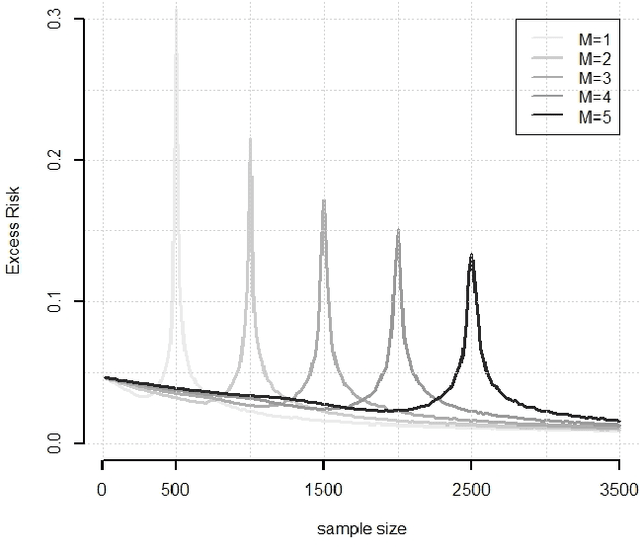
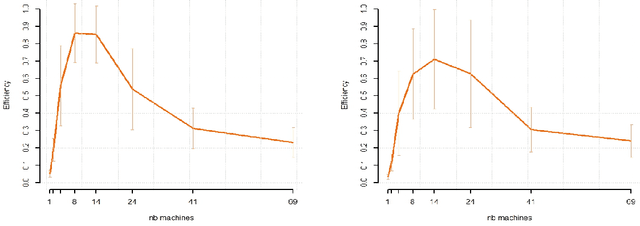
While large training datasets generally offer improvement in model performance, the training process becomes computationally expensive and time consuming. Distributed learning is a common strategy to reduce the overall training time by exploiting multiple computing devices. Recently, it has been observed in the single machine setting that overparametrization is essential for benign overfitting in ridgeless regression in Hilbert spaces. We show that in this regime, data splitting has a regularizing effect, hence improving statistical performance and computational complexity at the same time. We further provide a unified framework that allows to analyze both the finite and infinite dimensional setting. We numerically demonstrate the effect of different model parameters.