 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMechanically Programming the Cross-Sectional Shape of Soft Growing Robotic Structures for Patient Transfer
May 16, 2025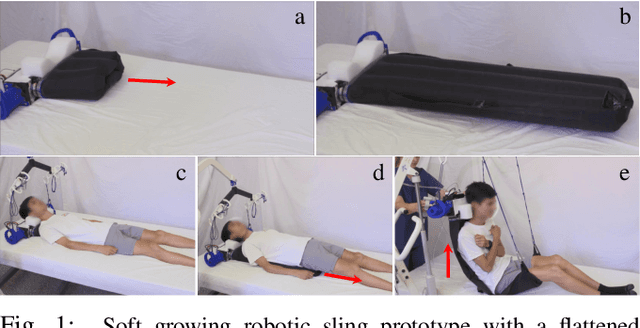
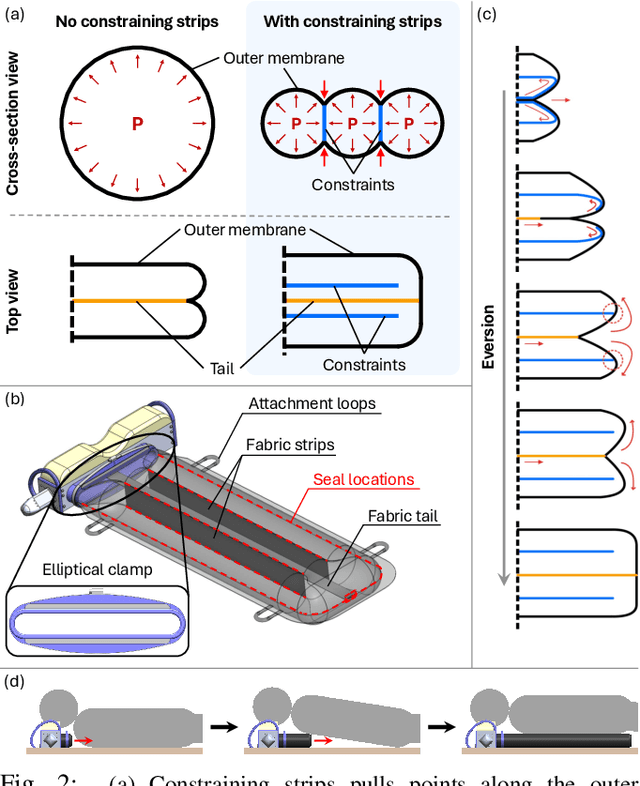
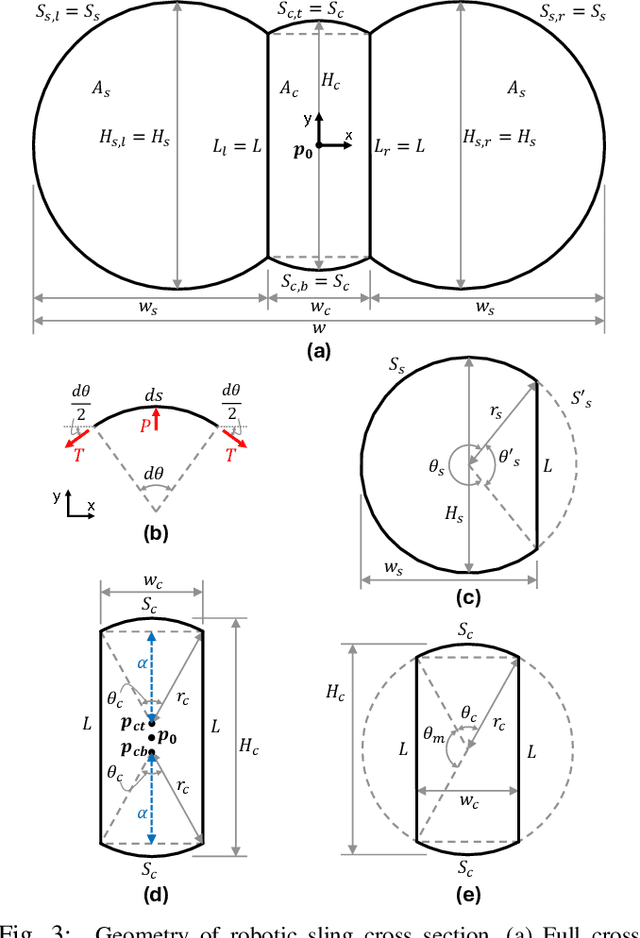
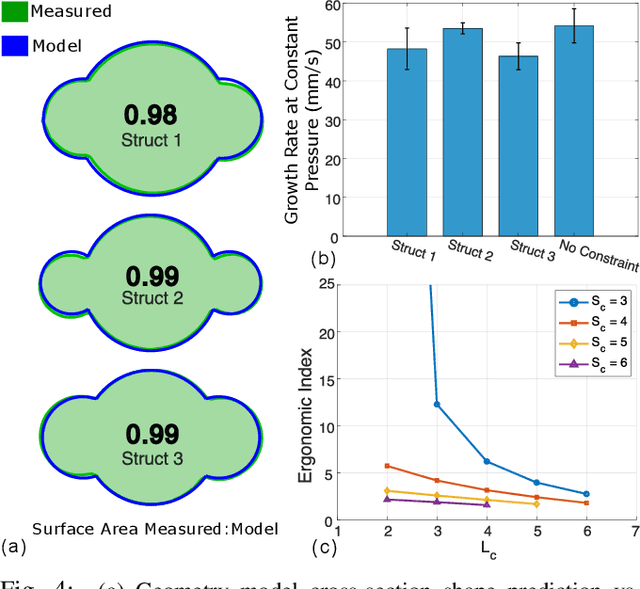
Pneumatic soft everting robotic structures have the potential to facilitate human transfer tasks due to their ability to grow underneath humans without sliding friction and their utility as a flexible sling when deflated. Tubular structures naturally yield circular cross-sections when inflated, whereas a robotic sling must be both thin enough to grow between them and their resting surface and wide enough to cradle the human. Recent works have achieved flattened cross-sections by including rigid components into the structure, but this reduces conformability to the human. We present a method of mechanically programming the cross-section of soft everting robotic structures using flexible strips that constrain radial expansion between points along the outer membrane. Our method enables simultaneously wide and thin profiles while maintaining the full multi-axis flexibility of traditional slings. We develop and validate a model relating the geometric design specifications to the fabrication parameters, and experimentally characterize their effects on growth rate. Finally, we prototype a soft growing robotic sling system and demonstrate its use for assisting a single caregiver in bed-to-chair patient transfer.
Loop closure grasping: Topological transformations enable strong, gentle, and versatile grasps
May 15, 2025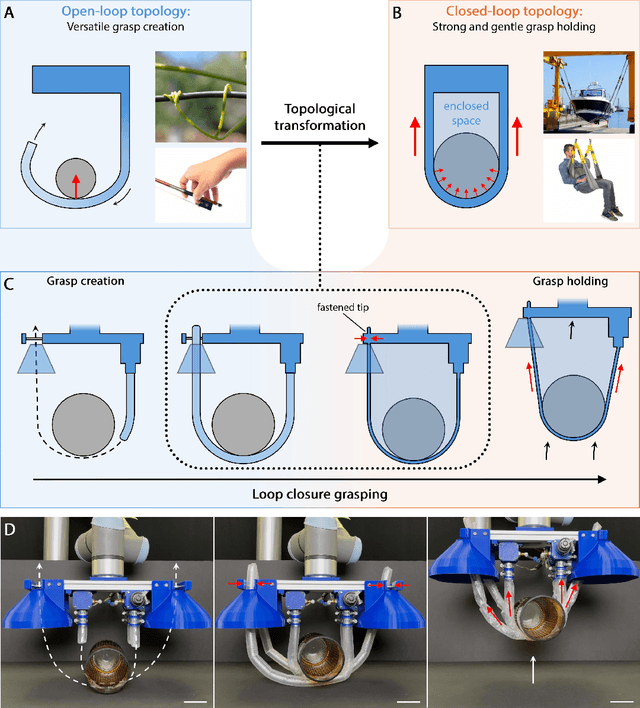
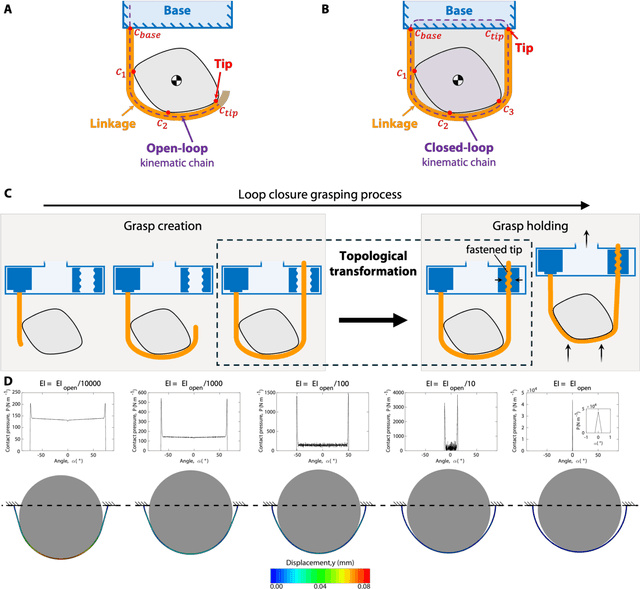

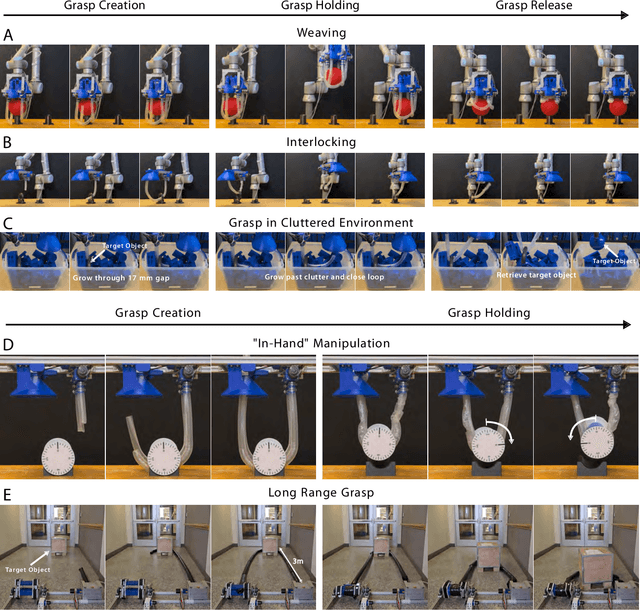
Grasping mechanisms must both create and subsequently hold grasps that permit safe and effective object manipulation. Existing mechanisms address the different functional requirements of grasp creation and grasp holding using a single morphology, but have yet to achieve the simultaneous strength, gentleness, and versatility needed for many applications. We present "loop closure grasping", a class of robotic grasping that addresses these different functional requirements through topological transformations between open-loop and closed-loop morphologies. We formalize these morphologies for grasping, formulate the loop closure grasping method, and present principles and a design architecture that we implement using soft growing inflated beams, winches, and clamps. The mechanisms' initial open-loop topology enables versatile grasp creation via unencumbered tip movement, and closing the loop enables strong and gentle holding with effectively infinite bending compliance. Loop closure grasping circumvents the tradeoffs of single-morphology designs, enabling grasps involving historically challenging objects, environments, and configurations.
Provably Stabilizing Global-Position Tracking Control for Hybrid Models of Multi-Domain Bipedal Walking via Multiple Lyapunov Analysis
Apr 27, 2023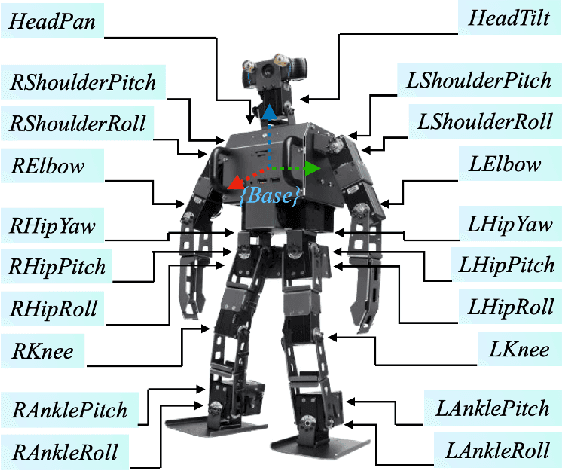



Accurate control of a humanoid robot's global position (i.e., its three-dimensional position in the world) is critical to the reliable execution of high-risk tasks such as avoiding collision with pedestrians in a crowded environment. This paper introduces a time-based nonlinear control method that achieves accurate global-position tracking (GPT) for multi-domain bipedal walking. Deriving a tracking controller for bipedal robots is challenging due to the highly complex robot dynamics that are time-varying and hybrid, especially for multi-domain walking that involves multiple phases/domains of full actuation, over actuation, and underactuation. To tackle this challenge, we introduce a continuous-phase GPT control law for multi-domain walking, which provably ensures the exponential convergence of the entire error state within the full and over actuation domains and that of the directly regulated error state within the underactuation domain. We then construct sufficient multiple-Lyapunov stability conditions for the hybrid multi-domain tracking error system under the proposed GPT control law. We illustrate the proposed controller design through both three-domain walking with all motors activated and two-domain gait with inactive ankle motors. Simulations of a ROBOTIS OP3 bipedal humanoid robot demonstrate the satisfactory accuracy and convergence rate of the proposed control approach under two different cases of multi-domain walking as well as various walking speeds and desired paths.