 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeHT-LIP Model based Robust Control of Quadrupedal Robot Locomotion under Unknown Vertical Ground Motion
Mar 24, 2024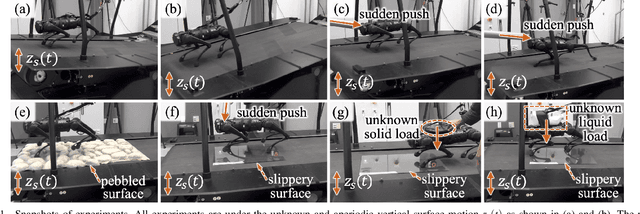
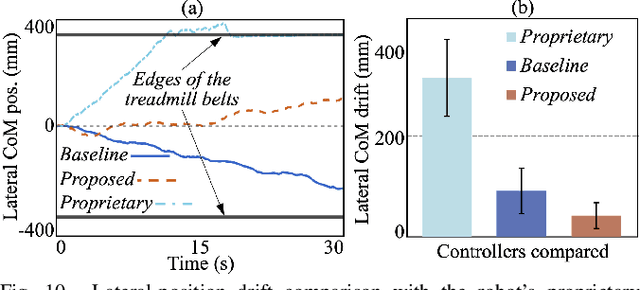
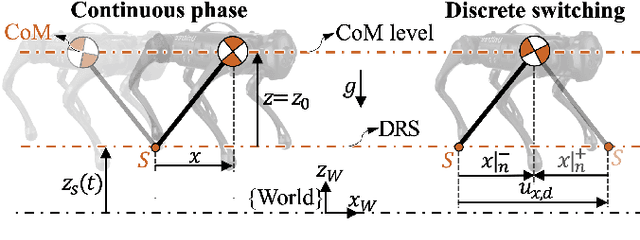
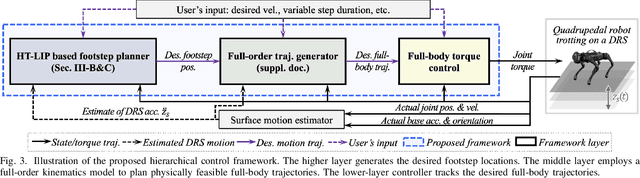
This paper presents a hierarchical control framework that enables robust quadrupedal locomotion on a dynamic rigid surface (DRS) with general and unknown vertical motions. The key novelty of the framework lies in its higher layer, which is a discrete-time, provably stabilizing footstep controller. The basis of the footstep controller is a new hybrid, time-varying, linear inverted pendulum (HT-LIP) model that is low-dimensional and accurately captures the essential robot dynamics during DRS locomotion. A new set of sufficient stability conditions are then derived to directly guide the controller design for ensuring the asymptotic stability of the HT-LIP model under general, unknown, vertical DRS motions. Further, the footstep controller is cast as a computationally efficient quadratic program that incorporates the proposed HT-LIP model and stability conditions. The middle layer takes the desired footstep locations generated by the higher layer as input to produce kinematically feasible full-body reference trajectories, which are then accurately tracked by a lower-layer torque controller. Hardware experiments on a Unitree Go1 quadrupedal robot confirm the robustness of the proposed framework under various unknown, aperiodic, vertical DRS motions and uncertainties (e.g., slippery and uneven surfaces, solid and liquid loads, and sudden pushes).
Provably Stabilizing Global-Position Tracking Control for Hybrid Models of Multi-Domain Bipedal Walking via Multiple Lyapunov Analysis
Apr 27, 2023



Accurate control of a humanoid robot's global position (i.e., its three-dimensional position in the world) is critical to the reliable execution of high-risk tasks such as avoiding collision with pedestrians in a crowded environment. This paper introduces a time-based nonlinear control method that achieves accurate global-position tracking (GPT) for multi-domain bipedal walking. Deriving a tracking controller for bipedal robots is challenging due to the highly complex robot dynamics that are time-varying and hybrid, especially for multi-domain walking that involves multiple phases/domains of full actuation, over actuation, and underactuation. To tackle this challenge, we introduce a continuous-phase GPT control law for multi-domain walking, which provably ensures the exponential convergence of the entire error state within the full and over actuation domains and that of the directly regulated error state within the underactuation domain. We then construct sufficient multiple-Lyapunov stability conditions for the hybrid multi-domain tracking error system under the proposed GPT control law. We illustrate the proposed controller design through both three-domain walking with all motors activated and two-domain gait with inactive ankle motors. Simulations of a ROBOTIS OP3 bipedal humanoid robot demonstrate the satisfactory accuracy and convergence rate of the proposed control approach under two different cases of multi-domain walking as well as various walking speeds and desired paths.
Vibration-Based Damage Detection in Wind Turbine Blades using Phase-Based Motion Estimation and Motion Magnification
Mar 30, 2018

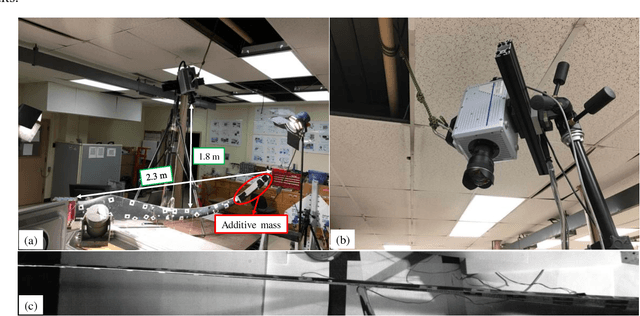
Vibration-based Structural Health Monitoring (SHM) techniques are among the most common approaches for structural damage identification. The presence of damage in structures may be identified by monitoring the changes in dynamic behavior subject to external loading, and is typically performed by using experimental modal analysis (EMA) or operational modal analysis (OMA). These tools for SHM normally require a limited number of physically attached transducers (e.g. accelerometers) in order to record the response of the structure for further analysis. Signal conditioners, wires, wireless receivers and a data acquisition system (DAQ) are also typical components of traditional sensing systems used in vibration-based SHM. However, instrumentation of lightweight structures with contact sensors such as accelerometers may induce mass-loading effects, and for large-scale structures, the instrumentation is labor intensive and time consuming. Achieving high spatial measurement resolution for a large-scale structure is not always feasible while working with traditional contact sensors, and there is also the potential for a lack of reliability associated with fixed contact sensors in outliving the life-span of the host structure. Among the state-of-the-art non-contact measurements, digital video cameras are able to rapidly collect high-density spatial information from structures remotely. In this paper, the subtle motions from recorded video (i.e. a sequence of images) are extracted by means of Phase-based Motion Estimation (PME) and the extracted information is used to conduct damage identification on a 2.3-meter long Skystream wind turbine blade (WTB). The PME and phased-based motion magnification approach estimates the structural motion from the captured sequence of images for both a baseline and damaged test cases on a wind turbine blade.