 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeKoopman global linearization of contact dynamics for robot locomotion and manipulation enables elaborate control
Nov 09, 2025Controlling robots that dynamically engage in contact with their environment is a pressing challenge. Whether a legged robot making-and-breaking contact with a floor, or a manipulator grasping objects, contact is everywhere. Unfortunately, the switching of dynamics at contact boundaries makes control difficult. Predictive controllers face non-convex optimization problems when contact is involved. Here, we overcome this difficulty by applying Koopman operators to subsume the segmented dynamics due to contact changes into a unified, globally-linear model in an embedding space. We show that viscoelastic contact at robot-environment interactions underpins the use of Koopman operators without approximation to control inputs. This methodology enables the convex Model Predictive Control of a legged robot, and the real-time control of a manipulator engaged in dynamic pushing. In this work, we show that our method allows robots to discover elaborate control strategies in real-time over time horizons with multiple contact changes, and the method is applicable to broad fields beyond robotics.
Mechanically Programming the Cross-Sectional Shape of Soft Growing Robotic Structures for Patient Transfer
May 16, 2025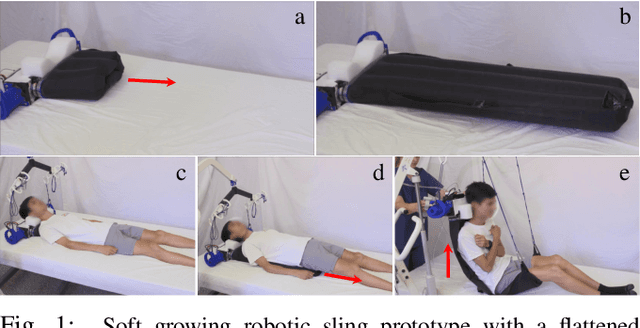
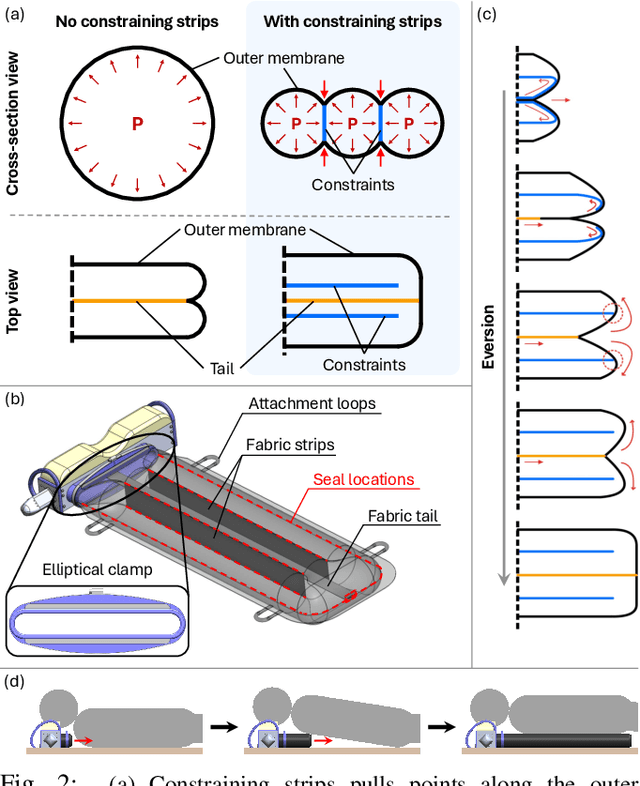
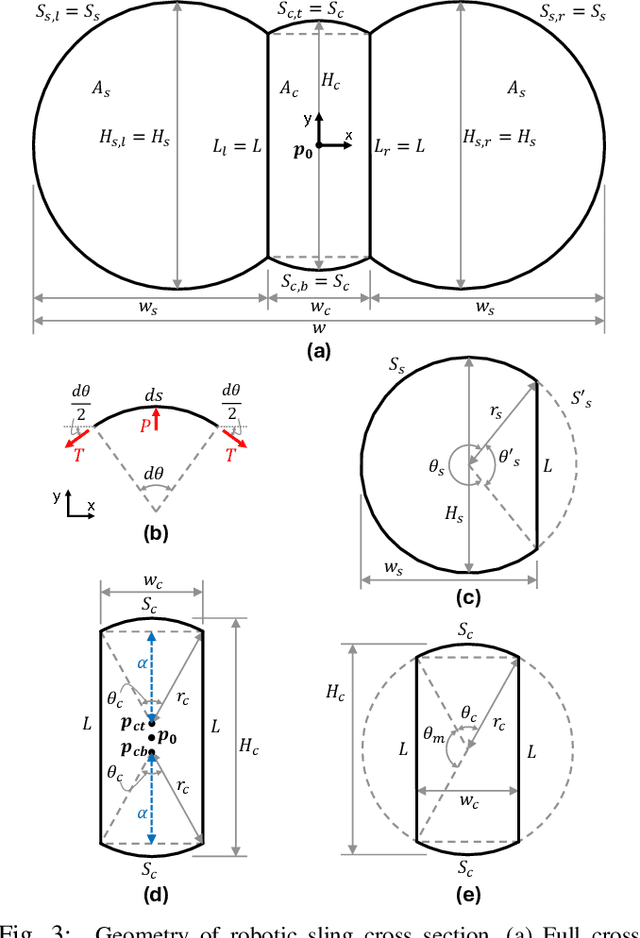
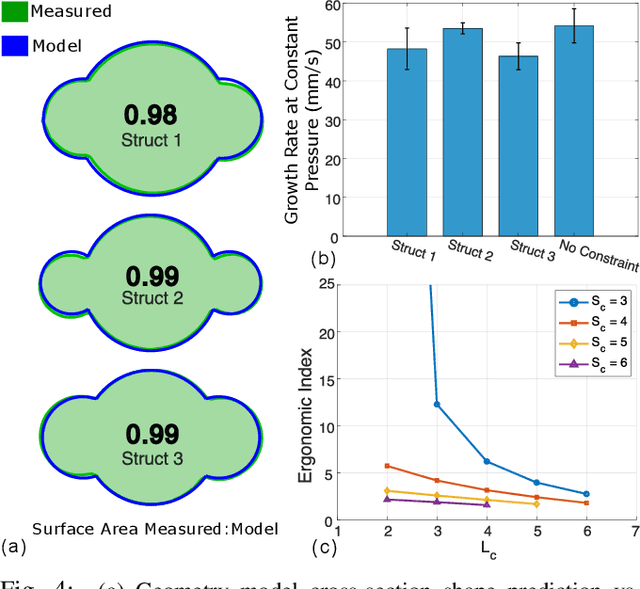
Pneumatic soft everting robotic structures have the potential to facilitate human transfer tasks due to their ability to grow underneath humans without sliding friction and their utility as a flexible sling when deflated. Tubular structures naturally yield circular cross-sections when inflated, whereas a robotic sling must be both thin enough to grow between them and their resting surface and wide enough to cradle the human. Recent works have achieved flattened cross-sections by including rigid components into the structure, but this reduces conformability to the human. We present a method of mechanically programming the cross-section of soft everting robotic structures using flexible strips that constrain radial expansion between points along the outer membrane. Our method enables simultaneously wide and thin profiles while maintaining the full multi-axis flexibility of traditional slings. We develop and validate a model relating the geometric design specifications to the fabrication parameters, and experimentally characterize their effects on growth rate. Finally, we prototype a soft growing robotic sling system and demonstrate its use for assisting a single caregiver in bed-to-chair patient transfer.
Loop closure grasping: Topological transformations enable strong, gentle, and versatile grasps
May 15, 2025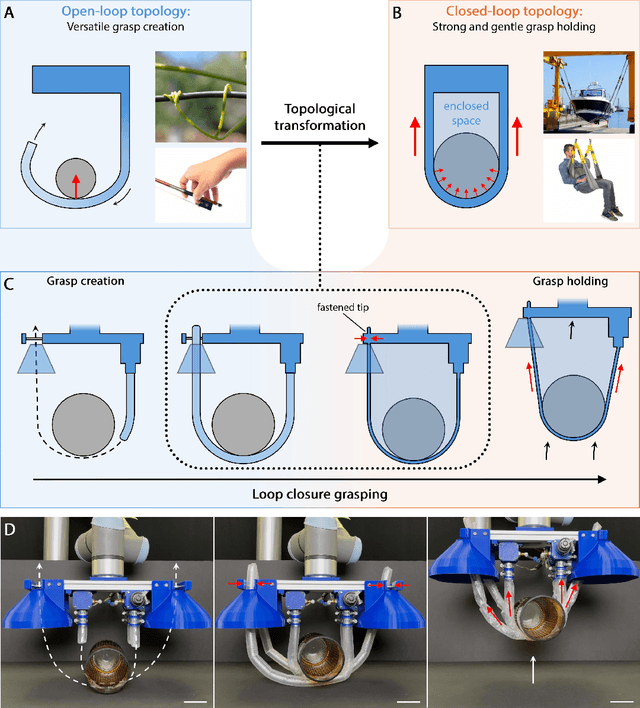
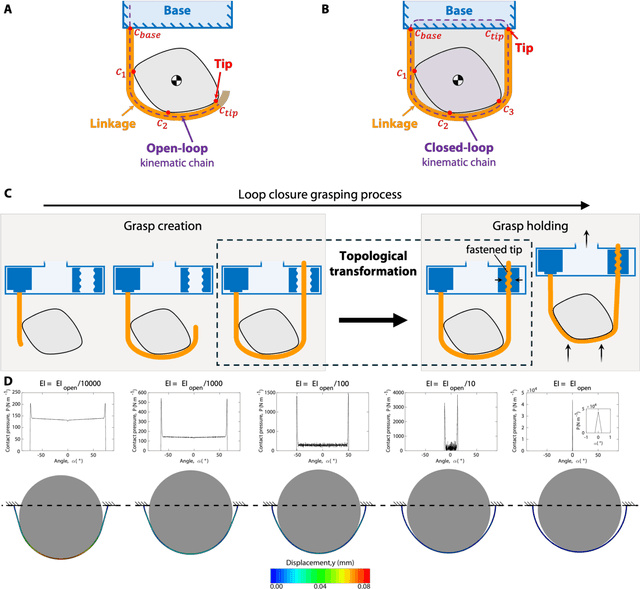

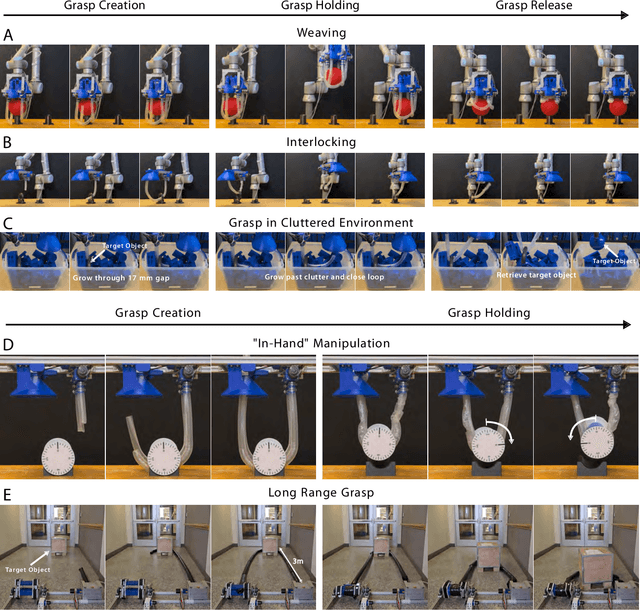
Grasping mechanisms must both create and subsequently hold grasps that permit safe and effective object manipulation. Existing mechanisms address the different functional requirements of grasp creation and grasp holding using a single morphology, but have yet to achieve the simultaneous strength, gentleness, and versatility needed for many applications. We present "loop closure grasping", a class of robotic grasping that addresses these different functional requirements through topological transformations between open-loop and closed-loop morphologies. We formalize these morphologies for grasping, formulate the loop closure grasping method, and present principles and a design architecture that we implement using soft growing inflated beams, winches, and clamps. The mechanisms' initial open-loop topology enables versatile grasp creation via unencumbered tip movement, and closing the loop enables strong and gentle holding with effectively infinite bending compliance. Loop closure grasping circumvents the tradeoffs of single-morphology designs, enabling grasps involving historically challenging objects, environments, and configurations.
A two-speed actuator for robotics with fast seamless gear shifting
May 26, 2024



This paper present a novel dual-speed actuator adapted to robotics. In many applications, robots have to bear large loads while moving slowly and also have to move quickly through the air with almost no load. This lead to conflicting requirements for their actuators. Multiple gear ratios address this issue by allowing an effective use of power over a wide range of torque-speed load conditions. Furthermore, very different gear ratios also lead to drastic changes of the intrinsic impedance, enabling a non-back-drivable mode for stiff position control and a back-drivable mode for force control. The proposed actuator consists of two electric motors coupled to a differential; one has a large gear ratio while the other is almost direct-drive and equipped with a brake. During the high-force mode the brake is locked, only one motor is used, and the actuator behaves like a regular highly-geared servo-motor. During the high-speed mode the brake is open, both motor are used at the same time, and the actuator behaves like a direct drive motor. A dynamic model is developed and novel controllers are proposed for synergic use of both motors. The redundancy of motors is exploited for maintaining full control of the output during mode transitions, allowing for fast and seamless switching even when interacting with unknown environments. Results are demonstrated with a proof-of-concept linear actuator.
Leveraging Natural Load Dynamics with Variable Gear-ratio Actuators
May 23, 2024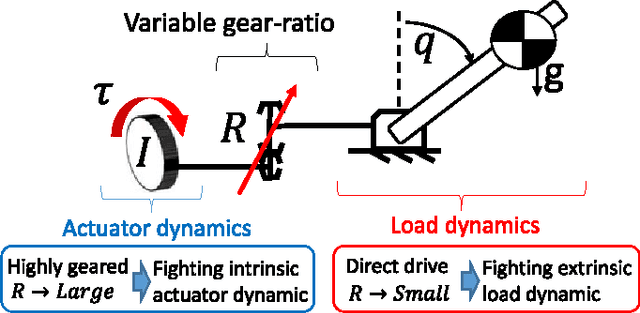
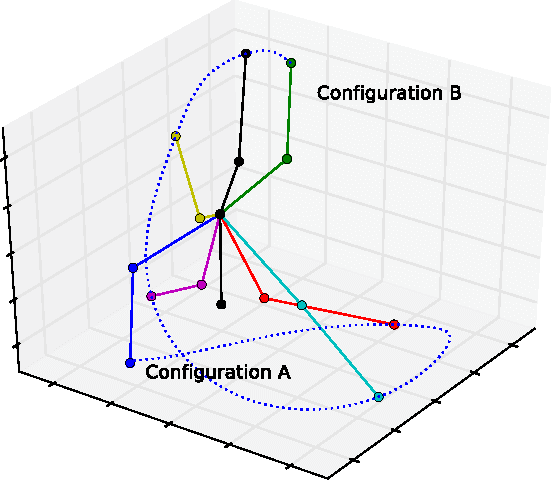
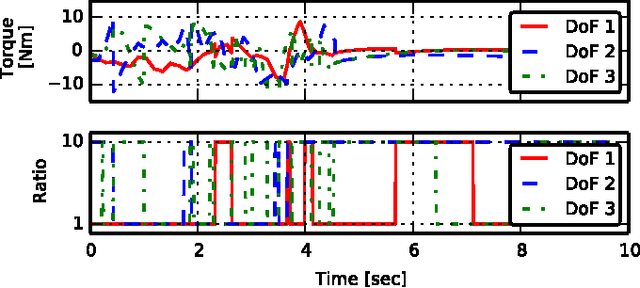
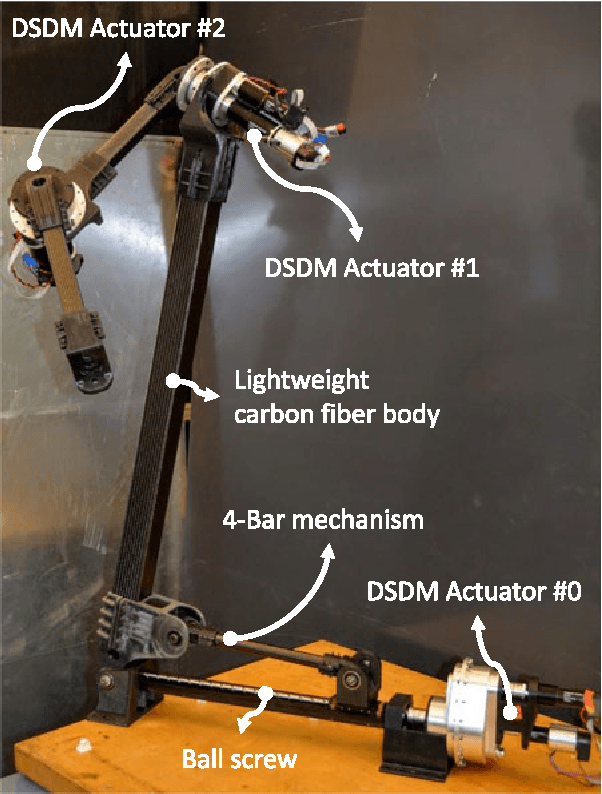
This paper presents a robotic system where the gear-ratio of an actuator is dynamically changed to either leverage or attenuate the natural load dynamics. Based on this principle, lightweight robotic systems can be made fast and strong; exploiting the natural load dynamics for moving at higher speeds (small reduction ratio), while also able to bear a large load through the attenuation of the load dynamics (large reduction ratio). A model-based control algorithm to automatically select the optimal gear-ratios that minimize the total actuator torques for an arbitrary dynamic state and expected uncertainty level is proposed. Also, a novel 3-DoF robot arm using custom actuators with two discrete gear-ratios is presented. The advantages of gear-shifting dynamically are demonstrated through experiments and simulations. Results show that actively changing the gear-ratio using the proposed control algorithms can lead to an order-of-magnitude reduction of necessary actuator torque and power, and also increase robustness to disturbances.
Shared Control Based on Extended Lipschitz Analysis With Application to Human-Superlimb Collaboration
Sep 01, 2023This paper presents a quantitative method to construct voluntary manual control and sensor-based reactive control in human-robot collaboration based on Lipschitz conditions. To collaborate with a human, the robot observes the human's motions and predicts a desired action. This predictor is constructed from data of human demonstrations observed through the robot's sensors. Analysis of demonstration data based on Lipschitz quotients evaluates a) whether the desired action is predictable and b) to what extent the action is predictable. If the quotients are low for all the input-output pairs of demonstration data, a predictor can be constructed with a smooth function. In dealing with human demonstration data, however, the Lipschitz quotients tend to be very high in some situations due to the discrepancy between the information that humans use and the one robots can obtain. This paper a) presents a method for seeking missing information or a new variable that can lower the Lipschitz quotients by adding the new variable to the input space, and b) constructs a human-robot shared control system based on the Lipschitz analysis. Those predictable situations are assigned to the robot's reactive control, while human voluntary control is assigned to those situations where the Lipschitz quotients are high even after the new variable is added. The latter situations are deemed unpredictable and are rendered to the human. This human-robot shared control method is applied to assist hemiplegic patients in a bimanual eating task with a Supernumerary Robotic Limb, which works in concert with an unaffected functional hand.
A Data-Driven Approach to Positioning Grab Bars in the Sagittal Plane for Elderly Persons
Jun 08, 2023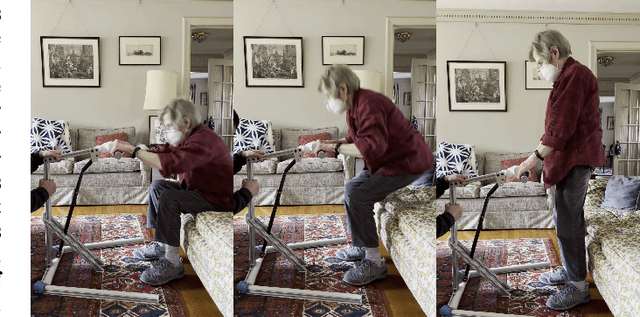



The placement of grab bars for elderly users is based largely on ADA building codes and does not reflect the large differences in height, mobility, and muscle power between individual persons. The goal of this study is to see if there are any correlations between an elderly user's preferred handlebar pose and various demographic indicators, self-rated mobility for tasks requiring postural change, and biomechanical markers. For simplicity, we consider only the case where the handlebar is positioned directly in front of the user, as this confines the relevant body kinematics to a 2D sagittal plane. Previous eldercare devices have been constructed to position a handlebar in various poses in space. Our work augments these devices and adds to the body of knowledge by assessing how the handlebar should be positioned based on data on actual elderly people instead of simulations.
Language Control in Robotics
May 04, 2023



For robots performing a assistive tasks for the humans, it is crucial to synchronize their speech with their motions, in order to achieve natural and effective human-robot interaction. When a robot's speech is out of sync with their motions, it can cause confusion, frustration, and misinterpretation of the robot's intended meaning. Humans are accustomed to using both verbal and nonverbal cues to understand and coordinate with each other, and robots that can align their speech with their actions can tap into this natural mode of communication. In this research, we propose a language controller for robots to control the pace, tone, and pauses of their speech along with it's motion in the trajectory. The robot's speed is adjusted using an admittance controller based on the force input from the user, and the robot's speech speed is modulated using phase-vocoders.
An Avatar Robot Overlaid with the 3D Human Model of a Remote Operator
Mar 05, 2023



Although telepresence assistive robots have made significant progress, they still lack the sense of realism and physical presence of the remote operator. This results in a lack of trust and adoption of such robots. In this paper, we introduce an Avatar Robot System which is a mixed real/virtual robotic system that physically interacts with a person in proximity of the robot. The robot structure is overlaid with the 3D model of the remote caregiver and visualized through Augmented Reality (AR). In this way, the person receives haptic feedback as the robot touches him/her. We further present an Optimal Non-Iterative Alignment solver that solves for the optimally aligned pose of 3D Human model to the robot (shoulder to the wrist non-iteratively). The proposed alignment solver is stateless, achieves optimal alignment and faster than the baseline solvers (demonstrated in our evaluations). We also propose an evaluation framework that quantifies the alignment quality of the solvers through multifaceted metrics. We show that our solver can consistently produce poses with similar or superior alignments as IK-based baselines without their potential drawbacks.
Learned Lifted Linearization Applied to Unstable Dynamic Systems Enabled by Koopman Direct Encoding
Oct 24, 2022



This paper presents a Koopman lifting linearization method that is applicable to nonlinear dynamical systems having both stable and unstable regions. It is known that DMD and other standard data-driven methods face a fundamental difficulty in constructing a Koopman model when applied to unstable systems. Here we solve the problem by incorporating knowledge about a nonlinear state equation with a learning method for finding an effective set of observables. In a lifted space, stable and unstable regions are separated into independent subspaces. Based on this property, we propose to find effective observables through neural net training where training data are separated into stable and unstable trajectories. The resultant learned observables are used for constructing a linear state transition matrix using method known as Direct Encoding, which transforms the nonlinear state equation to a state transition matrix through inner product computations with the observables. The proposed method shows a dramatic improvement over existing DMD and data-driven methods.