 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeTheoretical Closed-loop Stability Bounds for Dynamical System Coupled with Diffusion Policies
Nov 19, 2025Diffusion Policy has shown great performance in robotic manipulation tasks under stochastic perturbations, due to its ability to model multimodal action distributions. Nonetheless, its reliance on a computationally expensive reverse-time diffusion (denoising) process, for action inference, makes it challenging to use for real-time applications where quick decision-making is mandatory. This work studies the possibility of conducting the denoising process only partially before executing an action, allowing the plant to evolve according to its dynamics in parallel to the reverse-time diffusion dynamics ongoing on the computer. In a classical diffusion policy setting, the plant dynamics are usually slow and the two dynamical processes are uncoupled. Here, we investigate theoretical bounds on the stability of closed-loop systems using diffusion policies when the plant dynamics and the denoising dynamics are coupled. The contribution of this work gives a framework for faster imitation learning and a metric that yields if a controller will be stable based on the variance of the demonstrations.
Model-Based Real-Time Pose and Sag Estimation of Overhead Power Lines Using LiDAR for Drone Inspection
Jun 25, 2025Drones can inspect overhead power lines while they remain energized, significantly simplifying the inspection process. However, localizing a drone relative to all conductors using an onboard LiDAR sensor presents several challenges: (1) conductors provide minimal surface for LiDAR beams limiting the number of conductor points in a scan, (2) not all conductors are consistently detected, and (3) distinguishing LiDAR points corresponding to conductors from other objects, such as trees and pylons, is difficult. This paper proposes an estimation approach that minimizes the error between LiDAR measurements and a single geometric model representing the entire conductor array, rather than tracking individual conductors separately. Experimental results, using data from a power line drone inspection, demonstrate that this method achieves accurate tracking, with a solver converging under 50 ms per frame, even in the presence of partial observations, noise, and outliers. A sensitivity analysis shows that the estimation approach can tolerate up to twice as many outlier points as valid conductors measurements.
Reconfigurable Hydrostatics: Toward Multifunctional and Powerful Wearable Robotics
Oct 23, 2024



Wearable and locomotive robot designers face multiple challenges when choosing actuation. Traditional fully actuated designs using electric motors are multifunctional but oversized and inefficient for bearing conservative loads and for being backdrivable. Alternatively, quasi-passive and underactuated designs reduce the size of motorization and energy storage, but are often designed for specific tasks. Designers of versatile and stronger wearable robots will face these challenges unless future actuators become very torque-dense, backdrivable and efficient. This paper explores a design paradigm for addressing this issue: reconfigurable hydrostatics. We show that a hydrostatic actuator can integrate a passive force mechanism and a sharing mechanism in the fluid domain and still be multifunctional. First, an analytical study compares how these two mechanisms can relax the motorization requirements in the context of a load-bearing exoskeleton. Then, the hydrostatic concept integrating these two mechanisms using hydraulic components is presented. A case study analysis shows the mass/efficiency/inertia benefits of the concept over a fully actuated one. Then, the feasibility of the concept is partially validated with a proof-of-concept that actuates the knees of an exoskeleton. The experiments show that it can track the vertical ground reaction force (GRF) profiles of walking, running, squatting, and jumping, and that the energy consumption is 6x lower. The transient force behaviors due to switching from one leg to the other are also analyzed along with some mitigation to improve them.
Influence Vectors Control for Robots Using Cellular-like Binary Actuators
Jul 25, 2024



Robots using cellular-like redundant binary actuators could outmatch electric-gearmotor robotic systems in terms of reliability, force-to-weight ratio and cost. This paper presents a robust fault tolerant control scheme that is designed to meet the control challenges encountered by such robots, i.e., discrete actuator inputs, complex system modeling and cross-coupling between actuators. In the proposed scheme, a desired vectorial system output, such as a position or a force, is commanded by recruiting actuators based on their influence vectors on the output. No analytical model of the system is needed; influence vectors are identified experimentally by sequentially activating each actuator. For position control tasks, the controller uses a probabilistic approach and a genetic algorithm to determine an optimal combination of actuators to recruit. For motion control tasks, the controller uses a sliding mode approach and independent recruiting decision for each actuator. Experimental results on a four degrees of freedom binary manipulator with twenty actuators confirm the method's effectiveness, and its ability to tolerate massive perturbations and numerous actuator failures.
Soft Two-degree-of-freedom Dielectric Elastomer Position Sensor Exhibiting Linear Behavior
May 27, 2024



Soft robots could bring robotic systems to new horizons, by enabling safe human-machine interaction. For precise control, these soft structures require high level position feedback that is not easily achieved through conventional one-degree-of-freedom (DOF) sensing apparatus. In this paper, a soft two-DOF dielectric elastomer (DE) sensor is specifically designed to provide accurate position feedback for a soft polymer robotic manipulator. The technology is exemplified on a soft robot intended for MRI-guided prostate interventions. DEs are chosen for their major advantages of softness, high strains, low cost and embedded multiple-DOF sensing capability, providing excellent system integration. A geometrical model of the proposed DE sensor is developed and compared to experimental results in order to understand sensor mechanics. Using a differential measurement approach, a handmade prototype provided linear sensory behavior and 0.2 mm accuracy on two-DOF. This correlates to a 0.7\% error over the sensor's 30 mm x 30 mm planar range, demonstrating the outstanding potential of DE technology for accurate multi-DOF position sensing.
A two-speed actuator for robotics with fast seamless gear shifting
May 26, 2024



This paper present a novel dual-speed actuator adapted to robotics. In many applications, robots have to bear large loads while moving slowly and also have to move quickly through the air with almost no load. This lead to conflicting requirements for their actuators. Multiple gear ratios address this issue by allowing an effective use of power over a wide range of torque-speed load conditions. Furthermore, very different gear ratios also lead to drastic changes of the intrinsic impedance, enabling a non-back-drivable mode for stiff position control and a back-drivable mode for force control. The proposed actuator consists of two electric motors coupled to a differential; one has a large gear ratio while the other is almost direct-drive and equipped with a brake. During the high-force mode the brake is locked, only one motor is used, and the actuator behaves like a regular highly-geared servo-motor. During the high-speed mode the brake is open, both motor are used at the same time, and the actuator behaves like a direct drive motor. A dynamic model is developed and novel controllers are proposed for synergic use of both motors. The redundancy of motors is exploited for maintaining full control of the output during mode transitions, allowing for fast and seamless switching even when interacting with unknown environments. Results are demonstrated with a proof-of-concept linear actuator.
Leveraging Natural Load Dynamics with Variable Gear-ratio Actuators
May 23, 2024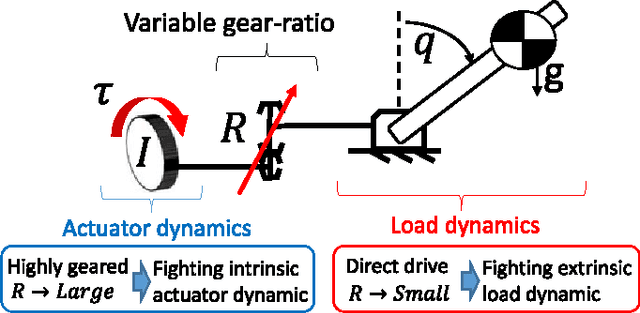
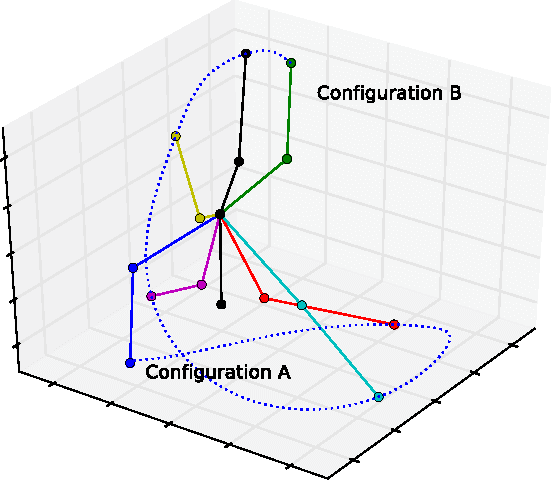
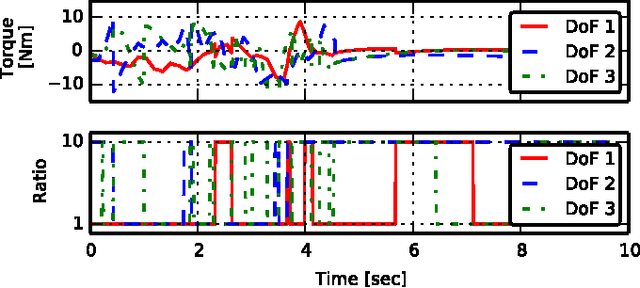
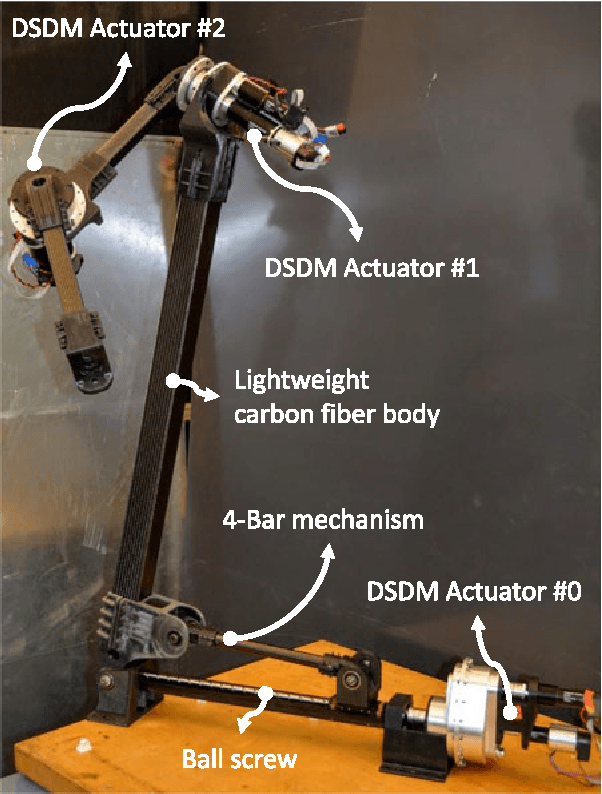
This paper presents a robotic system where the gear-ratio of an actuator is dynamically changed to either leverage or attenuate the natural load dynamics. Based on this principle, lightweight robotic systems can be made fast and strong; exploiting the natural load dynamics for moving at higher speeds (small reduction ratio), while also able to bear a large load through the attenuation of the load dynamics (large reduction ratio). A model-based control algorithm to automatically select the optimal gear-ratios that minimize the total actuator torques for an arbitrary dynamic state and expected uncertainty level is proposed. Also, a novel 3-DoF robot arm using custom actuators with two discrete gear-ratios is presented. The advantages of gear-shifting dynamically are demonstrated through experiments and simulations. Results show that actively changing the gear-ratio using the proposed control algorithms can lead to an order-of-magnitude reduction of necessary actuator torque and power, and also increase robustness to disturbances.
A Dual-Motor Actuator for Ceiling Robots with High Force and High Speed Capabilities
May 08, 2024

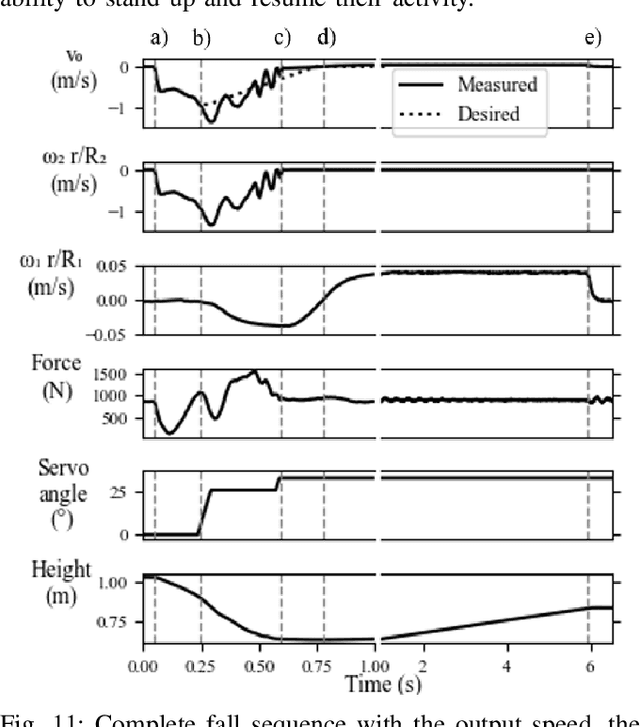

Patient transfer devices allow to move patients passively in hospitals and care centers. Instead of hoisting the patient, it would be beneficial in some cases to assist their movement, enabling them to move by themselves. However, patient assistance requires devices capable of precisely controlling output forces at significantly higher speeds than those used for patient transfers alone, and a single motor solution would be over-sized and show poor efficiency to do both functions. This paper presents a dual-motor actuator and control schemes adapted for a patient mobility equipment that can be used to transfer patients, assist patient in their movement, and help prevent falls. The prototype is shown to be able to lift patients weighing up to 318 kg, to assist a patient with a desired force of up to 100 kg with a precision of 7.8%. Also, a smart control scheme to manage falls is shown to be able to stop a patient who is falling by applying a desired deceleration.
Using Buckingham's $π$ Theorem for Multi-System Learning Transfer: a Case-study with 3 Vehicles Sharing a Database
Oct 26, 2023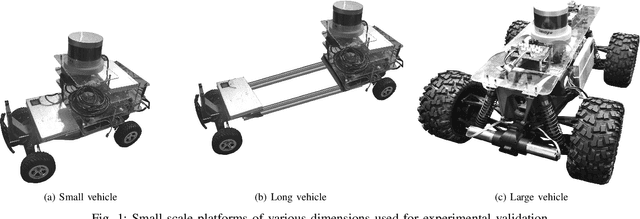


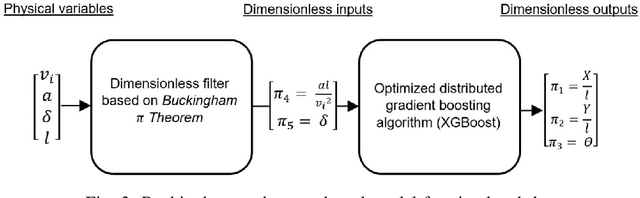
Learning schemes for planning and control are limited by the difficulty of collecting large amounts of experimental data or having to rely on high-fidelity simulations. This paper explores the potential of a proposed learning scheme that leverages dimensionless numbers based on Buckingham's $\pi$ theorem to improve data efficiency and facilitate knowledge sharing between similar systems. A case study using car-like robots compares traditional and dimensionless learning models on simulated and experimental data to validate the benefits of the new dimensionless learning approach. Preliminary results show that this new dimensionless approach could accelerate the learning rate and improve the accuracy of the model and should be investigated further.
Assessing Wind Impact on Semi-Autonomous Drone Landings for In-Contact Power Line Inspection
Sep 11, 2023



In recent years, the use of inspection drones has become increasingly popular for high-voltage electric cable inspections due to their efficiency, cost-effectiveness, and ability to access hard-to-reach areas. However, safely landing drones on power lines, especially under windy conditions, remains a significant challenge. This study introduces a semi-autonomous control scheme for landing on an electrical line with the NADILE drone (an experimental drone based on original LineDrone key features for inspection of power lines) and assesses the operating envelope under various wind conditions. A Monte Carlo method is employed to analyze the success probability of landing given initial drone states. The performance of the system is evaluated for two landing strategies, variously controllers parameters and four level of wind intensities. The results show that a two-stage landing strategies offers higher probabilities of landing success and give insight regarding the best controller parameters and the maximum wind level for which the system is robust. Lastly, an experimental demonstration of the system landing autonomously on a power line is presented.