 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeUsing Buckingham's $π$ Theorem for Multi-System Learning Transfer: a Case-study with 3 Vehicles Sharing a Database
Oct 26, 2023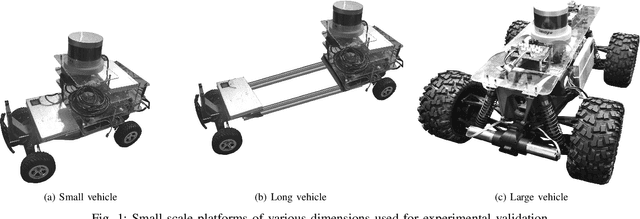


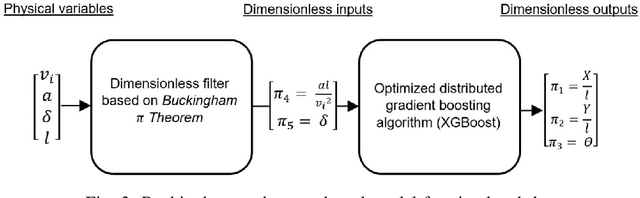
Learning schemes for planning and control are limited by the difficulty of collecting large amounts of experimental data or having to rely on high-fidelity simulations. This paper explores the potential of a proposed learning scheme that leverages dimensionless numbers based on Buckingham's $\pi$ theorem to improve data efficiency and facilitate knowledge sharing between similar systems. A case study using car-like robots compares traditional and dimensionless learning models on simulated and experimental data to validate the benefits of the new dimensionless learning approach. Preliminary results show that this new dimensionless approach could accelerate the learning rate and improve the accuracy of the model and should be investigated further.
Development of a hybrid model-based data-driven collision avoidance algorithm for vehicles in low adhesion conditions
May 30, 2022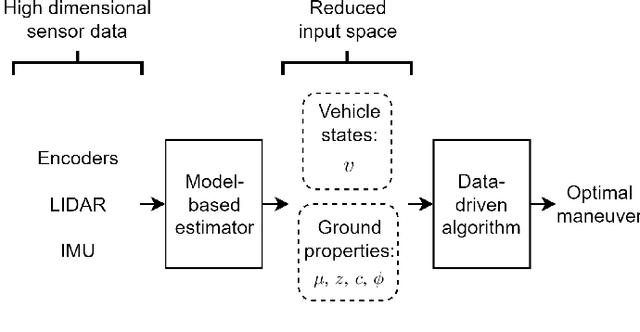
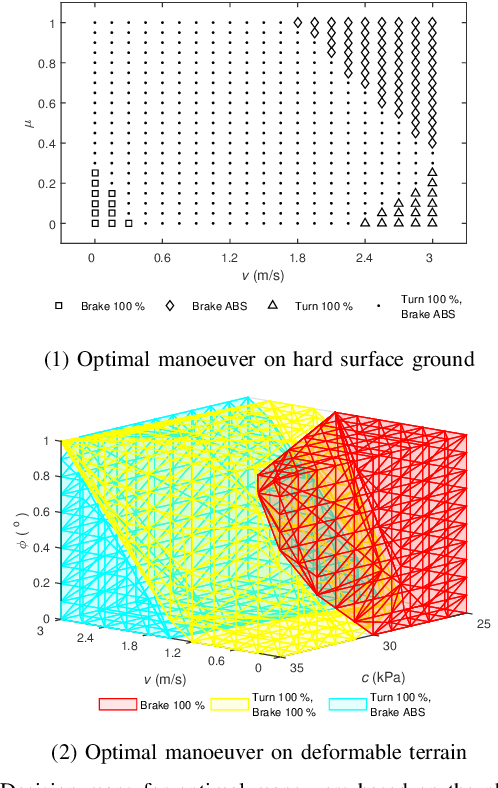
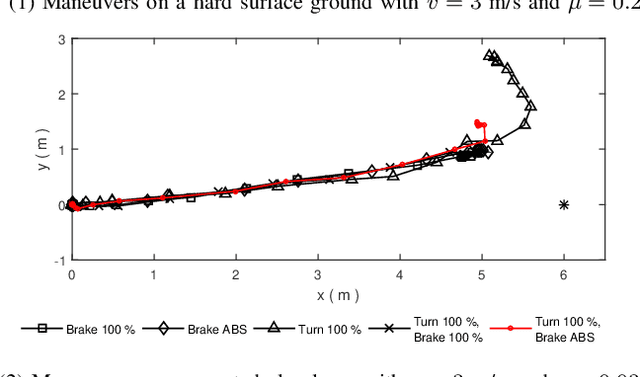
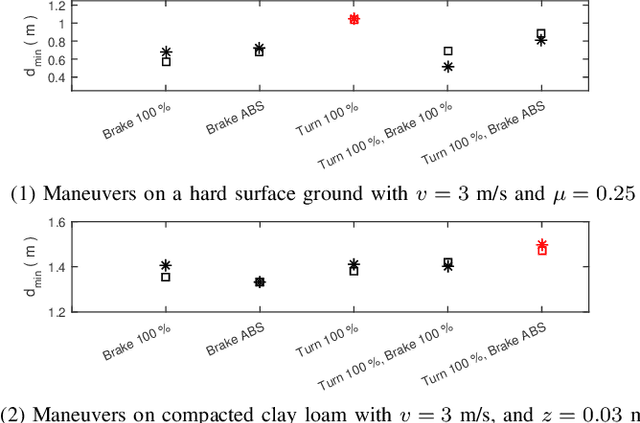
Winter conditions, characterized by the presence of ice and snow on the ground, are more likely to lead to road accidents. This paper presents an experimental proof of concept of a collision avoidance algorithm for vehicles evolving in low adhesion conditions, implemented on a 1/5th scale car platform. In the proposed approach, a model-based estimator first processes the high-dimensional sensors data of the IMU, LIDAR and encoders to estimate physically relevant vehicle and ground conditions parameters such as the inertial velocity of the vehicle $v$, the friction coefficient $\mu$, the cohesion $c$ and the internal shear angle $\phi$. Then, a data-driven predictor is trained to predict the optimal maneuver to perform in the situation characterized by the estimated parameters. Experiments show that it is possible to 1) produce a real-time estimate of the relevant ground parameters, and 2) determine an optimal collision avoidance maneuver based on the estimated parameters.