 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLeveraging Natural Load Dynamics with Variable Gear-ratio Actuators
Paper and Code
May 23, 2024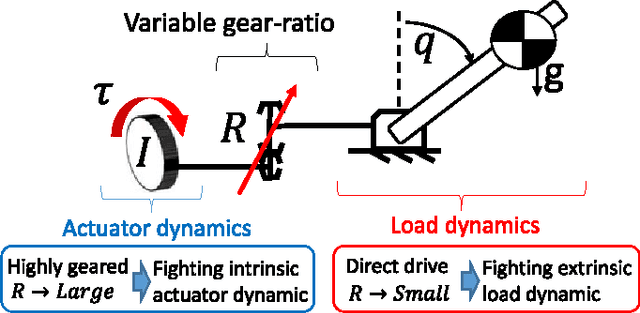
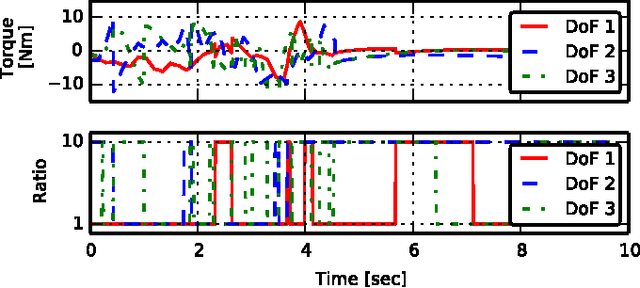
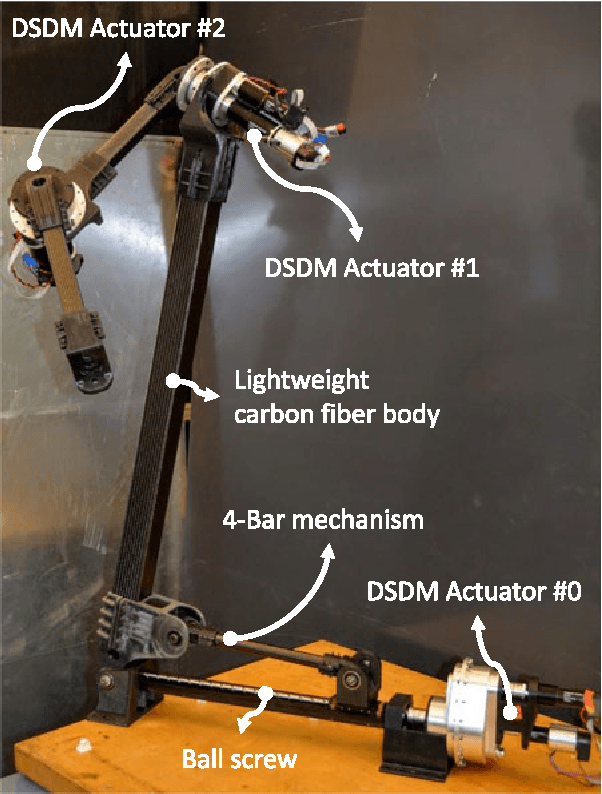
This paper presents a robotic system where the gear-ratio of an actuator is dynamically changed to either leverage or attenuate the natural load dynamics. Based on this principle, lightweight robotic systems can be made fast and strong; exploiting the natural load dynamics for moving at higher speeds (small reduction ratio), while also able to bear a large load through the attenuation of the load dynamics (large reduction ratio). A model-based control algorithm to automatically select the optimal gear-ratios that minimize the total actuator torques for an arbitrary dynamic state and expected uncertainty level is proposed. Also, a novel 3-DoF robot arm using custom actuators with two discrete gear-ratios is presented. The advantages of gear-shifting dynamically are demonstrated through experiments and simulations. Results show that actively changing the gear-ratio using the proposed control algorithms can lead to an order-of-magnitude reduction of necessary actuator torque and power, and also increase robustness to disturbances.