 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSoft Two-degree-of-freedom Dielectric Elastomer Position Sensor Exhibiting Linear Behavior
May 27, 2024



Soft robots could bring robotic systems to new horizons, by enabling safe human-machine interaction. For precise control, these soft structures require high level position feedback that is not easily achieved through conventional one-degree-of-freedom (DOF) sensing apparatus. In this paper, a soft two-DOF dielectric elastomer (DE) sensor is specifically designed to provide accurate position feedback for a soft polymer robotic manipulator. The technology is exemplified on a soft robot intended for MRI-guided prostate interventions. DEs are chosen for their major advantages of softness, high strains, low cost and embedded multiple-DOF sensing capability, providing excellent system integration. A geometrical model of the proposed DE sensor is developed and compared to experimental results in order to understand sensor mechanics. Using a differential measurement approach, a handmade prototype provided linear sensory behavior and 0.2 mm accuracy on two-DOF. This correlates to a 0.7\% error over the sensor's 30 mm x 30 mm planar range, demonstrating the outstanding potential of DE technology for accurate multi-DOF position sensing.
Performance Study of Low Inertia Magnetorheological Actuators for Kinesthetic Haptic Devices
Jun 01, 2022
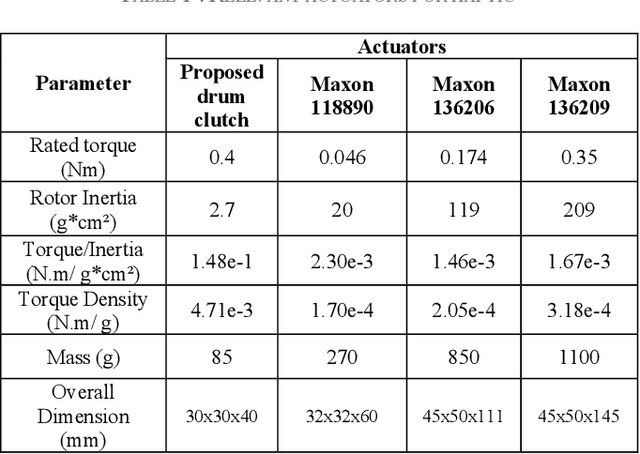


A challenge to high quality virtual reality (VR) simulations is the development of high-fidelity haptic devices that can render a wide range of impedances at both low and high frequencies. To this end, a thorough analytical and experimental assessment of the performance of magnetorheological (MR) actuators is performed and compared to electric motor (EM) actuation. A 2 degrees-of-freedom dynamic model of a kinesthetic haptic device is used to conduct the analytical study comparing the rendering area, rendering bandwidth, gearing and scaling of both technologies. Simulation predictions are corroborated by experimental validation over a wide range of operating conditions. Results show that, for a same output force, MR actuators can render a bandwidth over 52.9% higher than electric motors due to their low inertia. Unlike electric motors, the performance of MR actuators for use in haptic devices are not limited by their output inertia but by their viscous damping, which must be carefully addressed at the design stage.