 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeShared Control Based on Extended Lipschitz Analysis With Application to Human-Superlimb Collaboration
Sep 01, 2023This paper presents a quantitative method to construct voluntary manual control and sensor-based reactive control in human-robot collaboration based on Lipschitz conditions. To collaborate with a human, the robot observes the human's motions and predicts a desired action. This predictor is constructed from data of human demonstrations observed through the robot's sensors. Analysis of demonstration data based on Lipschitz quotients evaluates a) whether the desired action is predictable and b) to what extent the action is predictable. If the quotients are low for all the input-output pairs of demonstration data, a predictor can be constructed with a smooth function. In dealing with human demonstration data, however, the Lipschitz quotients tend to be very high in some situations due to the discrepancy between the information that humans use and the one robots can obtain. This paper a) presents a method for seeking missing information or a new variable that can lower the Lipschitz quotients by adding the new variable to the input space, and b) constructs a human-robot shared control system based on the Lipschitz analysis. Those predictable situations are assigned to the robot's reactive control, while human voluntary control is assigned to those situations where the Lipschitz quotients are high even after the new variable is added. The latter situations are deemed unpredictable and are rendered to the human. This human-robot shared control method is applied to assist hemiplegic patients in a bimanual eating task with a Supernumerary Robotic Limb, which works in concert with an unaffected functional hand.
Towards Robotic Feeding: Role of Haptics in Fork-based Food Manipulation
Feb 24, 2019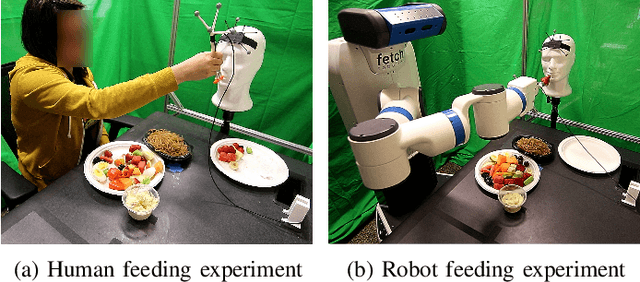

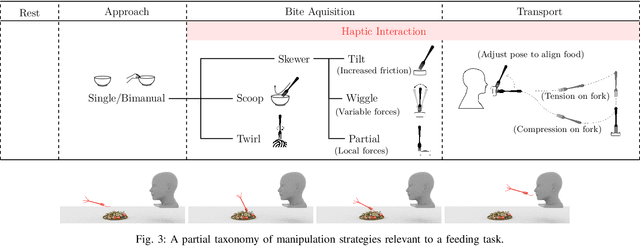

Autonomous feeding is challenging because it requires manipulation of food items with various compliance, sizes, and shapes. To understand how humans manipulate food items during feeding and to explore ways to adapt their strategies to robots, we collected a rich dataset of human trajectories by asking them to pick up food and feed it to a mannequin. From the analysis of the collected haptic and motion signals, we demonstrate that humans adapt their control policies to accommodate to the compliance and shape of the food item being acquired. We propose a taxonomy of manipulation strategies for feeding to highlight such policies. As a first step to generate compliance-dependent policies, we propose a set of classifiers for compliance-based food categorization from haptic and motion signals. We compare these human manipulation strategies with fixed position-control policies via a robot. Our analysis of success and failure cases of human and robot policies further highlights the importance of adapting the policy to the compliance of a food item.
* 8 pages