 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMagnetic Milli-spinner for Robotic Endovascular Surgery
Oct 28, 2024



Vascular diseases such as thrombosis, atherosclerosis, and aneurysm, which can lead to blockage of blood flow or blood vessel rupture, are common and life-threatening. Conventional minimally invasive treatments utilize catheters, or long tubes, to guide small devices or therapeutic agents to targeted regions for intervention. Unfortunately, catheters suffer from difficult and unreliable navigation in narrow, winding vessels such as those found in the brain. Magnetically actuated untethered robots, which have been extensively explored as an alternative, are promising for navigation in complex vasculatures and vascular disease treatments. Most current robots, however, cannot swim against high flows or are inadequate in treating certain conditions. Here, we introduce a multifunctional and magnetically actuated milli-spinner robot for rapid navigation and performance of various treatments in complicated vasculatures. The milli-spinner, with a unique hollow structure including helical fins and slits for propulsion, generates a distinct flow field upon spinning. The milli-spinner is the fastest-ever untethered magnetic robot for movement in tubular environments, easily achieving speeds of 23 cm/s, demonstrating promise as an untethered medical device for effective navigation in blood vessels and robotic treatment of numerous vascular diseases.
Physics-aware differentiable design of magnetically actuated kirigami for shape morphing
Aug 09, 2023Shape morphing that transforms morphologies in response to stimuli is crucial for future multifunctional systems. While kirigami holds great promise in enhancing shape-morphing, existing designs primarily focus on kinematics and overlook the underlying physics. This study introduces a differentiable inverse design framework that considers the physical interplay between geometry, materials, and stimuli of active kirigami, made by soft material embedded with magnetic particles, to realize target shape-morphing upon magnetic excitation. We achieve this by combining differentiable kinematics and energy models into a constrained optimization, simultaneously designing the cuts and magnetization orientations to ensure kinematic and physical feasibility. Complex kirigami designs are obtained automatically with unparallel efficiency, which can be remotely controlled to morph into intricate target shapes and even multiple states. The proposed framework can be extended to accommodate various active systems, bridging geometry and physics to push the frontiers in shape-morphing applications, like flexible electronics and minimally invasive surgery.
Stiffness Change for Reconfiguration of Inflated Beam Robots
Jul 06, 2023



Active control of the shape of soft robots is challenging. Despite having an infinite number of passive degrees of freedom (DOFs), soft robots typically only have a few actively controllable DOFs, limited by the number of degrees of actuation (DOAs). The complexity of actuators restricts the number of DOAs that can be incorporated into soft robots. Active shape control is further complicated by the buckling of soft robots under compressive forces; this is particularly challenging for compliant continuum robots due to their long aspect ratios. In this work, we show how variable stiffness can enable shape control of soft robots by addressing these challenges. Dynamically changing the stiffness of sections along a compliant continuum robot can selectively "activate" discrete joints. By changing which joints are activated, the output of a single actuator can be reconfigured to actively control many different joints, thus decoupling the number of controllable DOFs from the number of DOAs. We demonstrate embedded positive pressure layer jamming as a simple method for stiffness change in inflated beam robots, its compatibility with growing robots, and its use as an "activating" technology. We experimentally characterize the stiffness change in a growing inflated beam robot and present finite element models which serve as guides for robot design and fabrication. We fabricate a multi-segment everting inflated beam robot and demonstrate how stiffness change is compatible with growth through tip eversion, enables an increase in workspace, and achieves new actuation patterns not possible without stiffening.
Efficient and Accurate Co-Visible Region Localization with Matching Key-Points Crop (MKPC): A Two-Stage Pipeline for Enhancing Image Matching Performance
Mar 24, 2023
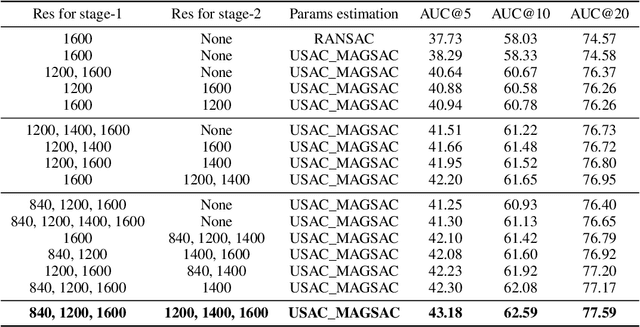


Image matching is a classic and fundamental task in computer vision. In this paper, under the hypothesis that the areas outside the co-visible regions carry little information, we propose a matching key-points crop (MKPC) algorithm. The MKPC locates, proposes and crops the critical regions, which are the co-visible areas with great efficiency and accuracy. Furthermore, building upon MKPC, we propose a general two-stage pipeline for image matching, which is compatible to any image matching models or combinations. We experimented with plugging SuperPoint + SuperGlue into the two-stage pipeline, whose results show that our method enhances the performance for outdoor pose estimations. What's more, in a fair comparative condition, our method outperforms the SOTA on Image Matching Challenge 2022 Benchmark, which represents the hardest outdoor benchmark of image matching currently.
Spinning-enabled Wireless Amphibious Origami Millirobot
Mar 18, 2022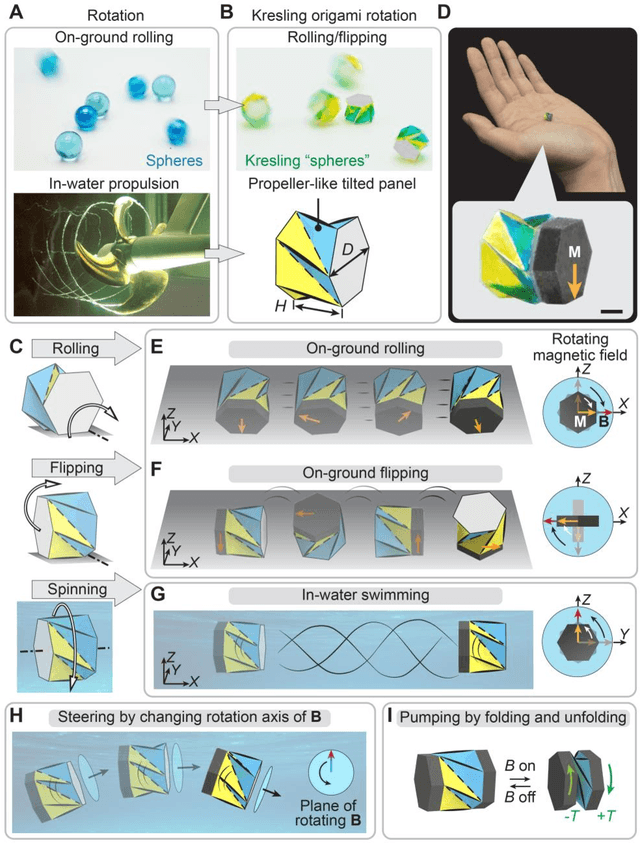
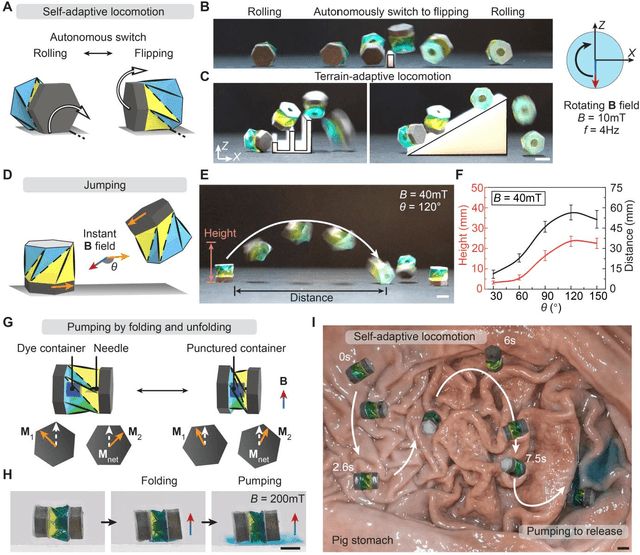
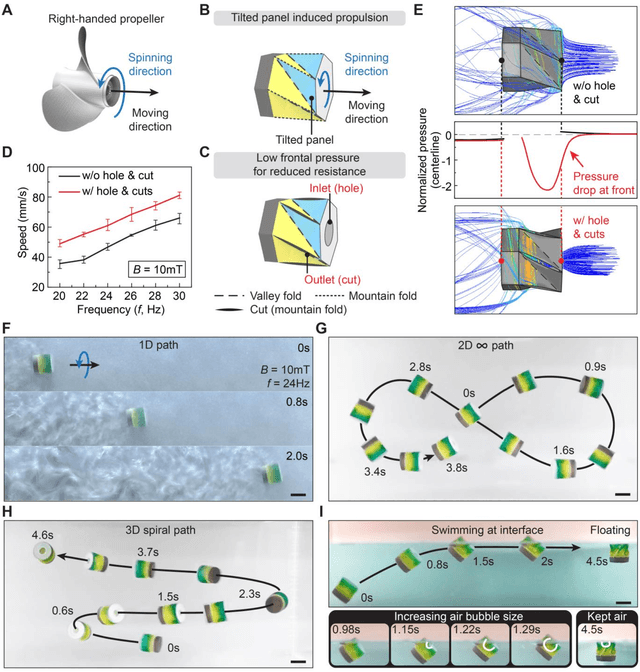
Wireless millimeter-scale origami robots that can locomote in narrow spaces and morph their shapes have recently been explored with great potential for biomedical applications. Existing millimeter-scale origami devices usually require separate geometrical components for locomotion and functions, which increases the complexity of the robotic systems and their operation upon limited locomotion modes. Additionally, none of them can achieve both on-ground and in-water locomotion. Here we report a magnetically actuated amphibious origami millirobot that integrates capabilities of spinning-enabled multimodal locomotion, controlled delivery of liquid medicine, and cargo transportation with wireless operation. This millirobot takes full advantage of the geometrical features and folding/unfolding capability of Kresling origami, a triangulated hollow cylinder, to fulfill multifunction: its geometrical features are exploited for generating omnidirectional locomotion in various working environments, including on unstructured ground, in liquids, and at air-liquid interfaces through rolling, flipping, and spinning-induced propulsion; the folding/unfolding is utilized as a pumping mechanism for integrated multifunctionality such as controlled delivery of liquid medicine; furthermore, the spinning motion provides a sucking mechanism for targeted solid cargo transportation. This origami millirobot breaks the conventional way of utilizing origami folding only for shape reconfiguration and integrates multiple functions in one simple body. We anticipate the reported magnetic amphibious origami millirobots have the potential to serve as minimally invasive devices for biomedical diagnoses and treatments.