 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeEfficient and Accurate Co-Visible Region Localization with Matching Key-Points Crop (MKPC): A Two-Stage Pipeline for Enhancing Image Matching Performance
Paper and Code
Mar 24, 2023
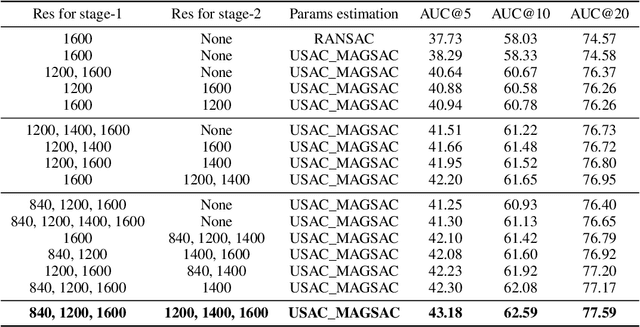


Image matching is a classic and fundamental task in computer vision. In this paper, under the hypothesis that the areas outside the co-visible regions carry little information, we propose a matching key-points crop (MKPC) algorithm. The MKPC locates, proposes and crops the critical regions, which are the co-visible areas with great efficiency and accuracy. Furthermore, building upon MKPC, we propose a general two-stage pipeline for image matching, which is compatible to any image matching models or combinations. We experimented with plugging SuperPoint + SuperGlue into the two-stage pipeline, whose results show that our method enhances the performance for outdoor pose estimations. What's more, in a fair comparative condition, our method outperforms the SOTA on Image Matching Challenge 2022 Benchmark, which represents the hardest outdoor benchmark of image matching currently.