 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA systematic dataset generation technique applied to data-driven automotive aerodynamics
Aug 14, 2024



A novel strategy for generating datasets is developed within the context of drag prediction for automotive geometries using neural networks. A primary challenge in this space is constructing a training databse of sufficient size and diversity. Our method relies on a small number of starting data points, and provides a recipe to interpolate systematically between them, generating an arbitrary number of samples at the desired quality. We test this strategy using a realistic automotive geometry, and demonstrate that convolutional neural networks perform exceedingly well at predicting drag coefficients and surface pressures. Promising results are obtained in testing extrapolation performance. Our method can be applied to other problems of aerodynamic shape optimization.
Compositional Generative Inverse Design
Jan 24, 2024



Inverse design, where we seek to design input variables in order to optimize an underlying objective function, is an important problem that arises across fields such as mechanical engineering to aerospace engineering. Inverse design is typically formulated as an optimization problem, with recent works leveraging optimization across learned dynamics models. However, as models are optimized they tend to fall into adversarial modes, preventing effective sampling. We illustrate that by instead optimizing over the learned energy function captured by the diffusion model, we can avoid such adversarial examples and significantly improve design performance. We further illustrate how such a design system is compositional, enabling us to combine multiple different diffusion models representing subcomponents of our desired system to design systems with every specified component. In an N-body interaction task and a challenging 2D multi-airfoil design task, we demonstrate that by composing the learned diffusion model at test time, our method allows us to design initial states and boundary shapes that are more complex than those in the training data. Our method outperforms state-of-the-art neural inverse design method by an average of 41.5% in prediction MAE and 14.3% in design objective for the N-body dataset and discovers formation flying to minimize drag in the multi-airfoil design task. Project website and code can be found at https://github.com/AI4Science-WestlakeU/cindm.
Machine Learning to Predict Aerodynamic Stall
Jul 07, 2022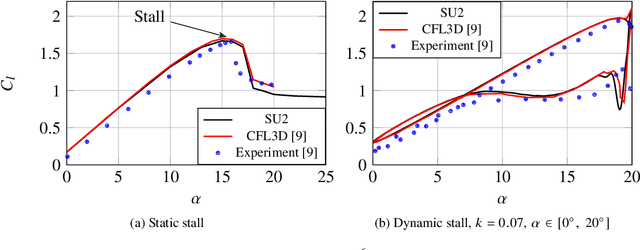
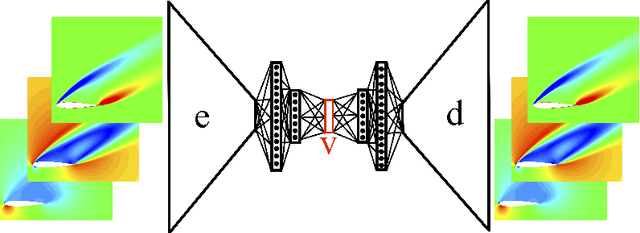
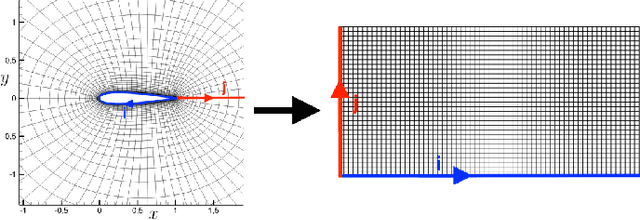
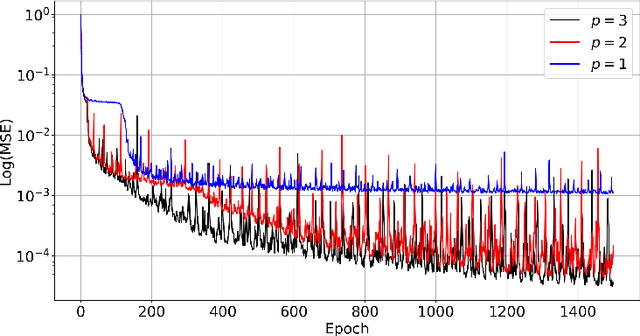
A convolutional autoencoder is trained using a database of airfoil aerodynamic simulations and assessed in terms of overall accuracy and interpretability. The goal is to predict the stall and to investigate the ability of the autoencoder to distinguish between the linear and non-linear response of the airfoil pressure distribution to changes in the angle of attack. After a sensitivity analysis on the learning infrastructure, we investigate the latent space identified by the autoencoder targeting extreme compression rates, i.e. very low-dimensional reconstructions. We also propose a strategy to use the decoder to generate new synthetic airfoil geometries and aerodynamic solutions by interpolation and extrapolation in the latent representation learned by the autoencoder.
Spinning-enabled Wireless Amphibious Origami Millirobot
Mar 18, 2022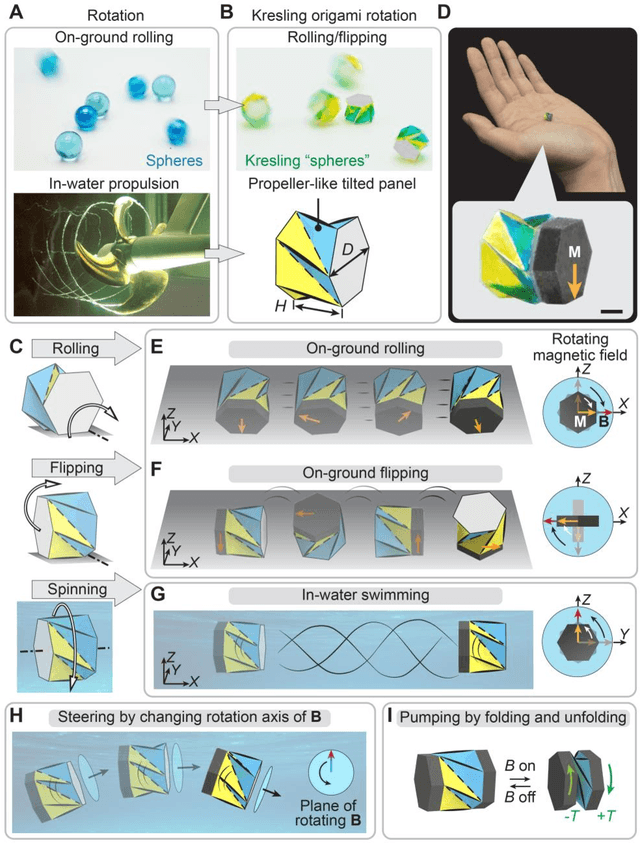
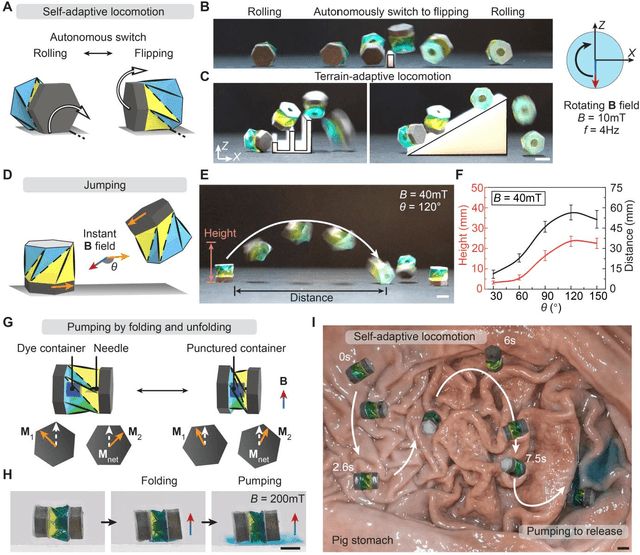
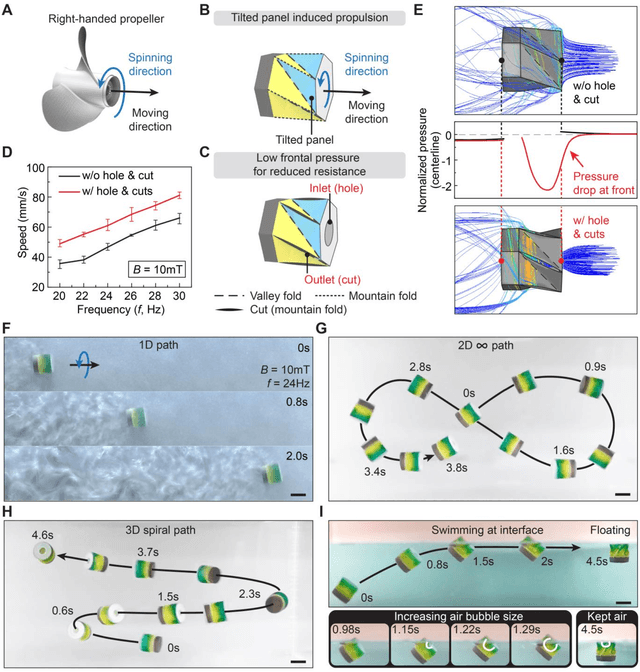
Wireless millimeter-scale origami robots that can locomote in narrow spaces and morph their shapes have recently been explored with great potential for biomedical applications. Existing millimeter-scale origami devices usually require separate geometrical components for locomotion and functions, which increases the complexity of the robotic systems and their operation upon limited locomotion modes. Additionally, none of them can achieve both on-ground and in-water locomotion. Here we report a magnetically actuated amphibious origami millirobot that integrates capabilities of spinning-enabled multimodal locomotion, controlled delivery of liquid medicine, and cargo transportation with wireless operation. This millirobot takes full advantage of the geometrical features and folding/unfolding capability of Kresling origami, a triangulated hollow cylinder, to fulfill multifunction: its geometrical features are exploited for generating omnidirectional locomotion in various working environments, including on unstructured ground, in liquids, and at air-liquid interfaces through rolling, flipping, and spinning-induced propulsion; the folding/unfolding is utilized as a pumping mechanism for integrated multifunctionality such as controlled delivery of liquid medicine; furthermore, the spinning motion provides a sucking mechanism for targeted solid cargo transportation. This origami millirobot breaks the conventional way of utilizing origami folding only for shape reconfiguration and integrates multiple functions in one simple body. We anticipate the reported magnetic amphibious origami millirobots have the potential to serve as minimally invasive devices for biomedical diagnoses and treatments.
Optimization Under Uncertainty Using the Generalized Inverse Distribution Function
Jul 17, 2014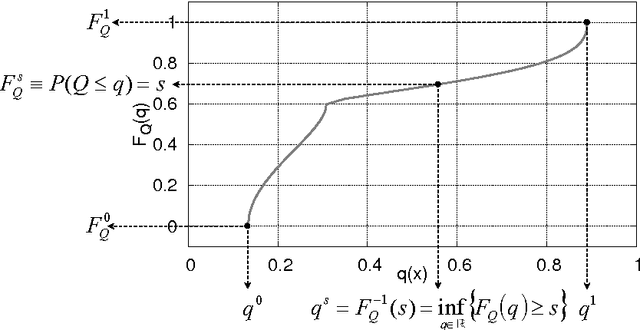

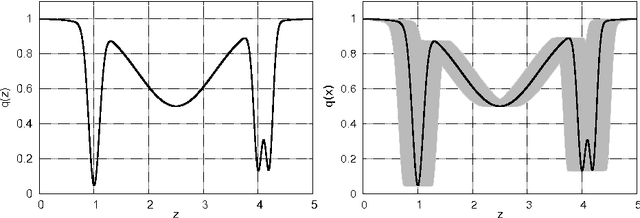

A framework for robust optimization under uncertainty based on the use of the generalized inverse distribution function (GIDF), also called quantile function, is here proposed. Compared to more classical approaches that rely on the usage of statistical moments as deterministic attributes that define the objectives of the optimization process, the inverse cumulative distribution function allows for the use of all the possible information available in the probabilistic domain. Furthermore, the use of a quantile based approach leads naturally to a multi-objective methodology which allows an a-posteriori selection of the candidate design based on risk/opportunity criteria defined by the designer. Finally, the error on the estimation of the objectives due to the resolution of the GIDF will be proven to be quantifiable