 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeFrom Uncertain to Safe: Conformal Fine-Tuning of Diffusion Models for Safe PDE Control
Feb 04, 2025



The application of deep learning for partial differential equation (PDE)-constrained control is gaining increasing attention. However, existing methods rarely consider safety requirements crucial in real-world applications. To address this limitation, we propose Safe Diffusion Models for PDE Control (SafeDiffCon), which introduce the uncertainty quantile as model uncertainty quantification to achieve optimal control under safety constraints through both post-training and inference phases. Firstly, our approach post-trains a pre-trained diffusion model to generate control sequences that better satisfy safety constraints while achieving improved control objectives via a reweighted diffusion loss, which incorporates the uncertainty quantile estimated using conformal prediction. Secondly, during inference, the diffusion model dynamically adjusts both its generation process and parameters through iterative guidance and fine-tuning, conditioned on control targets while simultaneously integrating the estimated uncertainty quantile. We evaluate SafeDiffCon on three control tasks: 1D Burgers' equation, 2D incompressible fluid, and controlled nuclear fusion problem. Results demonstrate that SafeDiffCon is the only method that satisfies all safety constraints, whereas other classical and deep learning baselines fail. Furthermore, while adhering to safety constraints, SafeDiffCon achieves the best control performance.
Wavelet Diffusion Neural Operator
Dec 06, 2024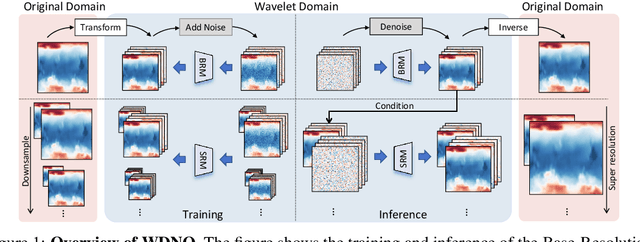
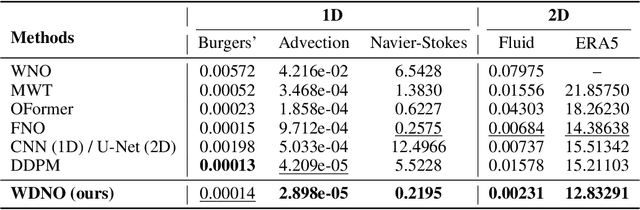
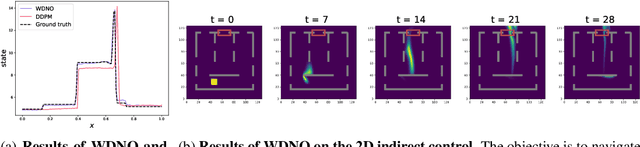
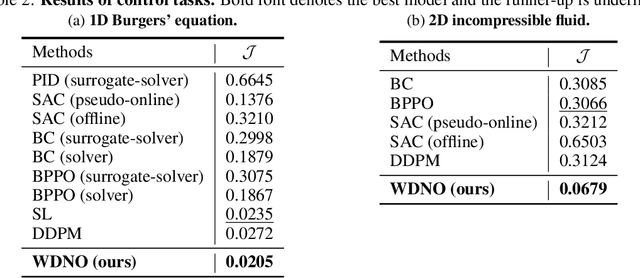
Simulating and controlling physical systems described by partial differential equations (PDEs) are crucial tasks across science and engineering. Recently, diffusion generative models have emerged as a competitive class of methods for these tasks due to their ability to capture long-term dependencies and model high-dimensional states. However, diffusion models typically struggle with handling system states with abrupt changes and generalizing to higher resolutions. In this work, we propose Wavelet Diffusion Neural Operator (WDNO), a novel PDE simulation and control framework that enhances the handling of these complexities. WDNO comprises two key innovations. Firstly, WDNO performs diffusion-based generative modeling in the wavelet domain for the entire trajectory to handle abrupt changes and long-term dependencies effectively. Secondly, to address the issue of poor generalization across different resolutions, which is one of the fundamental tasks in modeling physical systems, we introduce multi-resolution training. We validate WDNO on five physical systems, including 1D advection equation, three challenging physical systems with abrupt changes (1D Burgers' equation, 1D compressible Navier-Stokes equation and 2D incompressible fluid), and a real-world dataset ERA5, which demonstrates superior performance on both simulation and control tasks over state-of-the-art methods, with significant improvements in long-term and detail prediction accuracy. Remarkably, in the challenging context of the 2D high-dimensional and indirect control task aimed at reducing smoke leakage, WDNO reduces the leakage by 33.2% compared to the second-best baseline.
Recent Advances on Machine Learning for Computational Fluid Dynamics: A Survey
Aug 22, 2024This paper explores the recent advancements in enhancing Computational Fluid Dynamics (CFD) tasks through Machine Learning (ML) techniques. We begin by introducing fundamental concepts, traditional methods, and benchmark datasets, then examine the various roles ML plays in improving CFD. The literature systematically reviews papers in recent five years and introduces a novel classification for forward modeling: Data-driven Surrogates, Physics-Informed Surrogates, and ML-assisted Numerical Solutions. Furthermore, we also review the latest ML methods in inverse design and control, offering a novel classification and providing an in-depth discussion. Then we highlight real-world applications of ML for CFD in critical scientific and engineering disciplines, including aerodynamics, combustion, atmosphere & ocean science, biology fluid, plasma, symbolic regression, and reduced order modeling. Besides, we identify key challenges and advocate for future research directions to address these challenges, such as multi-scale representation, physical knowledge encoding, scientific foundation model and automatic scientific discovery. This review serves as a guide for the rapidly expanding ML for CFD community, aiming to inspire insights for future advancements. We draw the conclusion that ML is poised to significantly transform CFD research by enhancing simulation accuracy, reducing computational time, and enabling more complex analyses of fluid dynamics. The paper resources can be viewed at https://github.com/WillDreamer/Awesome-AI4CFD.
Closed-loop Diffusion Control of Complex Physical Systems
Jul 31, 2024



The control problems of complex physical systems have wide applications in science and engineering. Several previous works have demonstrated that generative control methods based on diffusion models have significant advantages for solving these problems. However, existing generative control methods face challenges in handling closed-loop control, which is an inherent constraint for effective control of complex physical systems. In this paper, we propose a Closed-Loop Diffusion method for Physical systems Control (CL-DiffPhyCon). By adopting an asynchronous denoising schedule for different time steps, CL-DiffPhyCon generates control signals conditioned on real-time feedback from the environment. Thus, CL-DiffPhyCon is able to speed up diffusion control methods in a closed-loop framework. We evaluate CL-DiffPhyCon on the 1D Burgers' equation control and 2D incompressible fluid control tasks. The results demonstrate that CL-DiffPhyCon achieves notable control performance with significant sampling acceleration.
A Generative Approach to Control Complex Physical Systems
Jul 09, 2024



Controlling the evolution of complex physical systems is a fundamental task across science and engineering. Classical techniques suffer from limited applicability or huge computational costs. On the other hand, recent deep learning and reinforcement learning-based approaches often struggle to optimize long-term control sequences under the constraints of system dynamics. In this work, we introduce Diffusion Physical systems Control (DiffPhyCon), a new class of method to address the physical systems control problem. DiffPhyCon excels by simultaneously minimizing both the learned generative energy function and the predefined control objectives across the entire trajectory and control sequence. Thus, it can explore globally and identify near-optimal control sequences. Moreover, we enhance DiffPhyCon with prior reweighting, enabling the discovery of control sequences that significantly deviate from the training distribution. We test our method in 1D Burgers' equation and 2D jellyfish movement control in a fluid environment. Our method outperforms widely applied classical approaches and state-of-the-art deep learning and reinforcement learning methods. Notably, DiffPhyCon unveils an intriguing fast-close-slow-open pattern observed in the jellyfish, aligning with established findings in the field of fluid dynamics.
Compositional Generative Inverse Design
Jan 24, 2024



Inverse design, where we seek to design input variables in order to optimize an underlying objective function, is an important problem that arises across fields such as mechanical engineering to aerospace engineering. Inverse design is typically formulated as an optimization problem, with recent works leveraging optimization across learned dynamics models. However, as models are optimized they tend to fall into adversarial modes, preventing effective sampling. We illustrate that by instead optimizing over the learned energy function captured by the diffusion model, we can avoid such adversarial examples and significantly improve design performance. We further illustrate how such a design system is compositional, enabling us to combine multiple different diffusion models representing subcomponents of our desired system to design systems with every specified component. In an N-body interaction task and a challenging 2D multi-airfoil design task, we demonstrate that by composing the learned diffusion model at test time, our method allows us to design initial states and boundary shapes that are more complex than those in the training data. Our method outperforms state-of-the-art neural inverse design method by an average of 41.5% in prediction MAE and 14.3% in design objective for the N-body dataset and discovers formation flying to minimize drag in the multi-airfoil design task. Project website and code can be found at https://github.com/AI4Science-WestlakeU/cindm.
Progressive Transfer Learning for Person Re-identification
Aug 08, 2019
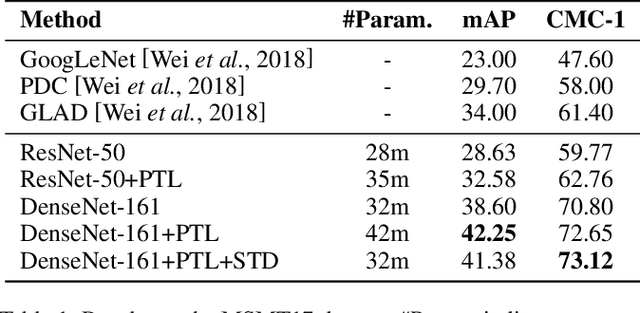
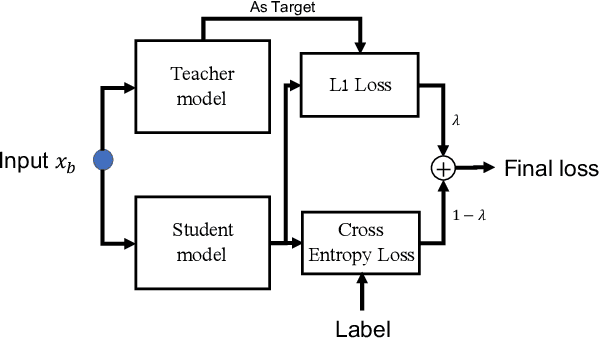
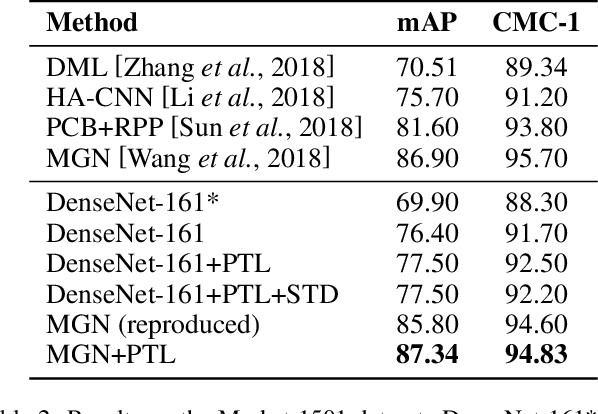
Model fine-tuning is a widely used transfer learning approach in person Re-identification (ReID) applications, which fine-tuning a pre-trained feature extraction model into the target scenario instead of training a model from scratch. It is challenging due to the significant variations inside the target scenario, e.g., different camera viewpoint, illumination changes, and occlusion. These variations result in a gap between the distribution of each mini-batch and the distribution of the whole dataset when using mini-batch training. In this paper, we study model fine-tuning from the perspective of the aggregation and utilization of the global information of the dataset when using mini-batch training. Specifically, we introduce a novel network structure called Batch-related Convolutional Cell (BConv-Cell), which progressively collects the global information of the dataset into a latent state and uses this latent state to rectify the extracted feature. Based on BConv-Cells, we further proposed the Progressive Transfer Learning (PTL) method to facilitate the model fine-tuning process by joint training the BConv-Cells and the pre-trained ReID model. Empirical experiments show that our proposal can improve the performance of the ReID model greatly on MSMT17, Market-1501, CUHK03 and DukeMTMC-reID datasets. The code will be released later on at \url{https://github.com/ZJULearning/PTL}