 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMitigating Gradient Pathology in PINNs through Aligned Constraint
May 24, 2026While Physics-Informed Neural Networks (PINNs) are powerful for solving Partial Differential Equations (PDEs), their training is often paralyzed by gradient pathology. The gradients from the PDE residuals and boundary constraints oppose each other, trapping the model in local minima. Current solutions, such as adaptive weighting or hard constraints, either fail to fundamentally resolve this ill-conditioning or are limited to simple geometries. In this study, we systematically analyze the possible causes of this gradient pathology from the perspectives of loss landscapes and optimization dynamics. Based on the obtained conclusion, we propose Constraint-Aligned loss with Manifold Lifting (CAML). By reformulating all zeroth-order terms into aligned constraints, our method effectively mitigates gradient conflicts. In addition, we introduce a delay factor to help the optimizer skip the high-curvature area. Experiments demonstrate that our CAML significantly enhances numerical stability and efficiency in highly complex PINN problems. Our code is open-sourced on https://github.com/YichenLuo-0/CAML.
PACE: Geometry-Aware Bridge Transport for Single-Cell Trajectory Inference
May 18, 2026Single-cell trajectory inference from destructive time-course snapshots is fundamentally ill-posed: neither cross-time cell correspondences nor continuous trajectories are observed, so the snapshot distributions alone do not uniquely determine the underlying dynamics. Existing optimal transport and flow-based methods typically couple cells by Euclidean proximity at observed clock times, which can misalign trajectories when development is asynchronous and cells sampled at the same experimental time occupy different latent pseudotime stages. We propose PACE, a trajectory inference framework that recovers geometry-consistent continuous transport dynamics from destructive time-course snapshots through three coupled components. First, PACE constructs a state- and time-dependent anisotropic Riemannian metric that assigns low transport cost along locally supported tangent directions while penalizing normal velocity components. Second, it alternates between refining cross-time couplings under the induced path-action cost and fitting endpoint-preserving neural bridges between adjacent snapshots. Third, it distills the learned bridge dynamics into a global continuous-time velocity field over cellular states. Across seven controlled and biological datasets covering nine held-out reconstruction experiments, PACE achieves the strongest overall reconstruction performance, reducing MMD, Wasserstein-1 distance, and Wasserstein-2 distance by 23.7% on average relative to the strongest competing baseline. PACE also improves RNA-velocity alignment by 15.4% on an embryoid body differentiation benchmark, without requiring explicit cell pairing, lineage tracing, or RNA-velocity supervision during training. Code is available at https://github.com/AI4Science-WestlakeU/PACE.
scDFM: Distributional Flow Matching Model for Robust Single-Cell Perturbation Prediction
Feb 06, 2026A central goal in systems biology and drug discovery is to predict the transcriptional response of cells to perturbations. This task is challenging due to the noisy and sparse nature of single-cell measurements, as well as the fact that perturbations often induce population-level shifts rather than changes in individual cells. Existing deep learning methods typically assume cell-level correspondences, limiting their ability to capture such global effects. We present scDFM, a generative framework based on conditional flow matching that models the full distribution of perturbed cells conditioned on control states. By incorporating a maximum mean discrepancy (MMD) objective, our method aligns perturbed and control populations beyond cell-level correspondences. To further improve robustness to sparsity and noise, we introduce the Perturbation-Aware Differential Transformer (PAD-Transformer), a backbone architecture that leverages gene interaction graphs and differential attention to capture context-specific expression changes. Across multiple genetic and drug perturbation benchmarks, scDFM consistently outperforms prior methods, demonstrating strong generalization in both unseen and combinatorial settings. In the combinatorial setting, it reduces mean squared error by 19.6% relative to the strongest baseline. These results highlight the importance of distribution-level generative modeling for robust in silico perturbation prediction. The code is available at https://github.com/AI4Science-WestlakeU/scDFM
Neural Predictor-Corrector: Solving Homotopy Problems with Reinforcement Learning
Feb 03, 2026The Homotopy paradigm, a general principle for solving challenging problems, appears across diverse domains such as robust optimization, global optimization, polynomial root-finding, and sampling. Practical solvers for these problems typically follow a predictor-corrector (PC) structure, but rely on hand-crafted heuristics for step sizes and iteration termination, which are often suboptimal and task-specific. To address this, we unify these problems under a single framework, which enables the design of a general neural solver. Building on this unified view, we propose Neural Predictor-Corrector (NPC), which replaces hand-crafted heuristics with automatically learned policies. NPC formulates policy selection as a sequential decision-making problem and leverages reinforcement learning to automatically discover efficient strategies. To further enhance generalization, we introduce an amortized training mechanism, enabling one-time offline training for a class of problems and efficient online inference on new instances. Experiments on four representative homotopy problems demonstrate that our method generalizes effectively to unseen instances. It consistently outperforms classical and specialized baselines in efficiency while demonstrating superior stability across tasks, highlighting the value of unifying homotopy methods into a single neural framework.
GenCP: Towards Generative Modeling Paradigm of Coupled Physics
Jan 27, 2026Real-world physical systems are inherently complex, often involving the coupling of multiple physics, making their simulation both highly valuable and challenging. Many mainstream approaches face challenges when dealing with decoupled data. Besides, they also suffer from low efficiency and fidelity in strongly coupled spatio-temporal physical systems. Here we propose GenCP, a novel and elegant generative paradigm for coupled multiphysics simulation. By formulating coupled-physics modeling as a probability modeling problem, our key innovation is to integrate probability density evolution in generative modeling with iterative multiphysics coupling, thereby enabling training on data from decoupled simulation and inferring coupled physics during sampling. We also utilize operator-splitting theory in the space of probability evolution to establish error controllability guarantees for this "conditional-to-joint" sampling scheme. We evaluate our paradigm on a synthetic setting and three challenging multi-physics scenarios to demonstrate both principled insight and superior application performance of GenCP. Code is available at this repo: github.com/AI4Science-WestlakeU/GenCP.
RealPDEBench: A Benchmark for Complex Physical Systems with Real-World Data
Jan 05, 2026Predicting the evolution of complex physical systems remains a central problem in science and engineering. Despite rapid progress in scientific Machine Learning (ML) models, a critical bottleneck is the lack of expensive real-world data, resulting in most current models being trained and validated on simulated data. Beyond limiting the development and evaluation of scientific ML, this gap also hinders research into essential tasks such as sim-to-real transfer. We introduce RealPDEBench, the first benchmark for scientific ML that integrates real-world measurements with paired numerical simulations. RealPDEBench consists of five datasets, three tasks, eight metrics, and ten baselines. We first present five real-world measured datasets with paired simulated datasets across different complex physical systems. We further define three tasks, which allow comparisons between real-world and simulated data, and facilitate the development of methods to bridge the two. Moreover, we design eight evaluation metrics, spanning data-oriented and physics-oriented metrics, and finally benchmark ten representative baselines, including state-of-the-art models, pretrained PDE foundation models, and a traditional method. Experiments reveal significant discrepancies between simulated and real-world data, while showing that pretraining with simulated data consistently improves both accuracy and convergence. In this work, we hope to provide insights from real-world data, advancing scientific ML toward bridging the sim-to-real gap and real-world deployment. Our benchmark, datasets, and instructions are available at https://realpdebench.github.io/.
GGBall: Graph Generative Model on Poincaré Ball
Jun 08, 2025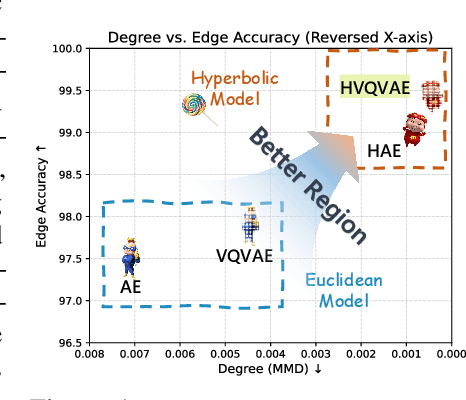
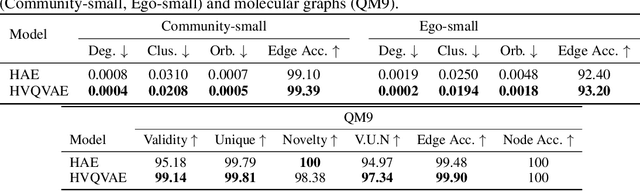
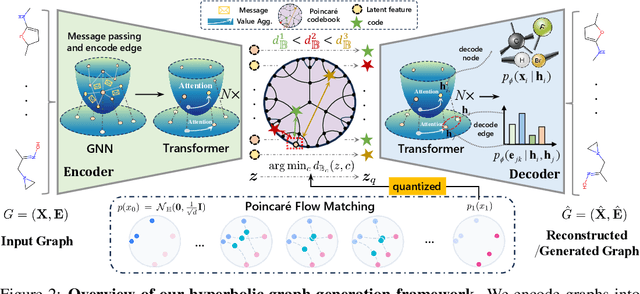
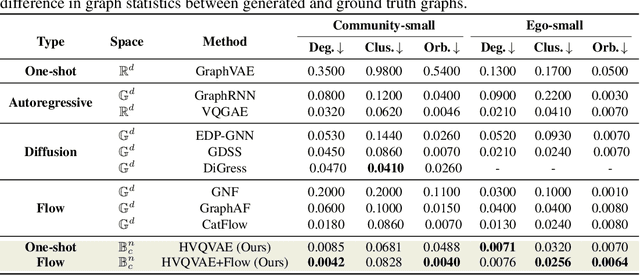
Generating graphs with hierarchical structures remains a fundamental challenge due to the limitations of Euclidean geometry in capturing exponential complexity. Here we introduce \textbf{GGBall}, a novel hyperbolic framework for graph generation that integrates geometric inductive biases with modern generative paradigms. GGBall combines a Hyperbolic Vector-Quantized Autoencoder (HVQVAE) with a Riemannian flow matching prior defined via closed-form geodesics. This design enables flow-based priors to model complex latent distributions, while vector quantization helps preserve the curvature-aware structure of the hyperbolic space. We further develop a suite of hyperbolic GNN and Transformer layers that operate entirely within the manifold, ensuring stability and scalability. Empirically, our model reduces degree MMD by over 75\% on Community-Small and over 40\% on Ego-Small compared to state-of-the-art baselines, demonstrating an improved ability to preserve topological hierarchies. These results highlight the potential of hyperbolic geometry as a powerful foundation for the generative modeling of complex, structured, and hierarchical data domains. Our code is available at \href{https://github.com/AI4Science-WestlakeU/GGBall}{here}.
EqCollide: Equivariant and Collision-Aware Deformable Objects Neural Simulator
Jun 06, 2025Simulating collisions of deformable objects is a fundamental yet challenging task due to the complexity of modeling solid mechanics and multi-body interactions. Existing data-driven methods often suffer from lack of equivariance to physical symmetries, inadequate handling of collisions, and limited scalability. Here we introduce EqCollide, the first end-to-end equivariant neural fields simulator for deformable objects and their collisions. We propose an equivariant encoder to map object geometry and velocity into latent control points. A subsequent equivariant Graph Neural Network-based Neural Ordinary Differential Equation models the interactions among control points via collision-aware message passing. To reconstruct velocity fields, we query a neural field conditioned on control point features, enabling continuous and resolution-independent motion predictions. Experimental results show that EqCollide achieves accurate, stable, and scalable simulations across diverse object configurations, and our model achieves 24.34% to 35.82% lower rollout MSE even compared with the best-performing baseline model. Furthermore, our model could generalize to more colliding objects and extended temporal horizons, and stay robust to input transformed with group action.
From Uncertain to Safe: Conformal Fine-Tuning of Diffusion Models for Safe PDE Control
Feb 04, 2025



The application of deep learning for partial differential equation (PDE)-constrained control is gaining increasing attention. However, existing methods rarely consider safety requirements crucial in real-world applications. To address this limitation, we propose Safe Diffusion Models for PDE Control (SafeDiffCon), which introduce the uncertainty quantile as model uncertainty quantification to achieve optimal control under safety constraints through both post-training and inference phases. Firstly, our approach post-trains a pre-trained diffusion model to generate control sequences that better satisfy safety constraints while achieving improved control objectives via a reweighted diffusion loss, which incorporates the uncertainty quantile estimated using conformal prediction. Secondly, during inference, the diffusion model dynamically adjusts both its generation process and parameters through iterative guidance and fine-tuning, conditioned on control targets while simultaneously integrating the estimated uncertainty quantile. We evaluate SafeDiffCon on three control tasks: 1D Burgers' equation, 2D incompressible fluid, and controlled nuclear fusion problem. Results demonstrate that SafeDiffCon is the only method that satisfies all safety constraints, whereas other classical and deep learning baselines fail. Furthermore, while adhering to safety constraints, SafeDiffCon achieves the best control performance.
T-SCEND: Test-time Scalable MCTS-enhanced Diffusion Model
Feb 04, 2025



We introduce Test-time Scalable MCTS-enhanced Diffusion Model (T-SCEND), a novel framework that significantly improves diffusion model's reasoning capabilities with better energy-based training and scaling up test-time computation. We first show that na\"ively scaling up inference budget for diffusion models yields marginal gain. To address this, the training of T-SCEND consists of a novel linear-regression negative contrastive learning objective to improve the performance-energy consistency of the energy landscape, and a KL regularization to reduce adversarial sampling. During inference, T-SCEND integrates the denoising process with a novel hybrid Monte Carlo Tree Search (hMCTS), which sequentially performs best-of-N random search and MCTS as denoising proceeds. On challenging reasoning tasks of Maze and Sudoku, we demonstrate the effectiveness of T-SCEND's training objective and scalable inference method. In particular, trained with Maze sizes of up to $6\times6$, our T-SCEND solves $88\%$ of Maze problems with much larger sizes of $15\times15$, while standard diffusion completely fails.Code to reproduce the experiments can be found at https://github.com/AI4Science-WestlakeU/t_scend.