 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeWiener Chaos Expansion based Neural Operator for Singular Stochastic Partial Differential Equations
Mar 09, 2026In this paper, we explore how our recently developed Wiener Chaos Expansion (WCE)-based neural operator (NO) can be applied to singular stochastic partial differential equations, e.g., the dynamic $\boldsymbolΦ^4_2$ model simulated in the recent works. Unlike the previous WCE-NO which solves SPDEs by simply inserting Wick-Hermite features into the backbone NO model, we leverage feature-wise linear modulation (FiLM) to appropriately capture the dependency between the solution of singular SPDE and its smooth remainder. The resulting WCE-FiLM-NO shows excellent performance on $\boldsymbolΦ^4_2$, as measured by relative $L_2$ loss, out-of-distribution $L_2$ loss, and autocorrelation score; all without the help of renormalisation factor. In addition, we also show the potential of simulating $\boldsymbolΦ^4_3$ data, which is more aligned with real scientific practice in statistical quantum field theory. To the best of our knowledge, this is among the first works to develop an efficient data-driven surrogate for the dynamical $\boldsymbolΦ^4_3$ model.
RealPDEBench: A Benchmark for Complex Physical Systems with Real-World Data
Jan 05, 2026Predicting the evolution of complex physical systems remains a central problem in science and engineering. Despite rapid progress in scientific Machine Learning (ML) models, a critical bottleneck is the lack of expensive real-world data, resulting in most current models being trained and validated on simulated data. Beyond limiting the development and evaluation of scientific ML, this gap also hinders research into essential tasks such as sim-to-real transfer. We introduce RealPDEBench, the first benchmark for scientific ML that integrates real-world measurements with paired numerical simulations. RealPDEBench consists of five datasets, three tasks, eight metrics, and ten baselines. We first present five real-world measured datasets with paired simulated datasets across different complex physical systems. We further define three tasks, which allow comparisons between real-world and simulated data, and facilitate the development of methods to bridge the two. Moreover, we design eight evaluation metrics, spanning data-oriented and physics-oriented metrics, and finally benchmark ten representative baselines, including state-of-the-art models, pretrained PDE foundation models, and a traditional method. Experiments reveal significant discrepancies between simulated and real-world data, while showing that pretraining with simulated data consistently improves both accuracy and convergence. In this work, we hope to provide insights from real-world data, advancing scientific ML toward bridging the sim-to-real gap and real-world deployment. Our benchmark, datasets, and instructions are available at https://realpdebench.github.io/.
On the Guidance of Flow Matching
Feb 04, 2025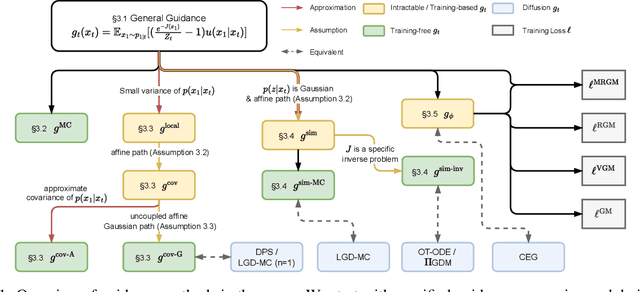
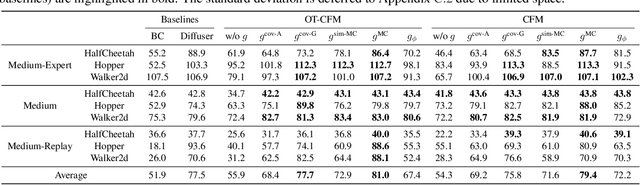
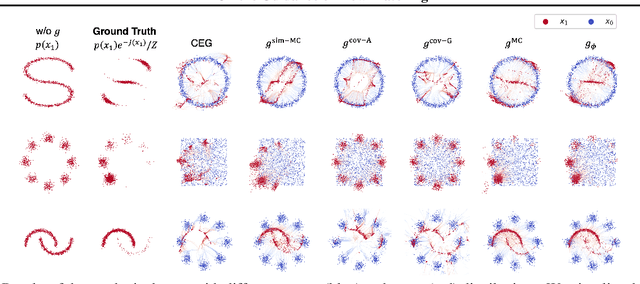
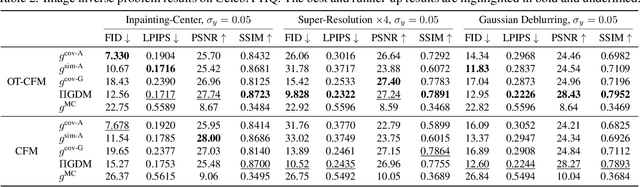
Flow matching has shown state-of-the-art performance in various generative tasks, ranging from image generation to decision-making, where guided generation is pivotal. However, the guidance of flow matching is more general than and thus substantially different from that of its predecessor, diffusion models. Therefore, the challenge in guidance for general flow matching remains largely underexplored. In this paper, we propose the first framework of general guidance for flow matching. From this framework, we derive a family of guidance techniques that can be applied to general flow matching. These include a new training-free asymptotically exact guidance, novel training losses for training-based guidance, and two classes of approximate guidance that cover classical gradient guidance methods as special cases. We theoretically investigate these different methods to give a practical guideline for choosing suitable methods in different scenarios. Experiments on synthetic datasets, image inverse problems, and offline reinforcement learning demonstrate the effectiveness of our proposed guidance methods and verify the correctness of our flow matching guidance framework. Code to reproduce the experiments can be found at https://github.com/AI4Science-WestlakeU/flow_guidance.
From Uncertain to Safe: Conformal Fine-Tuning of Diffusion Models for Safe PDE Control
Feb 04, 2025



The application of deep learning for partial differential equation (PDE)-constrained control is gaining increasing attention. However, existing methods rarely consider safety requirements crucial in real-world applications. To address this limitation, we propose Safe Diffusion Models for PDE Control (SafeDiffCon), which introduce the uncertainty quantile as model uncertainty quantification to achieve optimal control under safety constraints through both post-training and inference phases. Firstly, our approach post-trains a pre-trained diffusion model to generate control sequences that better satisfy safety constraints while achieving improved control objectives via a reweighted diffusion loss, which incorporates the uncertainty quantile estimated using conformal prediction. Secondly, during inference, the diffusion model dynamically adjusts both its generation process and parameters through iterative guidance and fine-tuning, conditioned on control targets while simultaneously integrating the estimated uncertainty quantile. We evaluate SafeDiffCon on three control tasks: 1D Burgers' equation, 2D incompressible fluid, and controlled nuclear fusion problem. Results demonstrate that SafeDiffCon is the only method that satisfies all safety constraints, whereas other classical and deep learning baselines fail. Furthermore, while adhering to safety constraints, SafeDiffCon achieves the best control performance.
Wavelet Diffusion Neural Operator
Dec 06, 2024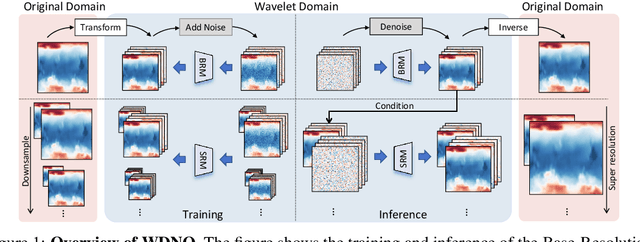
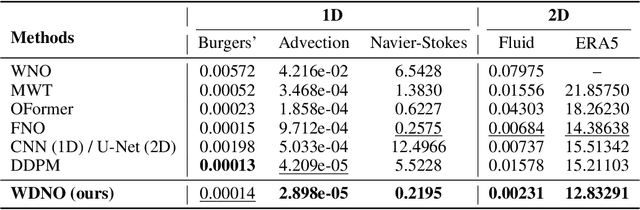
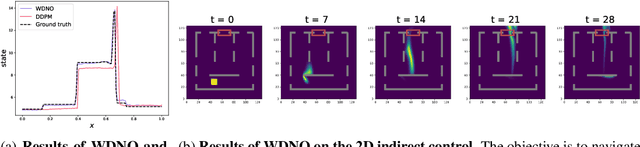
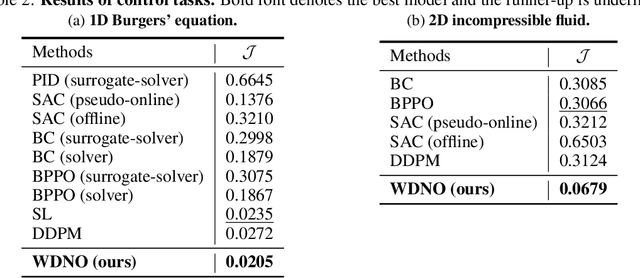
Simulating and controlling physical systems described by partial differential equations (PDEs) are crucial tasks across science and engineering. Recently, diffusion generative models have emerged as a competitive class of methods for these tasks due to their ability to capture long-term dependencies and model high-dimensional states. However, diffusion models typically struggle with handling system states with abrupt changes and generalizing to higher resolutions. In this work, we propose Wavelet Diffusion Neural Operator (WDNO), a novel PDE simulation and control framework that enhances the handling of these complexities. WDNO comprises two key innovations. Firstly, WDNO performs diffusion-based generative modeling in the wavelet domain for the entire trajectory to handle abrupt changes and long-term dependencies effectively. Secondly, to address the issue of poor generalization across different resolutions, which is one of the fundamental tasks in modeling physical systems, we introduce multi-resolution training. We validate WDNO on five physical systems, including 1D advection equation, three challenging physical systems with abrupt changes (1D Burgers' equation, 1D compressible Navier-Stokes equation and 2D incompressible fluid), and a real-world dataset ERA5, which demonstrates superior performance on both simulation and control tasks over state-of-the-art methods, with significant improvements in long-term and detail prediction accuracy. Remarkably, in the challenging context of the 2D high-dimensional and indirect control task aimed at reducing smoke leakage, WDNO reduces the leakage by 33.2% compared to the second-best baseline.
Multimodal Policies with Physics-informed Representations
Oct 20, 2024



In the control problems of the PDE systems, observation is important to make the decision. However, the observation is generally sparse and missing in practice due to the limitation and fault of sensors. The above challenges cause observations with uncertain quantities and modalities. Therefore, how to leverage the uncertain observations as the states in control problems of the PDE systems has become a scientific problem. The dynamics of PDE systems rely on the initial conditions, boundary conditions, and PDE formula. Given the above three elements, PINNs can be used to solve the PDE systems. In this work, we discover that the neural network can also be used to identify and represent the PDE systems using PDE loss and sparse data loss. Inspired by the above discovery, we propose a Physics-Informed Representation (PIR) algorithm for multimodal policies in PDE systems' control. It leverages PDE loss to fit the neural network and data loss calculated on the observations with random quantities and modalities to propagate the information of initial conditions and boundary conditions into the inputs. The inputs can be the learnable parameters or the output of the encoders. Then, under the environments of the PDE systems, such inputs are the representation of the current state. In our experiments, the PIR illustrates the superior consistency with the features of the ground truth compared with baselines, even when there are missing modalities. Furthermore, PIR has been successfully applied in the downstream control tasks where the robot leverages the learned state by PIR faster and more accurately, passing through the complex vortex street from a random starting location to reach a random target.
Recent Advances on Machine Learning for Computational Fluid Dynamics: A Survey
Aug 22, 2024This paper explores the recent advancements in enhancing Computational Fluid Dynamics (CFD) tasks through Machine Learning (ML) techniques. We begin by introducing fundamental concepts, traditional methods, and benchmark datasets, then examine the various roles ML plays in improving CFD. The literature systematically reviews papers in recent five years and introduces a novel classification for forward modeling: Data-driven Surrogates, Physics-Informed Surrogates, and ML-assisted Numerical Solutions. Furthermore, we also review the latest ML methods in inverse design and control, offering a novel classification and providing an in-depth discussion. Then we highlight real-world applications of ML for CFD in critical scientific and engineering disciplines, including aerodynamics, combustion, atmosphere & ocean science, biology fluid, plasma, symbolic regression, and reduced order modeling. Besides, we identify key challenges and advocate for future research directions to address these challenges, such as multi-scale representation, physical knowledge encoding, scientific foundation model and automatic scientific discovery. This review serves as a guide for the rapidly expanding ML for CFD community, aiming to inspire insights for future advancements. We draw the conclusion that ML is poised to significantly transform CFD research by enhancing simulation accuracy, reducing computational time, and enabling more complex analyses of fluid dynamics. The paper resources can be viewed at https://github.com/WillDreamer/Awesome-AI4CFD.
Closed-loop Diffusion Control of Complex Physical Systems
Jul 31, 2024



The control problems of complex physical systems have wide applications in science and engineering. Several previous works have demonstrated that generative control methods based on diffusion models have significant advantages for solving these problems. However, existing generative control methods face challenges in handling closed-loop control, which is an inherent constraint for effective control of complex physical systems. In this paper, we propose a Closed-Loop Diffusion method for Physical systems Control (CL-DiffPhyCon). By adopting an asynchronous denoising schedule for different time steps, CL-DiffPhyCon generates control signals conditioned on real-time feedback from the environment. Thus, CL-DiffPhyCon is able to speed up diffusion control methods in a closed-loop framework. We evaluate CL-DiffPhyCon on the 1D Burgers' equation control and 2D incompressible fluid control tasks. The results demonstrate that CL-DiffPhyCon achieves notable control performance with significant sampling acceleration.
A Generative Approach to Control Complex Physical Systems
Jul 09, 2024



Controlling the evolution of complex physical systems is a fundamental task across science and engineering. Classical techniques suffer from limited applicability or huge computational costs. On the other hand, recent deep learning and reinforcement learning-based approaches often struggle to optimize long-term control sequences under the constraints of system dynamics. In this work, we introduce Diffusion Physical systems Control (DiffPhyCon), a new class of method to address the physical systems control problem. DiffPhyCon excels by simultaneously minimizing both the learned generative energy function and the predefined control objectives across the entire trajectory and control sequence. Thus, it can explore globally and identify near-optimal control sequences. Moreover, we enhance DiffPhyCon with prior reweighting, enabling the discovery of control sequences that significantly deviate from the training distribution. We test our method in 1D Burgers' equation and 2D jellyfish movement control in a fluid environment. Our method outperforms widely applied classical approaches and state-of-the-art deep learning and reinforcement learning methods. Notably, DiffPhyCon unveils an intriguing fast-close-slow-open pattern observed in the jellyfish, aligning with established findings in the field of fluid dynamics.
Better Neural PDE Solvers Through Data-Free Mesh Movers
Dec 09, 2023Recently, neural networks have been extensively employed to solve partial differential equations (PDEs) in physical system modeling. While major studies focus on learning system evolution on predefined static mesh discretizations, some methods utilize reinforcement learning or supervised learning techniques to create adaptive and dynamic meshes, due to the dynamic nature of these systems. However, these approaches face two primary challenges: (1) the need for expensive optimal mesh data, and (2) the change of the solution space's degree of freedom and topology during mesh refinement. To address these challenges, this paper proposes a neural PDE solver with a neural mesh adapter. To begin with, we introduce a novel data-free neural mesh adaptor, called Data-free Mesh Mover (DMM), with two main innovations. Firstly, it is an operator that maps the solution to adaptive meshes and is trained using the Monge-Ampere equation without optimal mesh data. Secondly, it dynamically changes the mesh by moving existing nodes rather than adding or deleting nodes and edges. Theoretical analysis shows that meshes generated by DMM have the lowest interpolation error bound. Based on DMM, to efficiently and accurately model dynamic systems, we develop a moving mesh based neural PDE solver (MM-PDE) that embeds the moving mesh with a two-branch architecture and a learnable interpolation framework to preserve information within the data. Empirical experiments demonstrate that our method generates suitable meshes and considerably enhances accuracy when modeling widely considered PDE systems.