 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeGenCP: Towards Generative Modeling Paradigm of Coupled Physics
Jan 27, 2026Real-world physical systems are inherently complex, often involving the coupling of multiple physics, making their simulation both highly valuable and challenging. Many mainstream approaches face challenges when dealing with decoupled data. Besides, they also suffer from low efficiency and fidelity in strongly coupled spatio-temporal physical systems. Here we propose GenCP, a novel and elegant generative paradigm for coupled multiphysics simulation. By formulating coupled-physics modeling as a probability modeling problem, our key innovation is to integrate probability density evolution in generative modeling with iterative multiphysics coupling, thereby enabling training on data from decoupled simulation and inferring coupled physics during sampling. We also utilize operator-splitting theory in the space of probability evolution to establish error controllability guarantees for this "conditional-to-joint" sampling scheme. We evaluate our paradigm on a synthetic setting and three challenging multi-physics scenarios to demonstrate both principled insight and superior application performance of GenCP. Code is available at this repo: github.com/AI4Science-WestlakeU/GenCP.
T-SCEND: Test-time Scalable MCTS-enhanced Diffusion Model
Feb 04, 2025



We introduce Test-time Scalable MCTS-enhanced Diffusion Model (T-SCEND), a novel framework that significantly improves diffusion model's reasoning capabilities with better energy-based training and scaling up test-time computation. We first show that na\"ively scaling up inference budget for diffusion models yields marginal gain. To address this, the training of T-SCEND consists of a novel linear-regression negative contrastive learning objective to improve the performance-energy consistency of the energy landscape, and a KL regularization to reduce adversarial sampling. During inference, T-SCEND integrates the denoising process with a novel hybrid Monte Carlo Tree Search (hMCTS), which sequentially performs best-of-N random search and MCTS as denoising proceeds. On challenging reasoning tasks of Maze and Sudoku, we demonstrate the effectiveness of T-SCEND's training objective and scalable inference method. In particular, trained with Maze sizes of up to $6\times6$, our T-SCEND solves $88\%$ of Maze problems with much larger sizes of $15\times15$, while standard diffusion completely fails.Code to reproduce the experiments can be found at https://github.com/AI4Science-WestlakeU/t_scend.
From Uncertain to Safe: Conformal Fine-Tuning of Diffusion Models for Safe PDE Control
Feb 04, 2025



The application of deep learning for partial differential equation (PDE)-constrained control is gaining increasing attention. However, existing methods rarely consider safety requirements crucial in real-world applications. To address this limitation, we propose Safe Diffusion Models for PDE Control (SafeDiffCon), which introduce the uncertainty quantile as model uncertainty quantification to achieve optimal control under safety constraints through both post-training and inference phases. Firstly, our approach post-trains a pre-trained diffusion model to generate control sequences that better satisfy safety constraints while achieving improved control objectives via a reweighted diffusion loss, which incorporates the uncertainty quantile estimated using conformal prediction. Secondly, during inference, the diffusion model dynamically adjusts both its generation process and parameters through iterative guidance and fine-tuning, conditioned on control targets while simultaneously integrating the estimated uncertainty quantile. We evaluate SafeDiffCon on three control tasks: 1D Burgers' equation, 2D incompressible fluid, and controlled nuclear fusion problem. Results demonstrate that SafeDiffCon is the only method that satisfies all safety constraints, whereas other classical and deep learning baselines fail. Furthermore, while adhering to safety constraints, SafeDiffCon achieves the best control performance.
On the Guidance of Flow Matching
Feb 04, 2025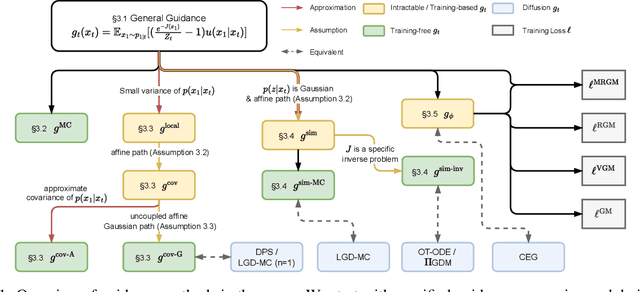
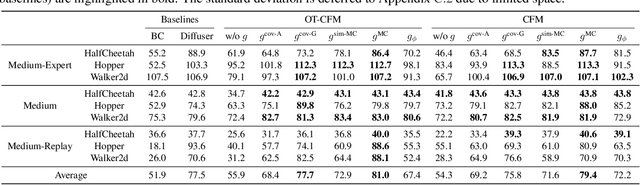
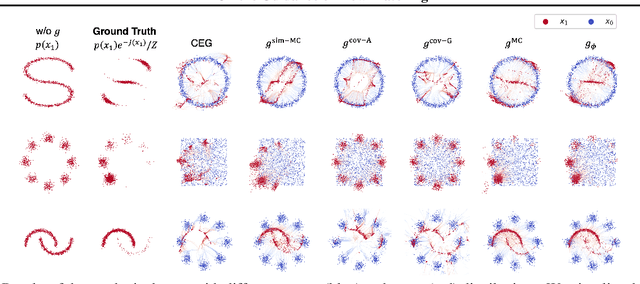
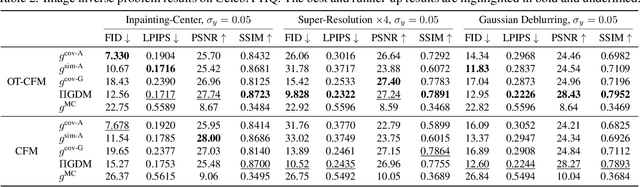
Flow matching has shown state-of-the-art performance in various generative tasks, ranging from image generation to decision-making, where guided generation is pivotal. However, the guidance of flow matching is more general than and thus substantially different from that of its predecessor, diffusion models. Therefore, the challenge in guidance for general flow matching remains largely underexplored. In this paper, we propose the first framework of general guidance for flow matching. From this framework, we derive a family of guidance techniques that can be applied to general flow matching. These include a new training-free asymptotically exact guidance, novel training losses for training-based guidance, and two classes of approximate guidance that cover classical gradient guidance methods as special cases. We theoretically investigate these different methods to give a practical guideline for choosing suitable methods in different scenarios. Experiments on synthetic datasets, image inverse problems, and offline reinforcement learning demonstrate the effectiveness of our proposed guidance methods and verify the correctness of our flow matching guidance framework. Code to reproduce the experiments can be found at https://github.com/AI4Science-WestlakeU/flow_guidance.
Wavelet Diffusion Neural Operator
Dec 06, 2024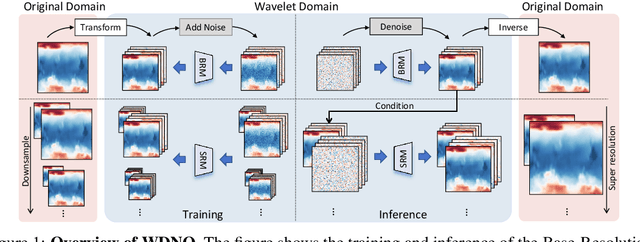
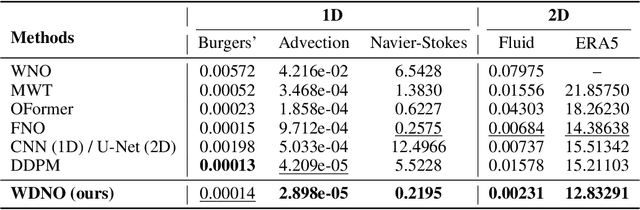
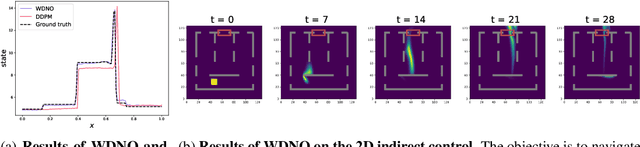
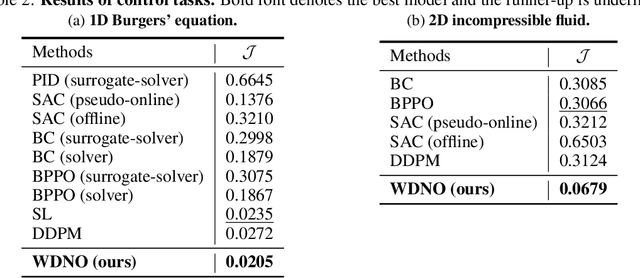
Simulating and controlling physical systems described by partial differential equations (PDEs) are crucial tasks across science and engineering. Recently, diffusion generative models have emerged as a competitive class of methods for these tasks due to their ability to capture long-term dependencies and model high-dimensional states. However, diffusion models typically struggle with handling system states with abrupt changes and generalizing to higher resolutions. In this work, we propose Wavelet Diffusion Neural Operator (WDNO), a novel PDE simulation and control framework that enhances the handling of these complexities. WDNO comprises two key innovations. Firstly, WDNO performs diffusion-based generative modeling in the wavelet domain for the entire trajectory to handle abrupt changes and long-term dependencies effectively. Secondly, to address the issue of poor generalization across different resolutions, which is one of the fundamental tasks in modeling physical systems, we introduce multi-resolution training. We validate WDNO on five physical systems, including 1D advection equation, three challenging physical systems with abrupt changes (1D Burgers' equation, 1D compressible Navier-Stokes equation and 2D incompressible fluid), and a real-world dataset ERA5, which demonstrates superior performance on both simulation and control tasks over state-of-the-art methods, with significant improvements in long-term and detail prediction accuracy. Remarkably, in the challenging context of the 2D high-dimensional and indirect control task aimed at reducing smoke leakage, WDNO reduces the leakage by 33.2% compared to the second-best baseline.
Closed-loop Diffusion Control of Complex Physical Systems
Jul 31, 2024



The control problems of complex physical systems have wide applications in science and engineering. Several previous works have demonstrated that generative control methods based on diffusion models have significant advantages for solving these problems. However, existing generative control methods face challenges in handling closed-loop control, which is an inherent constraint for effective control of complex physical systems. In this paper, we propose a Closed-Loop Diffusion method for Physical systems Control (CL-DiffPhyCon). By adopting an asynchronous denoising schedule for different time steps, CL-DiffPhyCon generates control signals conditioned on real-time feedback from the environment. Thus, CL-DiffPhyCon is able to speed up diffusion control methods in a closed-loop framework. We evaluate CL-DiffPhyCon on the 1D Burgers' equation control and 2D incompressible fluid control tasks. The results demonstrate that CL-DiffPhyCon achieves notable control performance with significant sampling acceleration.
A Generative Approach to Control Complex Physical Systems
Jul 09, 2024



Controlling the evolution of complex physical systems is a fundamental task across science and engineering. Classical techniques suffer from limited applicability or huge computational costs. On the other hand, recent deep learning and reinforcement learning-based approaches often struggle to optimize long-term control sequences under the constraints of system dynamics. In this work, we introduce Diffusion Physical systems Control (DiffPhyCon), a new class of method to address the physical systems control problem. DiffPhyCon excels by simultaneously minimizing both the learned generative energy function and the predefined control objectives across the entire trajectory and control sequence. Thus, it can explore globally and identify near-optimal control sequences. Moreover, we enhance DiffPhyCon with prior reweighting, enabling the discovery of control sequences that significantly deviate from the training distribution. We test our method in 1D Burgers' equation and 2D jellyfish movement control in a fluid environment. Our method outperforms widely applied classical approaches and state-of-the-art deep learning and reinforcement learning methods. Notably, DiffPhyCon unveils an intriguing fast-close-slow-open pattern observed in the jellyfish, aligning with established findings in the field of fluid dynamics.
Robust Graph Neural Networks via Unbiased Aggregation
Nov 25, 2023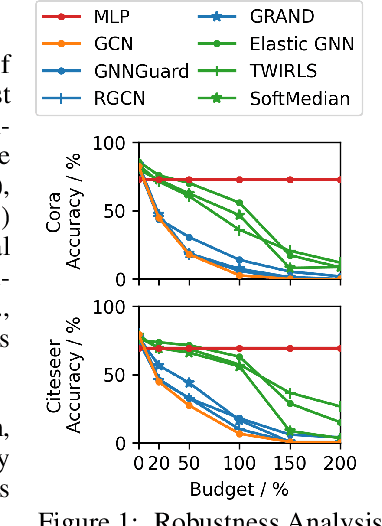
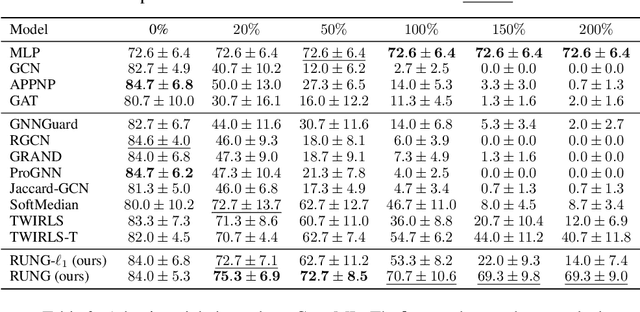
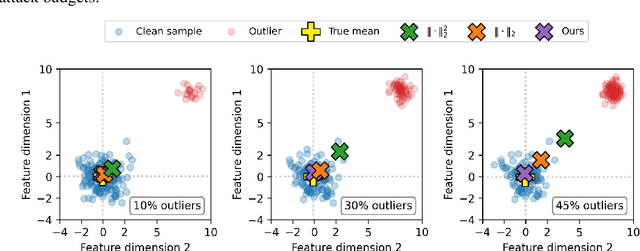
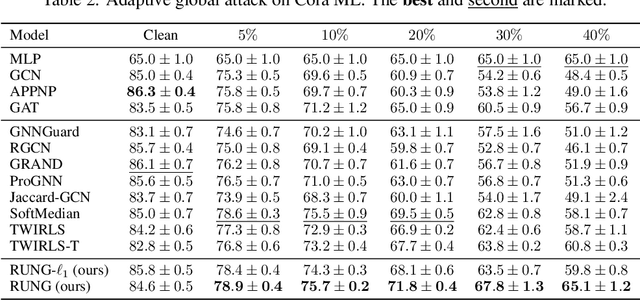
The adversarial robustness of Graph Neural Networks (GNNs) has been questioned due to the false sense of security uncovered by strong adaptive attacks despite the existence of numerous defenses. In this work, we delve into the robustness analysis of representative robust GNNs and provide a unified robust estimation point of view to understand their robustness and limitations. Our novel analysis of estimation bias motivates the design of a robust and unbiased graph signal estimator. We then develop an efficient Quasi-Newton iterative reweighted least squares algorithm to solve the estimation problem, which unfolds as robust unbiased aggregation layers in GNNs with a theoretical convergence guarantee. Our comprehensive experiments confirm the strong robustness of our proposed model, and the ablation study provides a deep understanding of its advantages.