 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeModel selection and real-time skill assessment for suturing in robotic surgery
Jan 17, 2026Automated feedback systems have the potential to provide objective skill assessment for training and evaluation in robot-assisted surgery. In this study, we examine methods to achieve real-time prediction of surgical skill level in real-time based on Objective Structured Assessment of Technical Skills (OSATS) scores. Using data acquired from the da Vinci Surgical System, we carry out three main analyses, focusing on model design, their real-time performance, and their skill-level-based cross-validation training. For the model design, we evaluate the effectiveness of multimodal deep learning models for predicting surgical skill levels using synchronized kinematic and vision data. Our models include separate unimodal baselines and fusion architectures that integrate features from both modalities and are evaluated using mean Spearman's correlation coefficients, demonstrating that the fusion model consistently outperforms unimodal models for real-time predictions. For the real-time performance, we observe the prediction's trend over time and highlight correlation with the surgeon's gestures. For the skill-level-based cross-validation, we separately trained models on surgeons with different skill levels, which showed that high-skill demonstrations allow for better performance than those trained on low-skilled ones and generalize well to similarly skilled participants. Our findings show that multimodal learning allows more stable fine-grained evaluation of surgical performance and highlights the value of expert-level training data for model generalization.
AutoCam: Hierarchical Path Planning for an Autonomous Auxiliary Camera in Surgical Robotics
May 15, 2025Incorporating an autonomous auxiliary camera into robot-assisted minimally invasive surgery (RAMIS) enhances spatial awareness and eliminates manual viewpoint control. Existing path planning methods for auxiliary cameras track two-dimensional surgical features but do not simultaneously account for camera orientation, workspace constraints, and robot joint limits. This study presents AutoCam: an automatic auxiliary camera placement method to improve visualization in RAMIS. Implemented on the da Vinci Research Kit, the system uses a priority-based, workspace-constrained control algorithm that combines heuristic geometric placement with nonlinear optimization to ensure robust camera tracking. A user study (N=6) demonstrated that the system maintained 99.84% visibility of a salient feature and achieved a pose error of 4.36 $\pm$ 2.11 degrees and 1.95 $\pm$ 5.66 mm. The controller was computationally efficient, with a loop time of 6.8 $\pm$ 12.8 ms. An additional pilot study (N=6), where novices completed a Fundamentals of Laparoscopic Surgery training task, suggests that users can teleoperate just as effectively from AutoCam's viewpoint as from the endoscope's while still benefiting from AutoCam's improved visual coverage of the scene. These results indicate that an auxiliary camera can be autonomously controlled using the da Vinci patient-side manipulators to track a salient feature, laying the groundwork for new multi-camera visualization methods in RAMIS.
Force-Aware Autonomous Robotic Surgery
Jan 20, 2025This work demonstrates the benefits of using tool-tissue interaction forces in the design of autonomous systems in robot-assisted surgery (RAS). Autonomous systems in surgery must manipulate tissues of different stiffness levels and hence should apply different levels of forces accordingly. We hypothesize that this ability is enabled by using force measurements as input to policies learned from human demonstrations. To test this hypothesis, we use Action-Chunking Transformers (ACT) to train two policies through imitation learning for automated tissue retraction with the da Vinci Research Kit (dVRK). To quantify the effects of using tool-tissue interaction force data, we trained a "no force policy" that uses the vision and robot kinematic data, and compared it to a "force policy" that uses force, vision and robot kinematic data. When tested on a previously seen tissue sample, the force policy is 3 times more successful in autonomously performing the task compared with the no force policy. In addition, the force policy is more gentle with the tissue compared with the no force policy, exerting on average 62% less force on the tissue. When tested on a previously unseen tissue sample, the force policy is 3.5 times more successful in autonomously performing the task, exerting an order of magnitude less forces on the tissue, compared with the no force policy. These results open the door to design force-aware autonomous systems that can meet the surgical guidelines for tissue handling, especially using the newly released RAS systems with force feedback capabilities such as the da Vinci 5.
The Quiet Eye Phenomenon in Minimally Invasive Surgery
Sep 06, 2023In this paper, we report our discovery of a gaze behavior called Quiet Eye (QE) in minimally invasive surgery. The QE behavior has been extensively studied in sports training and has been associated with higher level of expertise in multiple sports. We investigated the QE behavior in two independently collected data sets of surgeons performing tasks in a sinus surgery setting and a robotic surgery setting, respectively. Our results show that the QE behavior is more likely to occur in successful task executions and in performances of surgeons of high level of expertise. These results open the door to use the QE behavior in both training and skill assessment in minimally invasive surgery.
Orientation Matters: 6-DoF Autonomous Camera Movement for Minimally Invasive Surgery
Dec 04, 2020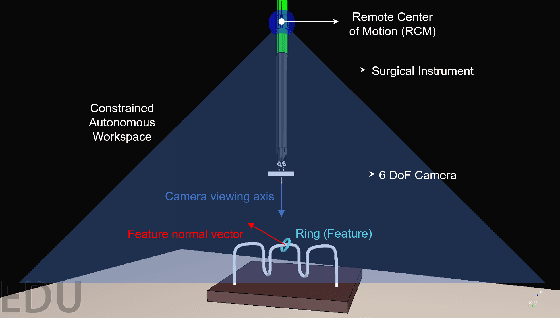
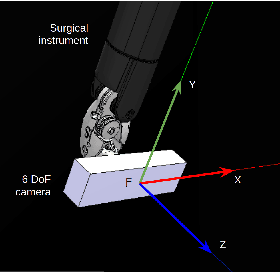
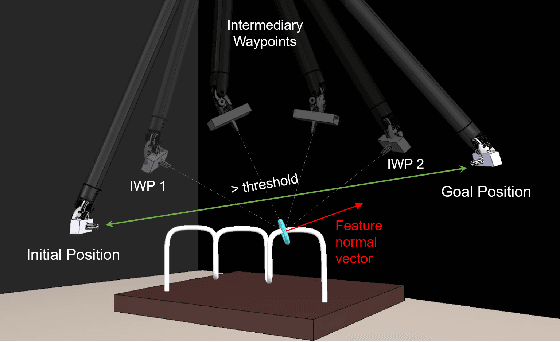
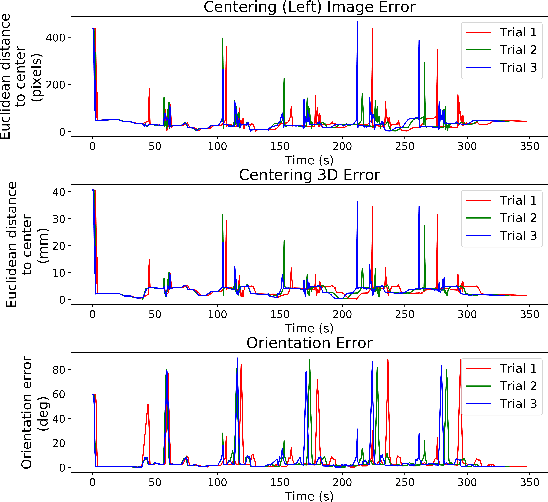
We propose a new method for six-degree-of-freedom (6-DoF) autonomous camera movement for minimally invasive surgery, which, unlike previous methods, takes into account both the position and orientation information from structures in the surgical scene. In addition to locating the camera for a good view of the manipulated object, our autonomous camera takes into account workspace constraints, including the horizon and safety constraints. We developed a simulation environment to test our method on the "wire chaser" surgical training task from validated training curricula in conventional laparoscopy and robot-assisted surgery. Furthermore, we propose, for the first time, the application of the proposed autonomous camera method in video-based surgical skill assessment, an area where videos are typically recorded using fixed cameras. In a study with N=30 human subjects, we show that video examination of the autonomous camera view as it tracks the ring motion over the wire leads to more accurate user error (ring touching the wire) detection than when using a fixed camera view, or camera movement with a fixed orientation. Our preliminary work suggests that there are potential benefits to autonomous camera positioning informed by scene orientation, and this can direct designers of automated endoscopes and surgical robotic systems, especially when using chip-on-tip cameras that can be wristed for 6-DoF motion.