 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeCould AI Leapfrog the Web? Evidence from Teachers in Sierra Leone
Feb 18, 2025



Access to digital information is a driver of economic development. But although 85% of sub-Saharan Africa's population is covered by mobile broadband signal, only 37% use the internet, and those who do seldom use the web. We investigate whether AI can bridge this gap by analyzing how 469 teachers use an AI chatbot in Sierra Leone. The chatbot, accessible via a common messaging app, is compared against traditional web search. Teachers use AI more frequently than web search for teaching assistance. Data cost is the most frequently cited reason for low internet usage across Africa. The average web search result consumes 3,107 times more data than an AI response, making AI 87% less expensive than web search. Additionally, only 2% of results for corresponding web searches contain content from Sierra Leone. In blinded evaluations, an independent sample of teachers rate AI responses as more relevant, helpful, and correct than web search results. These findings suggest that AI-driven solutions can cost-effectively bridge information gaps in low-connectivity regions.
Orientation Matters: 6-DoF Autonomous Camera Movement for Minimally Invasive Surgery
Dec 04, 2020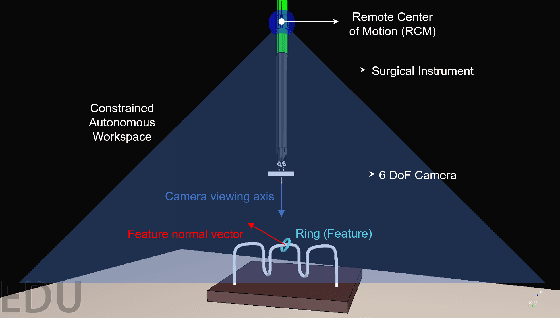
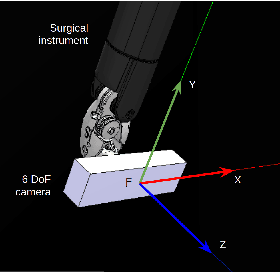
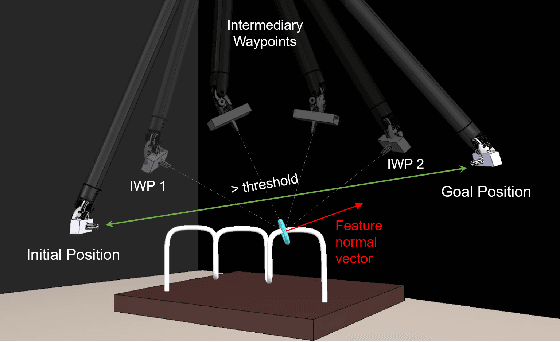
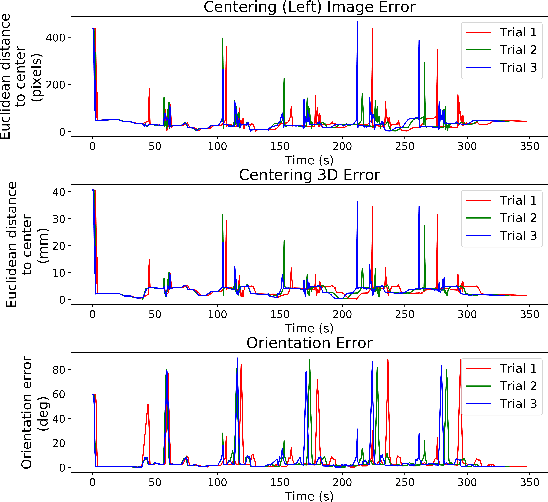
We propose a new method for six-degree-of-freedom (6-DoF) autonomous camera movement for minimally invasive surgery, which, unlike previous methods, takes into account both the position and orientation information from structures in the surgical scene. In addition to locating the camera for a good view of the manipulated object, our autonomous camera takes into account workspace constraints, including the horizon and safety constraints. We developed a simulation environment to test our method on the "wire chaser" surgical training task from validated training curricula in conventional laparoscopy and robot-assisted surgery. Furthermore, we propose, for the first time, the application of the proposed autonomous camera method in video-based surgical skill assessment, an area where videos are typically recorded using fixed cameras. In a study with N=30 human subjects, we show that video examination of the autonomous camera view as it tracks the ring motion over the wire leads to more accurate user error (ring touching the wire) detection than when using a fixed camera view, or camera movement with a fixed orientation. Our preliminary work suggests that there are potential benefits to autonomous camera positioning informed by scene orientation, and this can direct designers of automated endoscopes and surgical robotic systems, especially when using chip-on-tip cameras that can be wristed for 6-DoF motion.