 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeFlying Vines: Design, Modeling, and Control of a Soft Aerial Robotic Arm
Mar 26, 2025



Aerial robotic arms aim to enable inspection and environment interaction in otherwise hard-to-reach areas from the air. However, many aerial manipulators feature bulky or heavy robot manipulators mounted to large, high-payload aerial vehicles. Instead, we propose an aerial robotic arm with low mass and a small stowed configuration called a "flying vine". The flying vine consists of a small, maneuverable quadrotor equipped with a soft, growing, inflated beam as the arm. This soft robot arm is underactuated, and positioning of the end effector is achieved by controlling the coupled quadrotor-vine dynamics. In this work, we present the flying vine design and a modeling and control framework for tracking desired end effector trajectories. The dynamic model leverages data-driven modeling methods and introduces bilinear interpolation to account for time-varying dynamic parameters. We use trajectory optimization to plan quadrotor controls that produce desired end effector motions. Experimental results on a physical prototype demonstrate that our framework enables the flying vine to perform high-speed end effector tracking, laying a foundation for performing dynamic maneuvers with soft aerial manipulators.
phloSAR: a Portable, High-Flow Pressure Supply and Regulator Enabling Untethered Operation of Large Pneumatic Soft Robots
Mar 02, 2024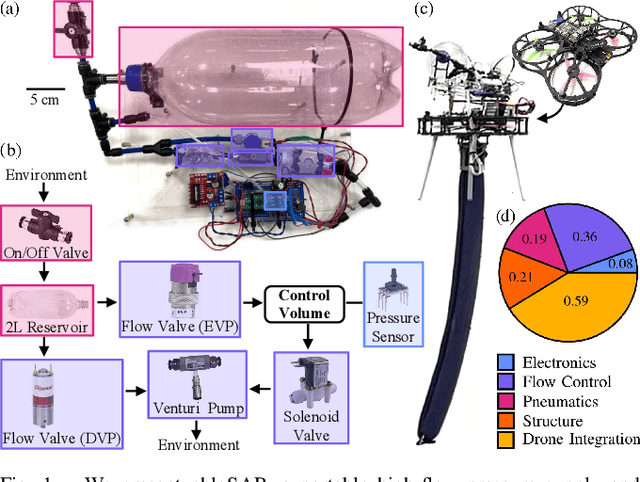
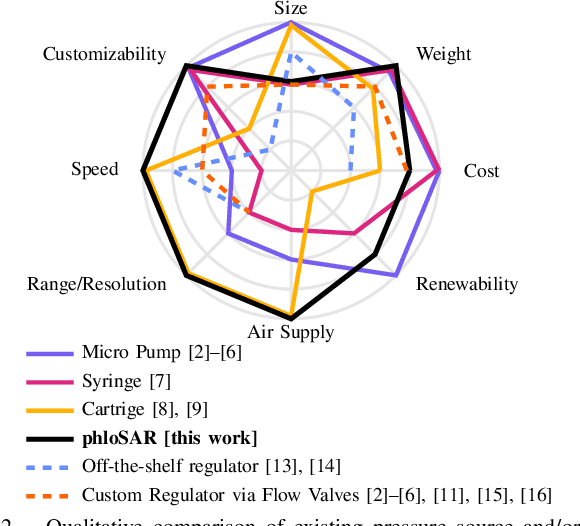
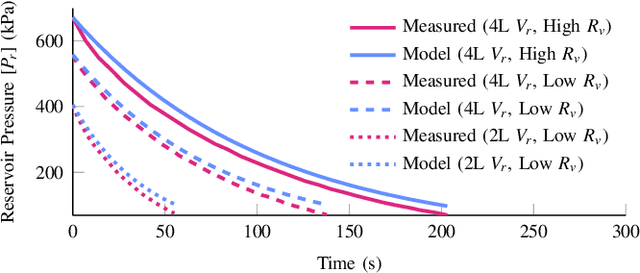
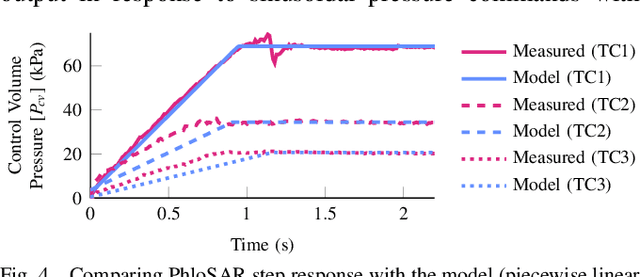
Pneumatic actuation benefits soft robotics by facilitating compliance, enabling large volume change, and concentrating actuator weight away from the end-effector. However, portability is compromised when pneumatic actuators are tethered to cumbersome air and power supplies. While there are existing options for portable pneumatic systems, they are limited in dynamic capabilities, constraining their applicability to low pressure and/or small-volume soft robots. In this work, we propose a portable, high-flow pressure supply and regulator (phloSAR) for use in untethered, weight-constrained, dynamic soft robot applications. PhloSAR leverages high-flow proportional valves, an integrated pressure reservoir, and Venturi vacuum generation to achieve portability and dynamic performance. We present a set of models that describe the system dynamics, experimentally validate them on physical hardware, and discuss the influence of design parameters on system operation. Lastly, we integrate a proof-of-concept prototype with a soft robot arm mounted on an aerial vehicle to demonstrate the system's applicability to mobile robotics. Our system enables new opportunities in mobile soft robotics by making untethered pneumatic supply and regulation available to a wider range of soft robots.
Passive Shape Locking for Multi-Bend Growing Inflated Beam Robots
Mar 04, 2023
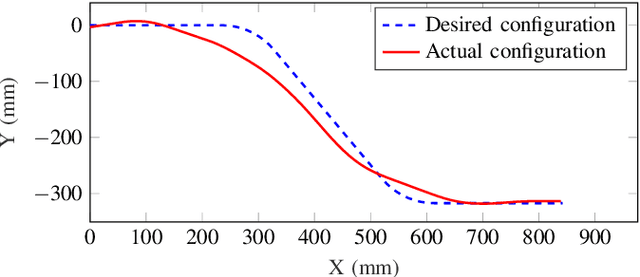
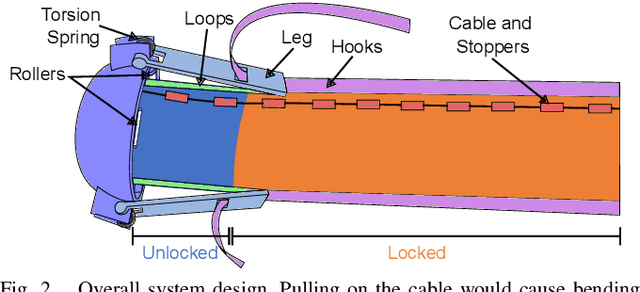
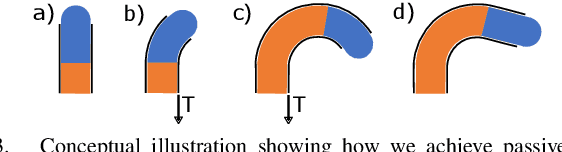
Shape change enables new capabilities for robots. One class of robots capable of dramatic shape change is soft growing "vine" robots. These robots usually feature global actuation methods for bending that limit them to simple, constant-curvature shapes. Achieving more complex "multi-bend" configurations has also been explored but requires choosing the desired configuration ahead of time, exploiting contact with the environment to maintain previous bends, or using pneumatic actuation for shape locking. In this paper, we present a novel design that enables passive, on-demand shape locking. Our design leverages a passive tip mount to apply hook-and-loop fasteners that hold bends without any pneumatic or electrical input. We characterize the robot's kinematics and ability to hold locked bends. We also experimentally evaluate the effect of hook-and-loop fasteners on beam and joint stiffness. Finally, we demonstrate our proof-of-concept prototype in 2D. Our passive shape locking design is a step towards easily reconfigurable robots that are lightweight, low-cost, and low-power.
Hybrid Learning- and Model-Based Planning and Control of In-Hand Manipulation
Sep 20, 2022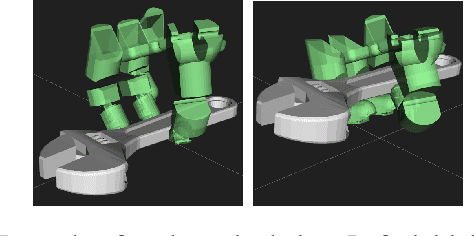
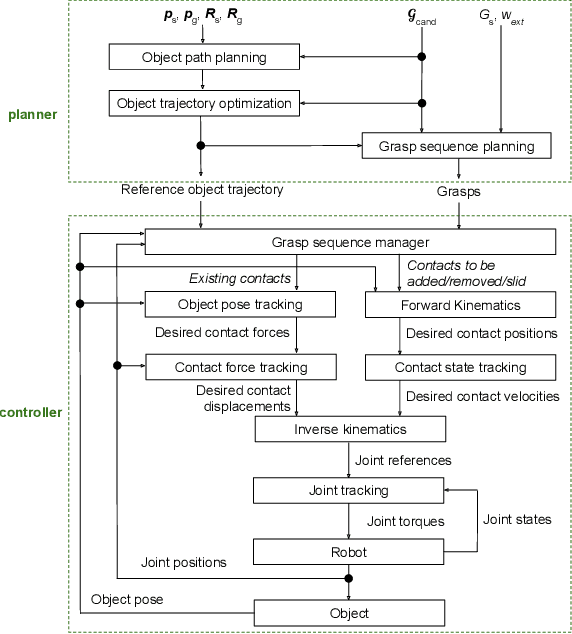
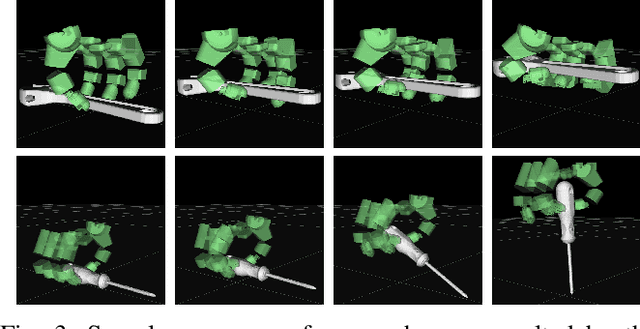
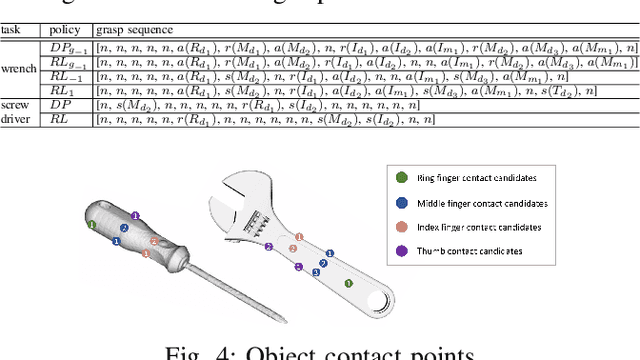
This paper presents a hierarchical framework for planning and control of in-hand manipulation of a rigid object involving grasp changes using fully-actuated multifingered robotic hands. While the framework can be applied to the general dexterous manipulation, we focus on a more complex definition of in-hand manipulation, where at the goal pose the hand has to reach a grasp suitable for using the object as a tool. The high level planner determines the object trajectory as well as the grasp changes, i.e. adding, removing, or sliding fingers, to be executed by the low-level controller. While the grasp sequence is planned online by a learning-based policy to adapt to variations, the trajectory planner and the low-level controller for object tracking and contact force control are exclusively model-based to robustly realize the plan. By infusing the knowledge about the physics of the problem and the low-level controller into the grasp planner, it learns to successfully generate grasps similar to those generated by model-based optimization approaches, obviating the high computation cost of online running of such methods to account for variations. By performing experiments in physics simulation for realistic tool use scenarios, we show the success of our method on different tool-use tasks and dexterous hand models. Additionally, we show that this hybrid method offers more robustness to trajectory and task variations compared to a model-based method.
A Dynamics Simulator for Soft Growing Robots
Nov 03, 2020
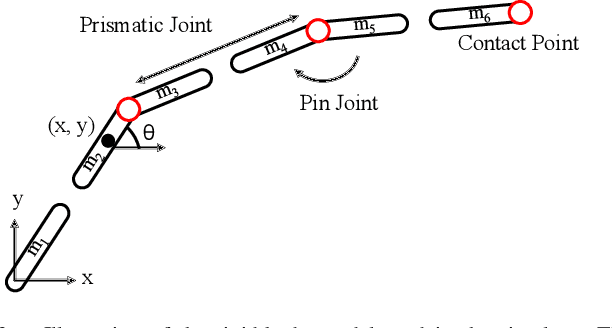
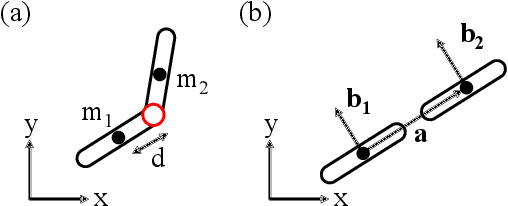
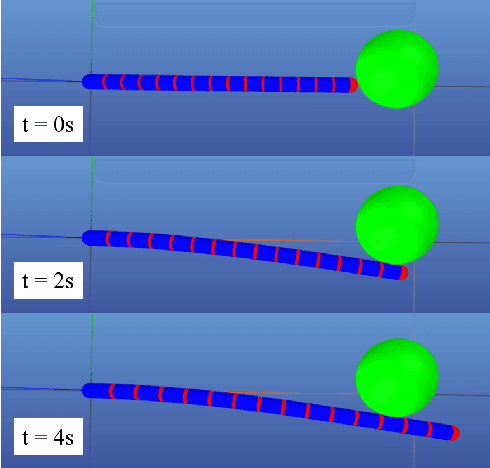
Simulating soft robots in cluttered environments remains an open problem due to the challenge of capturing complex dynamics and interactions with the environment. Furthermore, fast simulation is desired for quickly exploring robot behaviors in the context of motion planning. In this paper, we examine a particular class of inflated-beam soft growing robots called "vine robots", and present a dynamics simulator that captures general behaviors, handles robot-object interactions, and runs faster than real time. The simulator framework uses a simplified multi-link, rigid-body model with contact constraints. To narrow the sim-to-real gap, we develop methods for fitting model parameters based on video data of a robot in motion and in contact with an environment. We provide examples of simulations, including several with fit parameters, to show the qualitative and quantitative agreement between simulated and real behaviors. Our work demonstrates the capabilities of this high-speed dynamics simulator and its potential for use in the control of soft robots.