 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeIn-the-Wild Compliant Manipulation with UMI-FT
Jan 15, 2026Many manipulation tasks require careful force modulation. With insufficient force the task may fail, while excessive force could cause damage. The high cost, bulky size and fragility of commercial force/torque (F/T) sensors have limited large-scale, force-aware policy learning. We introduce UMI-FT, a handheld data-collection platform that mounts compact, six-axis force/torque sensors on each finger, enabling finger-level wrench measurements alongside RGB, depth, and pose. Using the multimodal data collected from this device, we train an adaptive compliance policy that predicts position targets, grasp force, and stiffness for execution on standard compliance controllers. In evaluations on three contact-rich, force-sensitive tasks (whiteboard wiping, skewering zucchini, and lightbulb insertion), UMI-FT enables policies that reliably regulate external contact forces and internal grasp forces, outperforming baselines that lack compliance or force sensing. UMI-FT offers a scalable path to learning compliant manipulation from in-the-wild demonstrations. We open-source the hardware and software to facilitate broader adoption at:https://umi-ft.github.io/.
SLAP: Slapband-based Autonomous Perching Drone with Failure Recovery for Vertical Tree Trunks
Jan 01, 2026Perching allows unmanned aerial vehicles (UAVs) to reduce energy consumption, remain anchored for surface sampling operations, or stably survey their surroundings. Previous efforts for perching on vertical surfaces have predominantly focused on lightweight mechanical design solutions with relatively scant system-level integration. Furthermore, perching strategies for vertical surfaces commonly require high-speed, aggressive landing operations that are dangerous for a surveyor drone with sensitive electronics onboard. This work presents the preliminary investigation of a perching approach suitable for larger drones that both gently perches on vertical tree trunks and reacts and recovers from perch failures. The system in this work, called SLAP, consists of vision-based perch site detector, an IMU (inertial-measurement-unit)-based perch failure detector, an attitude controller for soft perching, an optical close-range detection system, and a fast active elastic gripper with microspines made from commercially-available slapbands. We validated this approach on a modified 1.2 kg commercial quadrotor with component and system analysis. Initial human-in-the-loop autonomous indoor flight experiments achieved a 75% perch success rate on a real oak tree segment across 20 flights, and 100% perch failure recovery across 2 flights with induced failures.
Multimodal Sensing for Robot-Assisted Sub-Tissue Feature Detection in Physiotherapy Palpation
Dec 24, 2025Robotic palpation relies on force sensing, but force signals in soft-tissue environments are variable and cannot reliably reveal subtle subsurface features. We present a compact multimodal sensor that integrates high-resolution vision-based tactile imaging with a 6-axis force-torque sensor. In experiments on silicone phantoms with diverse subsurface tendon geometries, force signals alone frequently produce ambiguous responses, while tactile images reveal clear structural differences in presence, diameter, depth, crossings, and multiplicity. Yet accurate force tracking remains essential for maintaining safe, consistent contact during physiotherapeutic interaction. Preliminary results show that combining tactile and force modalities enables robust subsurface feature detection and controlled robotic palpation.
CoinFT: A Coin-Sized, Capacitive 6-Axis Force Torque Sensor for Robotic Applications
Mar 25, 2025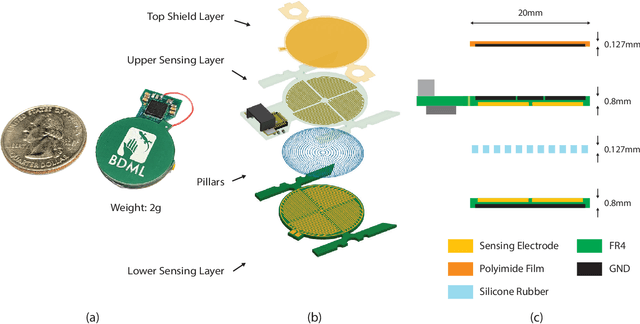
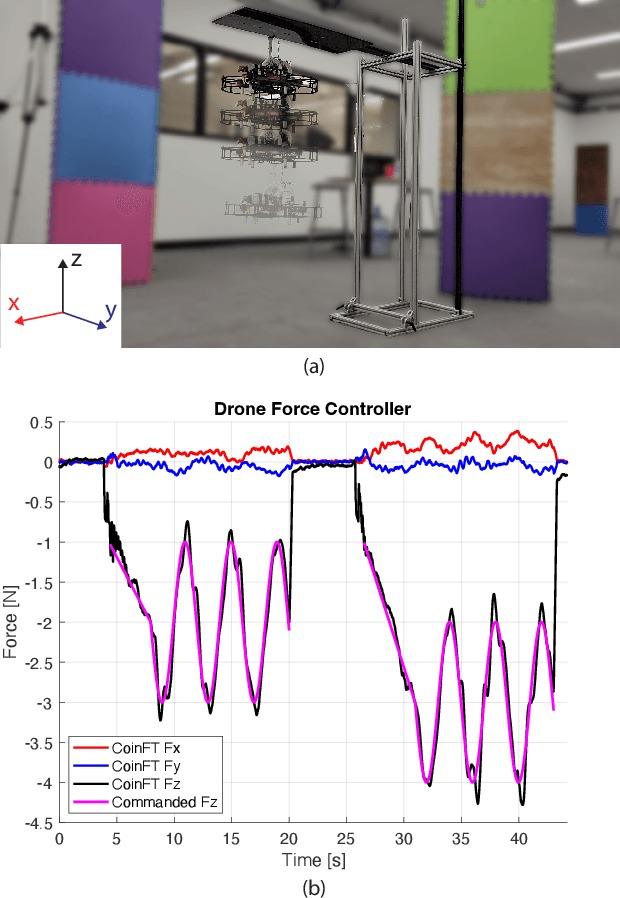
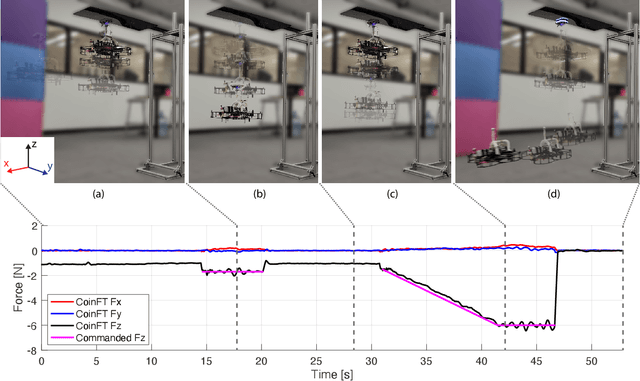
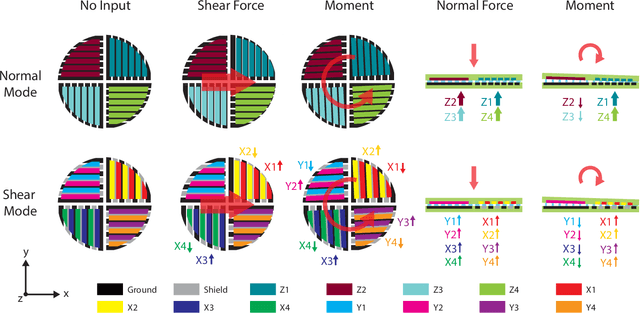
We introduce CoinFT, a capacitive 6-axis force/torque (F/T) sensor that is compact, light, low-cost, and robust with an average mean-squared error of 0.11N for force and 0.84mNm for moment when the input ranges from 0~10N and 0~4N in normal and shear directions, respectively. CoinFT is a stack of two rigid PCBs with comb-shaped electrodes connected by an array of silicone rubber pillars. The microcontroller interrogates the electrodes in different subsets in order to enhance sensitivity for measuring 6-axis F/T. The combination of desirable features of CoinFT enables various contact-rich robot interactions at a scale, across different embodiment domains including drones, robot end-effectors, and wearable haptic devices. We demonstrate the utility of CoinFT on drones by performing an attitude-based force control to perform tasks that require careful contact force modulation. The design, fabrication, and firmware of CoinFT are open-sourced at https://hojung-choi.github.io/coinft.github.io/.
TacCap: A Wearable FBG-Based Tactile Sensor for Seamless Human-to-Robot Skill Transfer
Mar 03, 2025Tactile sensing is essential for dexterous manipulation, yet large-scale human demonstration datasets lack tactile feedback, limiting their effectiveness in skill transfer to robots. To address this, we introduce TacCap, a wearable Fiber Bragg Grating (FBG)-based tactile sensor designed for seamless human-to-robot transfer. TacCap is lightweight, durable, and immune to electromagnetic interference, making it ideal for real-world data collection. We detail its design and fabrication, evaluate its sensitivity, repeatability, and cross-sensor consistency, and assess its effectiveness through grasp stability prediction and ablation studies. Our results demonstrate that TacCap enables transferable tactile data collection, bridging the gap between human demonstrations and robotic execution. To support further research and development, we open-source our hardware design and software.
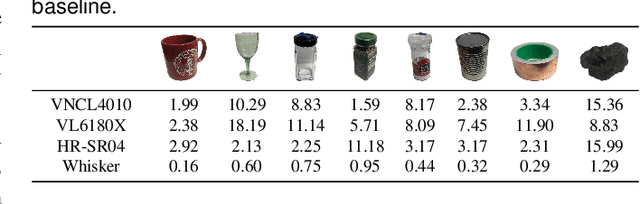
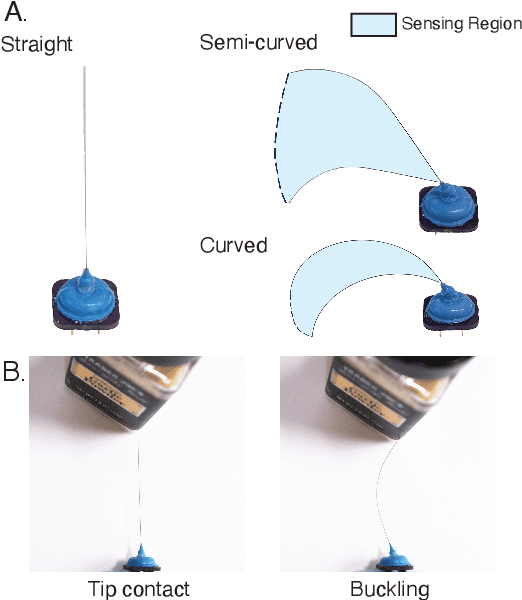
Whisker-Inspired Tactile Sensing: A Sim2Real Approach for Precise Underwater Contact Tracking
Oct 17, 2024



Aquatic mammals, such as pinnipeds, utilize their whiskers to detect and discriminate objects and analyze water movements, inspiring the development of robotic whiskers for sensing contacts, surfaces, and water flows. We present the design and application of underwater whisker sensors based on Fiber Bragg Grating (FBG) technology. These passive whiskers are mounted along the robot$'$s exterior to sense its surroundings through light, non-intrusive contacts. For contact tracking, we employ a sim-to-real learning framework, which involves extensive data collection in simulation followed by a sim-to-real calibration process to transfer the model trained in simulation to the real world. Experiments with whiskers immersed in water indicate that our approach can track contact points with an accuracy of $<2$ mm, without requiring precise robot proprioception. We demonstrate that the approach also generalizes to unseen objects.
Locomotion as Manipulation with ReachBot
Jul 01, 2024Caves and lava tubes on the Moon and Mars are sites of geological and astrobiological interest but consist of terrain that is inaccessible with traditional robot locomotion. To support the exploration of these sites, we present ReachBot, a robot that uses extendable booms as appendages to manipulate itself with respect to irregular rock surfaces. The booms terminate in grippers equipped with microspines and provide ReachBot with a large workspace, allowing it to achieve force closure in enclosed spaces such as the walls of a lava tube. To propel ReachBot, we present a contact-before-motion planner for non-gaited legged locomotion that utilizes internal force control, similar to a multi-fingered hand, to keep its long, slender booms in tension. Motion planning also depends on finding and executing secure grips on rock features. We use a Monte Carlo simulation to inform gripper design and predict grasp strength and variability. Additionally, we use a two-step perception system to identify possible grasp locations. To validate our approach and mechanisms under realistic conditions, we deployed a single ReachBot arm and gripper in a lava tube in the Mojave Desert. The field test confirmed that ReachBot will find many targets for secure grasps with the proposed kinematic design.
Navigation and 3D Surface Reconstruction from Passive Whisker Sensing
Jun 10, 2024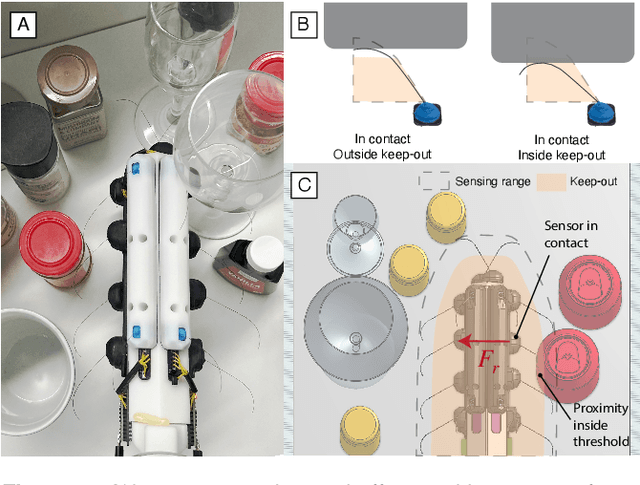
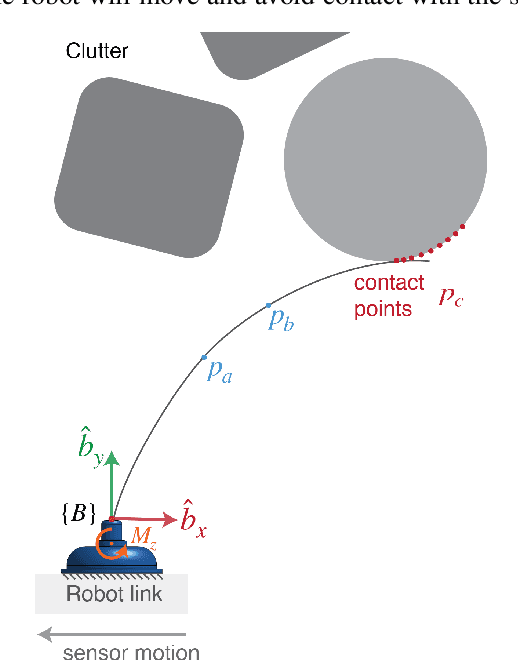
Whiskers provide a way to sense surfaces in the immediate environment without disturbing it. In this paper we present a method for using highly flexible, curved, passive whiskers mounted along a robot arm to gather sensory data as they brush past objects during normal robot motion. The information is useful both for guiding the robot in cluttered spaces and for reconstructing the exposed faces of objects. Surface reconstruction depends on accurate localization of contact points along each whisker. We present an algorithm based on Bayesian filtering that rapidly converges to within 1\,mm of the actual contact locations. The piecewise-continuous history of contact locations from each whisker allows for accurate reconstruction of curves on object surfaces. Employing multiple whiskers and traces, we are able to produce an occupancy map of proximal objects.
ReachBot Field Tests in a Mojave Desert Lava Tube as a Martian Analog
May 23, 2024



ReachBot is a robot concept for the planetary exploration of caves and lava tubes, which are often inaccessible with traditional robot locomotion methods. It uses extendable booms as appendages, with grippers mounted at the end, to grasp irregular rock surfaces and traverse these difficult terrains. We have built a partial ReachBot prototype consisting of a single boom and gripper, mounted on a tripod. We present the details on the design and field test of this partial ReachBot prototype in a lava tube in the Mojave Desert. The technical requirements of the field testing, implementation details, and grasp performance results are discussed. The planning and preparation of the field test and lessons learned are also given.
Using Fiber Optic Bundles to Miniaturize Vision-Based Tactile Sensors
Mar 12, 2024



Vision-based tactile sensors have recently become popular due to their combination of low cost, very high spatial resolution, and ease of integration using widely available miniature cameras. The associated field of view and focal length, however, are difficult to package in a human-sized finger. In this paper we employ optical fiber bundles to achieve a form factor that, at 15 mm diameter, is smaller than an average human fingertip. The electronics and camera are also located remotely, further reducing package size. The sensor achieves a spatial resolution of 0.22 mm and a minimum force resolution 5 mN for normal and shear contact forces. With these attributes, the DIGIT Pinki sensor is suitable for applications such as robotic and teleoperated digital palpation. We demonstrate its utility for palpation of the prostate gland and show that it can achieve clinically relevant discrimination of prostate stiffness for phantom and ex vivo tissue.