 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLocomotion as Manipulation with ReachBot
Jul 01, 2024Caves and lava tubes on the Moon and Mars are sites of geological and astrobiological interest but consist of terrain that is inaccessible with traditional robot locomotion. To support the exploration of these sites, we present ReachBot, a robot that uses extendable booms as appendages to manipulate itself with respect to irregular rock surfaces. The booms terminate in grippers equipped with microspines and provide ReachBot with a large workspace, allowing it to achieve force closure in enclosed spaces such as the walls of a lava tube. To propel ReachBot, we present a contact-before-motion planner for non-gaited legged locomotion that utilizes internal force control, similar to a multi-fingered hand, to keep its long, slender booms in tension. Motion planning also depends on finding and executing secure grips on rock features. We use a Monte Carlo simulation to inform gripper design and predict grasp strength and variability. Additionally, we use a two-step perception system to identify possible grasp locations. To validate our approach and mechanisms under realistic conditions, we deployed a single ReachBot arm and gripper in a lava tube in the Mojave Desert. The field test confirmed that ReachBot will find many targets for secure grasps with the proposed kinematic design.
Martian Exploration of Lava Tubes (MELT) with ReachBot: Scientific Investigation and Concept of Operations
Jun 19, 2024



As natural access points to the subsurface, lava tubes and other caves have become premier targets of planetary missions for astrobiological analyses. Few existing robotic paradigms, however, are able to explore such challenging environments. ReachBot is a robot that enables navigation in planetary caves by using extendable and retractable limbs to locomote. This paper outlines the potential science return and mission operations for a notional mission that deploys ReachBot to a martian lava tube. In this work, the motivating science goals and science traceability matrix are provided to guide payload selection. A Concept of Operations (ConOps) is also developed for ReachBot, providing a framework for deployment and activities on Mars, analyzing mission risks, and developing mitigation strategies
ReachBot Field Tests in a Mojave Desert Lava Tube as a Martian Analog
May 23, 2024



ReachBot is a robot concept for the planetary exploration of caves and lava tubes, which are often inaccessible with traditional robot locomotion methods. It uses extendable booms as appendages, with grippers mounted at the end, to grasp irregular rock surfaces and traverse these difficult terrains. We have built a partial ReachBot prototype consisting of a single boom and gripper, mounted on a tripod. We present the details on the design and field test of this partial ReachBot prototype in a lava tube in the Mojave Desert. The technical requirements of the field testing, implementation details, and grasp performance results are discussed. The planning and preparation of the field test and lessons learned are also given.
Motion Planning for a Climbing Robot with Stochastic Grasps
Sep 21, 2022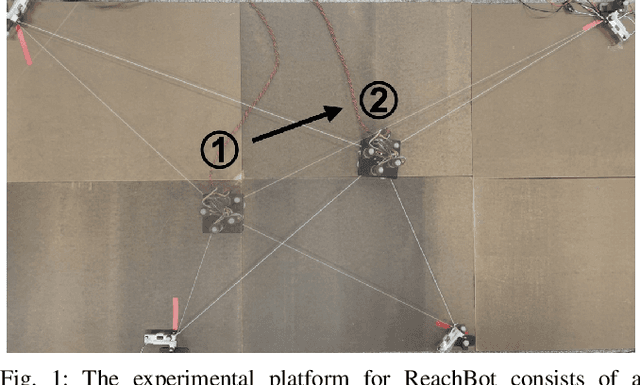
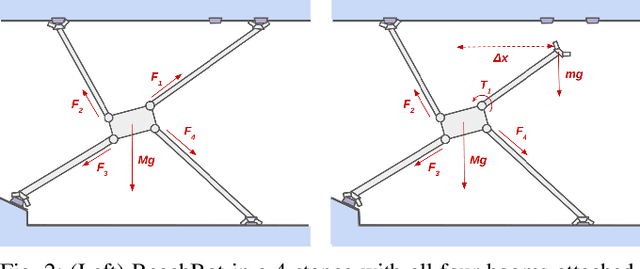

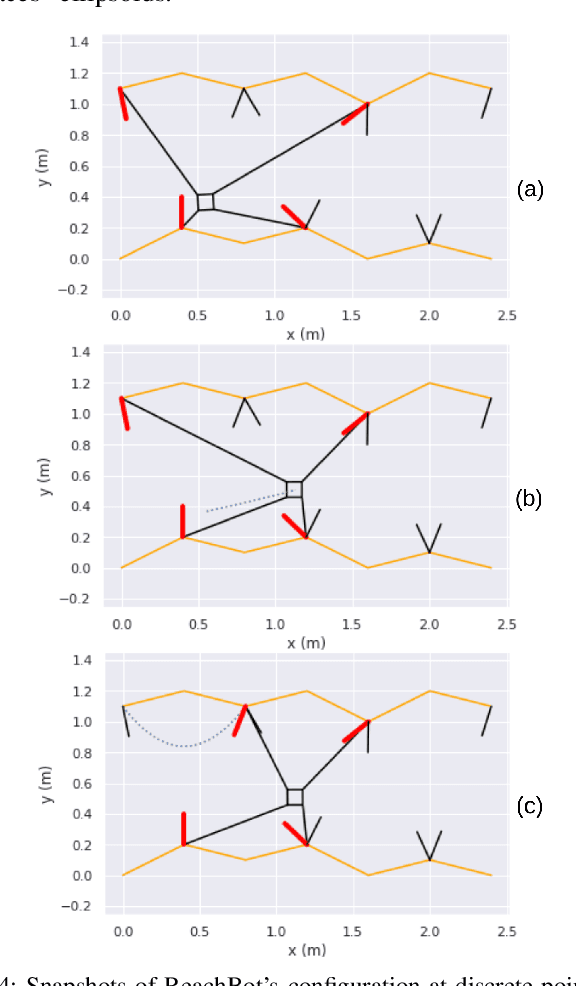
Motion planning for a multi-limbed climbing robot must consider the robot's posture, joint torques, and how it uses contact forces to interact with its environment. This paper focuses on motion planning for a robot that uses nontraditional locomotion to explore unpredictable environments such as martian caves. Our robotic concept, ReachBot, uses extendable and retractable booms as limbs to achieve a large reachable workspace while climbing. Each extendable boom is capped by a microspine gripper designed for grasping rocky surfaces. ReachBot leverages its large workspace to navigate around obstacles, over crevasses, and through challenging terrain. Our planning approach must be versatile to accommodate variable terrain features and robust to mitigate risks from the stochastic nature of grasping with spines. In this paper, we introduce a graph traversal algorithm to select a discrete sequence of grasps based on available terrain features suitable for grasping. This discrete plan is complemented by a decoupled motion planner that considers the alternating phases of body movement and end-effector movement, using a combination of sampling-based planning and sequential convex programming to optimize individual phases. We use our motion planner to plan a trajectory across a simulated 2D cave environment with at least 95% probability of success and demonstrate improved robustness over a baseline trajectory. Finally, we verify our motion planning algorithm through experimentation on a 2D planar prototype.