 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeGoing In Blind: Object Motion Classification using Distributed Tactile Sensing for Safe Reaching in Clutter
Sep 30, 2022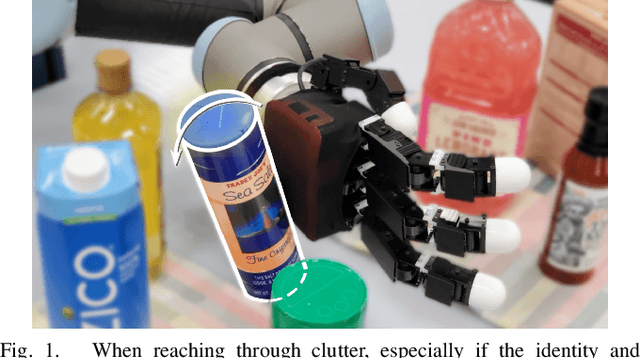
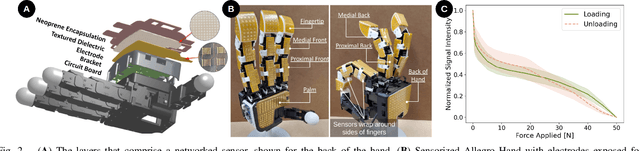
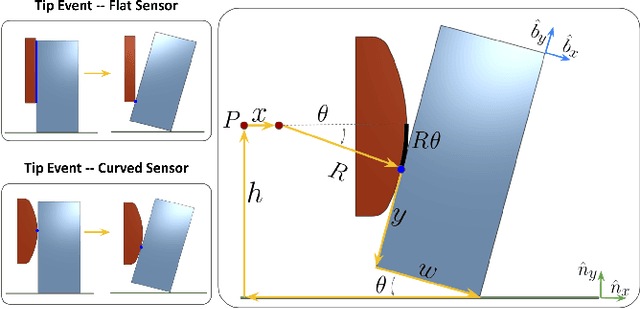
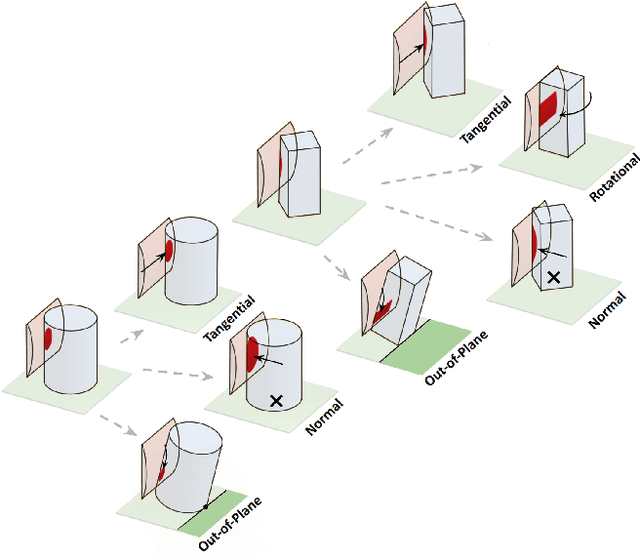
Robotic manipulators navigating cluttered shelves or cabinets may find it challenging to avoid contact with obstacles. Indeed, rearranging obstacles may be necessary to access a target. Rather than planning explicit motions that place obstacles into a desired pose, we suggest allowing incidental contacts to rearrange obstacles while monitoring contacts for safety. Bypassing object identification, we present a method for categorizing object motions from tactile data collected from incidental contacts with a capacitive tactile skin on an Allegro Hand. We formalize tactile cues associated with categories of object motion, demonstrating that they can determine with $>90$% accuracy whether an object is movable and whether a contact is causing the object to slide stably (safe contact) or tip (unsafe).
Quasi-Direct Drive for Low-Cost Compliant Robotic Manipulation
Apr 11, 2019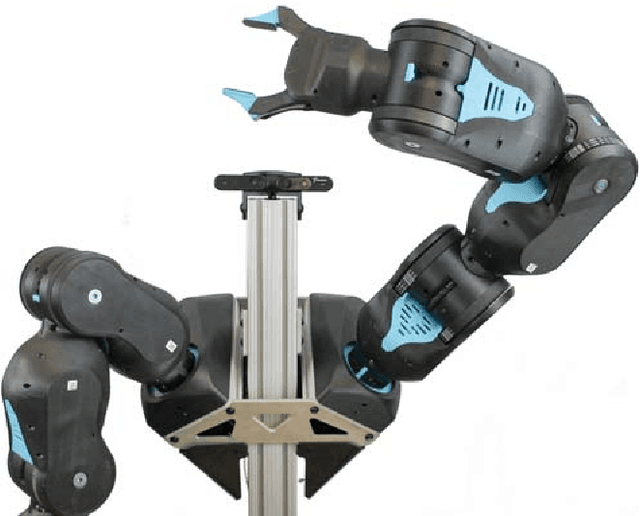
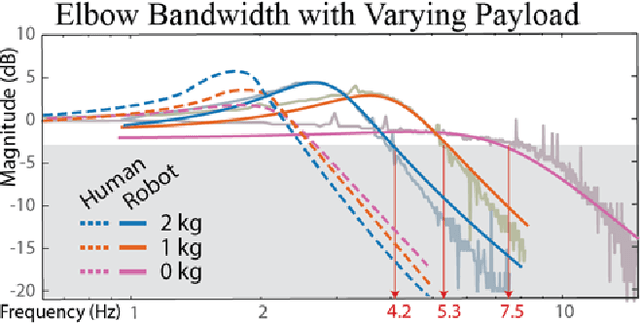

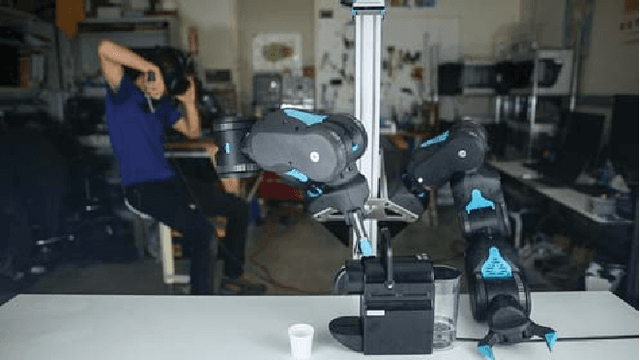
Robots must cost less and be force-controlled to enable widespread, safe deployment in unconstrained human environments. We propose Quasi-Direct Drive actuation as a capable paradigm for robotic force-controlled manipulation in human environments at low-cost. Our prototype - Blue - is a human scale 7 Degree of Freedom arm with 2kg payload. Blue can cost less than $5000. We show that Blue has dynamic properties that meet or exceed the needs of human operators: the robot has a nominal position-control bandwidth of 7.5Hz and repeatability within 4mm. We demonstrate a Virtual Reality based interface that can be used as a method for telepresence and collecting robot training demonstrations. Manufacturability, scaling, and potential use-cases for the Blue system are also addressed. Videos and additional information can be found online at berkeleyopenarms.github.io