 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeRoboCopilot: Human-in-the-loop Interactive Imitation Learning for Robot Manipulation
Mar 10, 2025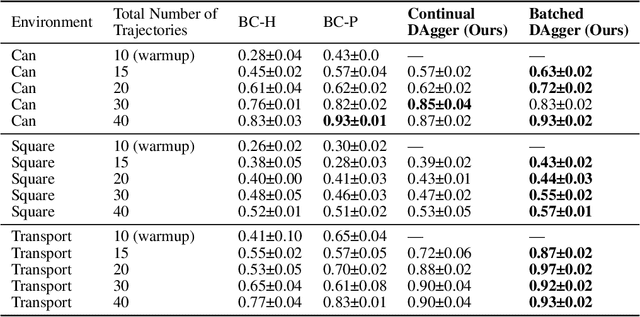
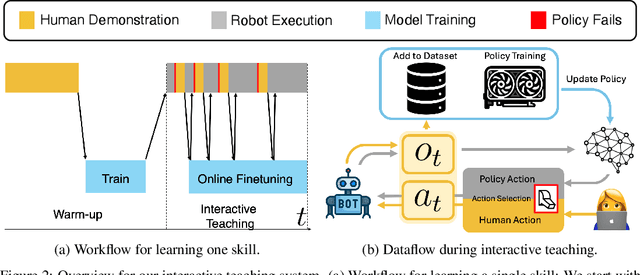
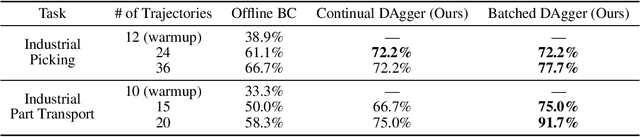
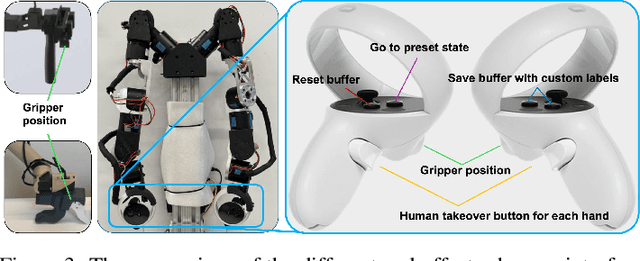
Learning from human demonstration is an effective approach for learning complex manipulation skills. However, existing approaches heavily focus on learning from passive human demonstration data for its simplicity in data collection. Interactive human teaching has appealing theoretical and practical properties, but they are not well supported by existing human-robot interfaces. This paper proposes a novel system that enables seamless control switching between human and an autonomous policy for bi-manual manipulation tasks, enabling more efficient learning of new tasks. This is achieved through a compliant, bilateral teleoperation system. Through simulation and hardware experiments, we demonstrate the value of our system in an interactive human teaching for learning complex bi-manual manipulation skills.
Design of a Multimodal Fingertip Sensor for Dynamic Manipulation
Sep 23, 2022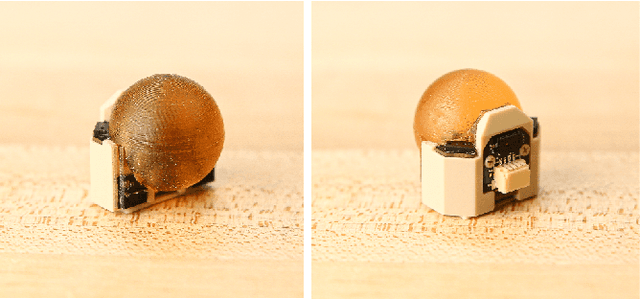
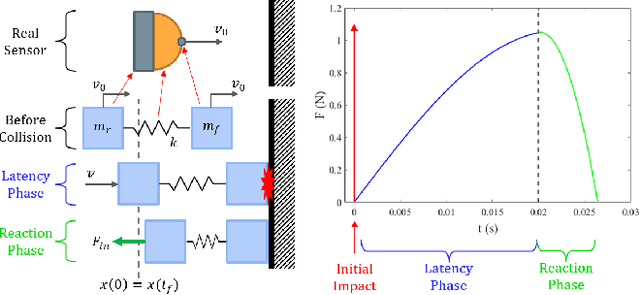
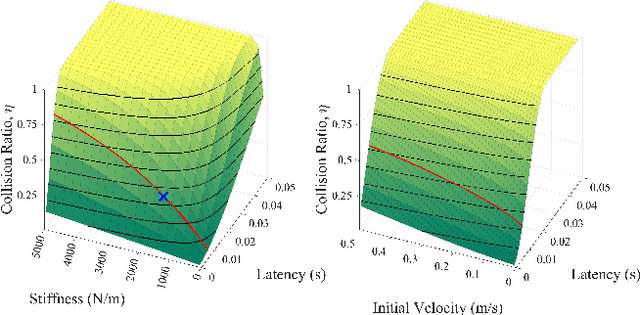
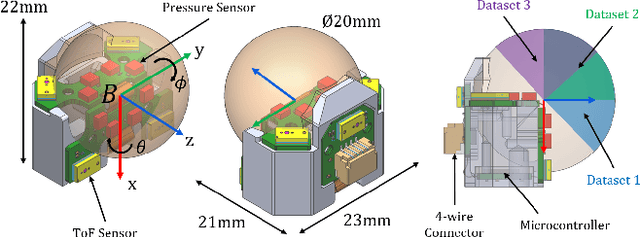
We introduce a spherical fingertip sensor for dynamic manipulation. It is based on barometric pressure and time-of-flight proximity sensors and is low-latency, compact, and physically robust. The sensor uses a trained neural network to estimate the contact location and three-axis contact forces based on data from the pressure sensors, which are embedded within the sensor's sphere of polyurethane rubber. The time-of-flight sensors face in three different outward directions, and an integrated microcontroller samples each of the individual sensors at up to 200 Hz. To quantify the effect of system latency on dynamic manipulation performance, we develop and analyze a metric called the collision impulse ratio and characterize the end-to-end latency of our new sensor. We also present experimental demonstrations with the sensor, including measuring contact transitions, performing coarse mapping, maintaining a contact force with a moving object, and reacting to avoid collisions.
Towards Robust Autonomous Grasping with Reflexes Using High-Bandwidth Sensing and Actuation
Sep 23, 2022
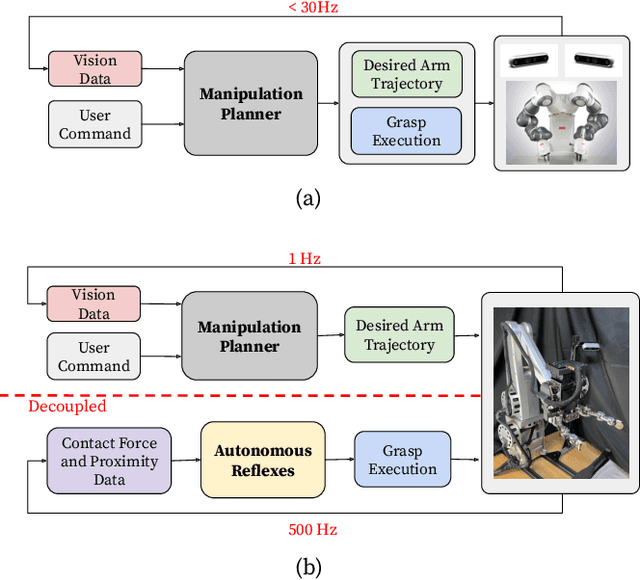
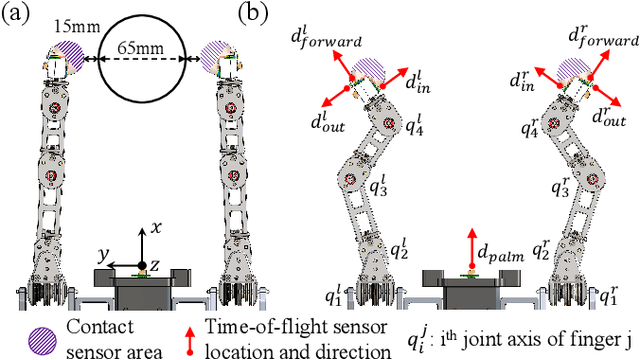
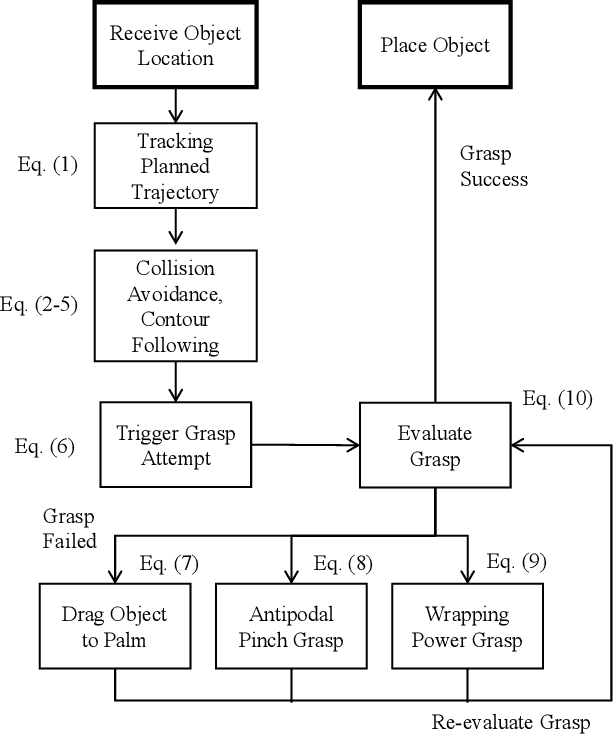
Modern robotic manipulation systems fall short of human manipulation skills partly because they rely on closing feedback loops exclusively around vision data, which reduces system bandwidth and speed. By developing autonomous grasping reflexes that rely on high-bandwidth force, contact, and proximity data, the overall system speed and robustness can be increased while reducing reliance on vision data. We are developing a new system built around a low-inertia, high-speed arm with nimble fingers that combines a high-level trajectory planner operating at less than 1 Hz with low-level autonomous reflex controllers running upwards of 300 Hz. We characterize the reflex system by comparing the volume of the set of successful grasps for a naive baseline controller and variations of our reflexive grasping controller, finding that our controller expands the set of successful grasps by 55% relative to the baseline. We also deploy our reflexive grasping controller with a simple vision-based planner in an autonomous clutter clearing task, achieving a grasp success rate above 90% while clearing over 100 items.
Quasi-Direct Drive for Low-Cost Compliant Robotic Manipulation
Apr 11, 2019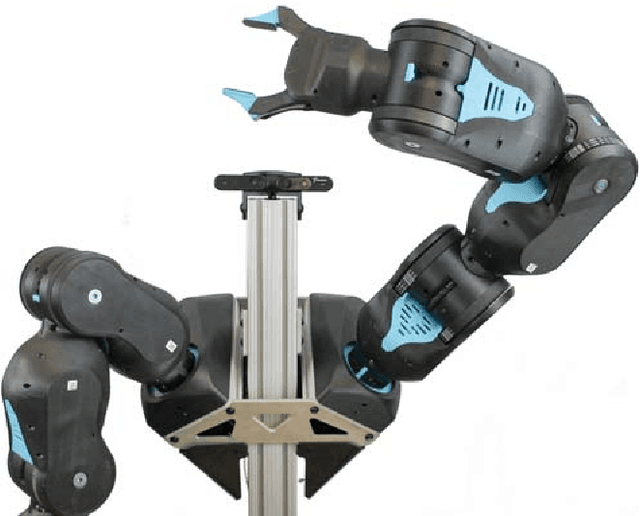
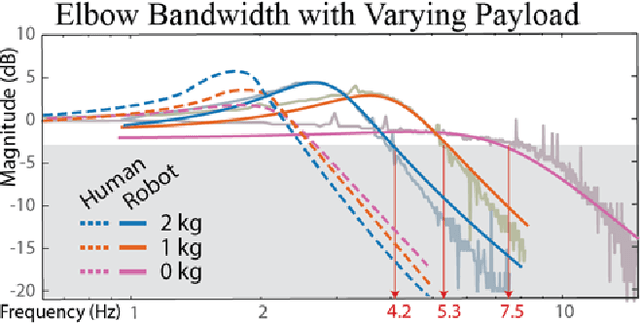

Robots must cost less and be force-controlled to enable widespread, safe deployment in unconstrained human environments. We propose Quasi-Direct Drive actuation as a capable paradigm for robotic force-controlled manipulation in human environments at low-cost. Our prototype - Blue - is a human scale 7 Degree of Freedom arm with 2kg payload. Blue can cost less than $5000. We show that Blue has dynamic properties that meet or exceed the needs of human operators: the robot has a nominal position-control bandwidth of 7.5Hz and repeatability within 4mm. We demonstrate a Virtual Reality based interface that can be used as a method for telepresence and collecting robot training demonstrations. Manufacturability, scaling, and potential use-cases for the Blue system are also addressed. Videos and additional information can be found online at berkeleyopenarms.github.io