 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeHow Can Large Language Models Help Humans in Design and Manufacturing?
Jul 25, 2023The advancement of Large Language Models (LLMs), including GPT-4, provides exciting new opportunities for generative design. We investigate the application of this tool across the entire design and manufacturing workflow. Specifically, we scrutinize the utility of LLMs in tasks such as: converting a text-based prompt into a design specification, transforming a design into manufacturing instructions, producing a design space and design variations, computing the performance of a design, and searching for designs predicated on performance. Through a series of examples, we highlight both the benefits and the limitations of the current LLMs. By exposing these limitations, we aspire to catalyze the continued improvement and progression of these models.
Multi-Objective Graph Heuristic Search for Terrestrial Robot Design
Jul 13, 2021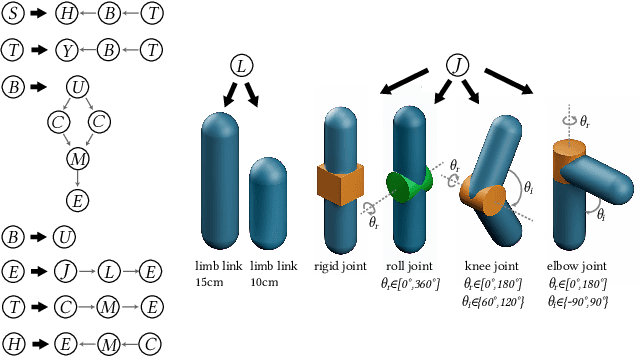
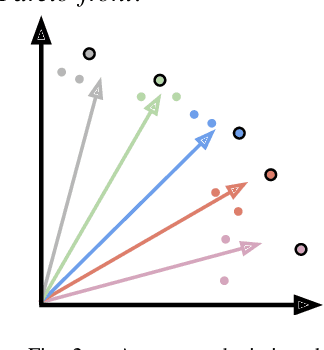
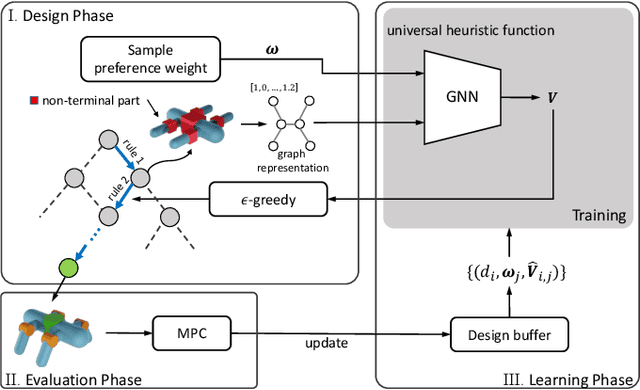
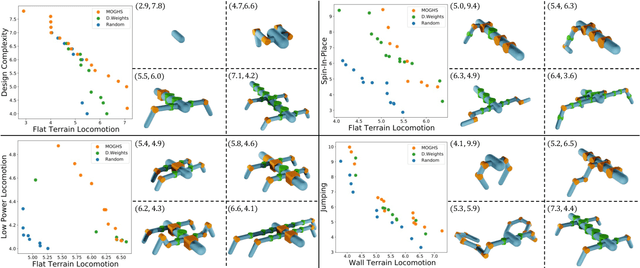
We present methods for co-designing rigid robots over control and morphology (including discrete topology) over multiple objectives. Previous work has addressed problems in single-objective robot co-design or multi-objective control. However, the joint multi-objective co-design problem is extremely important for generating capable, versatile, algorithmically designed robots. In this work, we present Multi-Objective Graph Heuristic Search, which extends a single-objective graph heuristic search from previous work to enable a highly efficient multi-objective search in a combinatorial design topology space. Core to this approach, we introduce a new universal, multi-objective heuristic function based on graph neural networks that is able to effectively leverage learned information between different task trade-offs. We demonstrate our approach on six combinations of seven terrestrial locomotion and design tasks, including one three-objective example. We compare the captured Pareto fronts across different methods and demonstrate that our multi-objective graph heuristic search quantitatively and qualitatively outperforms other techniques.
Quasi-Direct Drive for Low-Cost Compliant Robotic Manipulation
Apr 11, 2019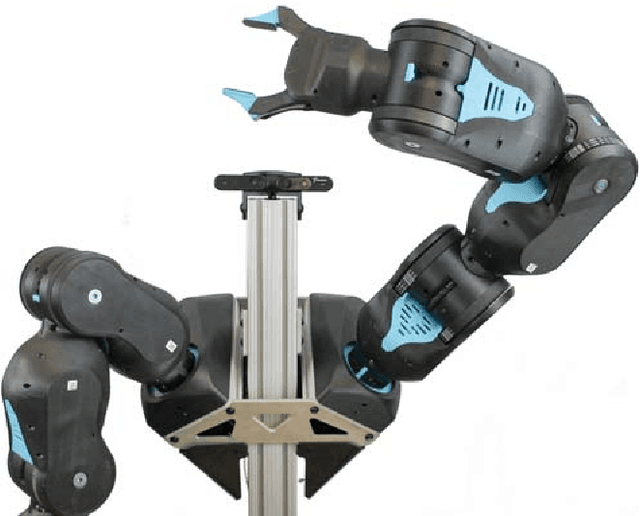
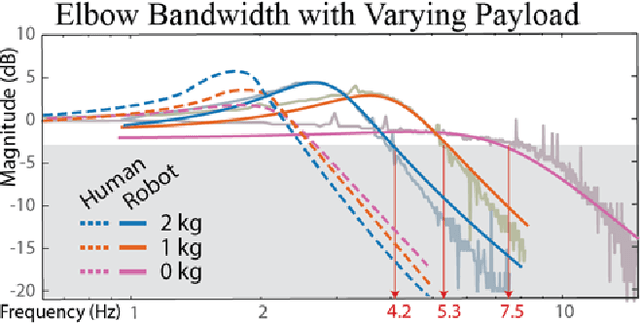

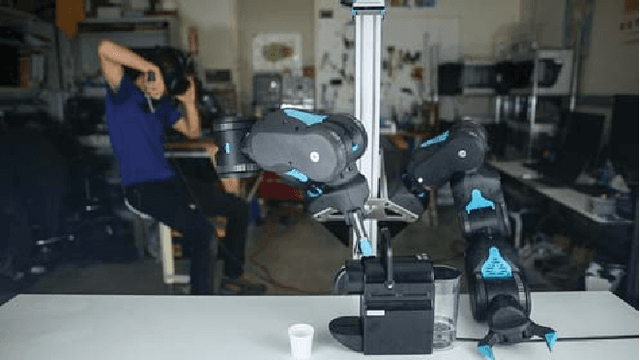
Robots must cost less and be force-controlled to enable widespread, safe deployment in unconstrained human environments. We propose Quasi-Direct Drive actuation as a capable paradigm for robotic force-controlled manipulation in human environments at low-cost. Our prototype - Blue - is a human scale 7 Degree of Freedom arm with 2kg payload. Blue can cost less than $5000. We show that Blue has dynamic properties that meet or exceed the needs of human operators: the robot has a nominal position-control bandwidth of 7.5Hz and repeatability within 4mm. We demonstrate a Virtual Reality based interface that can be used as a method for telepresence and collecting robot training demonstrations. Manufacturability, scaling, and potential use-cases for the Blue system are also addressed. Videos and additional information can be found online at berkeleyopenarms.github.io