 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeHow Can Large Language Models Help Humans in Design and Manufacturing?
Jul 25, 2023The advancement of Large Language Models (LLMs), including GPT-4, provides exciting new opportunities for generative design. We investigate the application of this tool across the entire design and manufacturing workflow. Specifically, we scrutinize the utility of LLMs in tasks such as: converting a text-based prompt into a design specification, transforming a design into manufacturing instructions, producing a design space and design variations, computing the performance of a design, and searching for designs predicated on performance. Through a series of examples, we highlight both the benefits and the limitations of the current LLMs. By exposing these limitations, we aspire to catalyze the continued improvement and progression of these models.
An Integrated Design Pipeline for Tactile Sensing Robotic Manipulators
Apr 14, 2022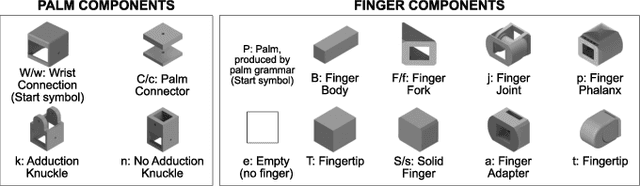
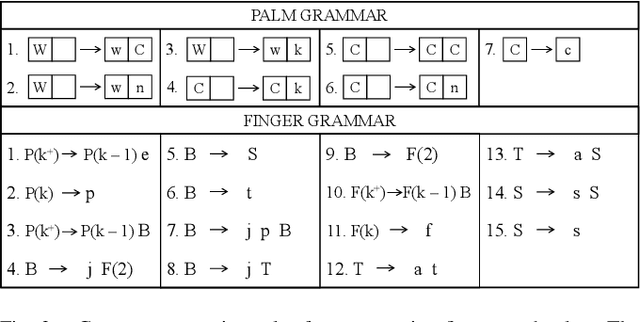
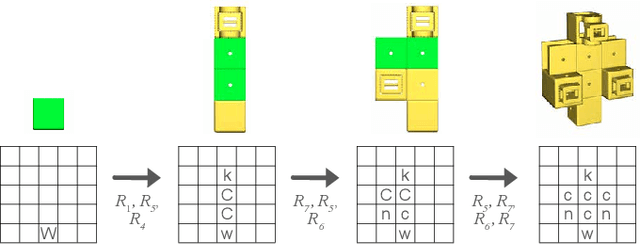
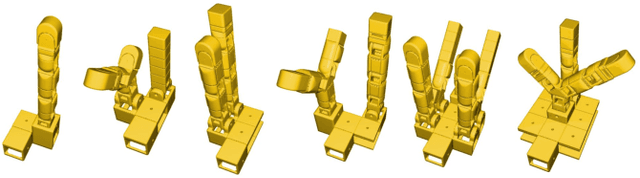
Traditional robotic manipulator design methods require extensive, time-consuming, and manual trial and error to produce a viable design. During this process, engineers often spend their time redesigning or reshaping components as they discover better topologies for the robotic manipulator. Tactile sensors, while useful, often complicate the design due to their bulky form factor. We propose an integrated design pipeline to streamline the design and manufacturing of robotic manipulators with knitted, glove-like tactile sensors. The proposed pipeline allows a designer to assemble a collection of modular, open-source components by applying predefined graph grammar rules. The end result is an intuitive design paradigm that allows the creation of new virtual designs of manipulators in a matter of minutes. Our framework allows the designer to fine-tune the manipulator's shape through cage-based geometry deformation. Finally, the designer can select surfaces for adding tactile sensing. Once the manipulator design is finished, the program will automatically generate 3D printing and knitting files for manufacturing. We demonstrate the utility of this pipeline by creating four custom manipulators tested on real-world tasks: screwing in a wing screw, sorting water bottles, picking up an egg, and cutting paper with scissors.
Dynamic Modeling of Hand-Object Interactions via Tactile Sensing
Sep 09, 2021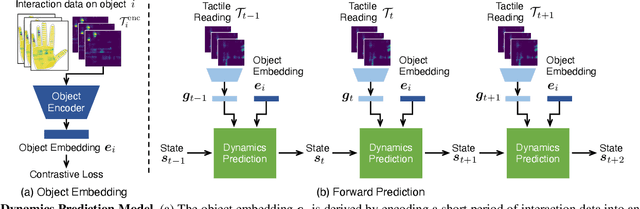
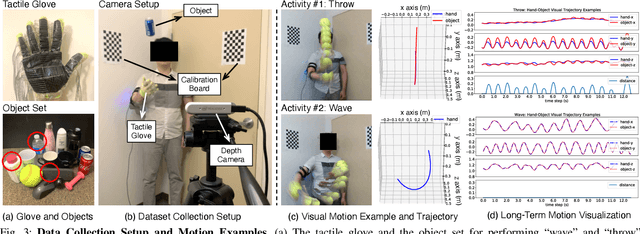
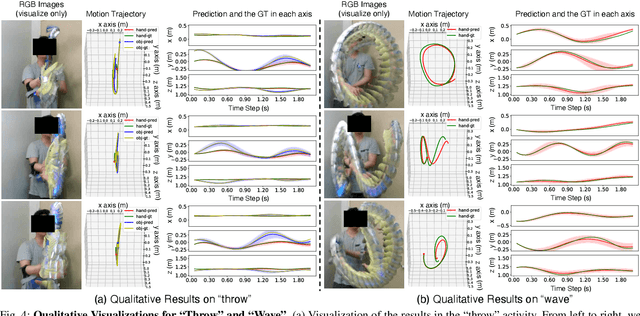
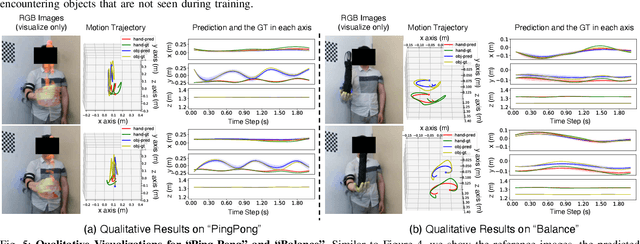
Tactile sensing is critical for humans to perform everyday tasks. While significant progress has been made in analyzing object grasping from vision, it remains unclear how we can utilize tactile sensing to reason about and model the dynamics of hand-object interactions. In this work, we employ a high-resolution tactile glove to perform four different interactive activities on a diversified set of objects. We build our model on a cross-modal learning framework and generate the labels using a visual processing pipeline to supervise the tactile model, which can then be used on its own during the test time. The tactile model aims to predict the 3d locations of both the hand and the object purely from the touch data by combining a predictive model and a contrastive learning module. This framework can reason about the interaction patterns from the tactile data, hallucinate the changes in the environment, estimate the uncertainty of the prediction, and generalize to unseen objects. We also provide detailed ablation studies regarding different system designs as well as visualizations of the predicted trajectories. This work takes a step on dynamics modeling in hand-object interactions from dense tactile sensing, which opens the door for future applications in activity learning, human-computer interactions, and imitation learning for robotics.
An End-to-End Differentiable Framework for Contact-Aware Robot Design
Jul 15, 2021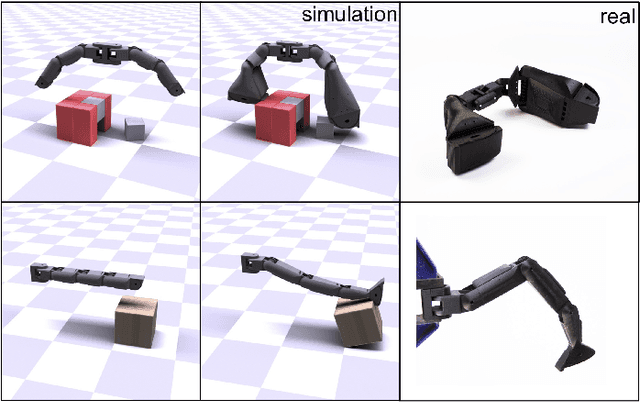
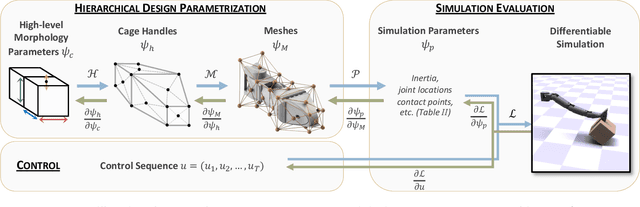

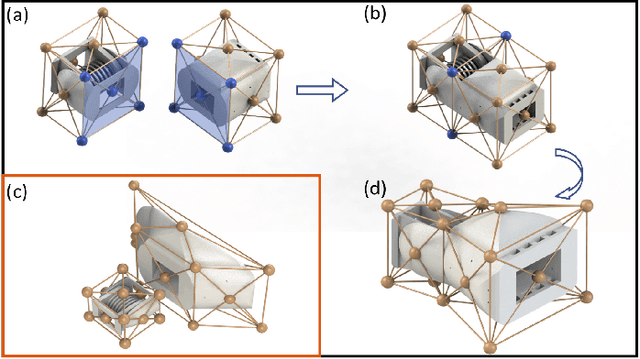
The current dominant paradigm for robotic manipulation involves two separate stages: manipulator design and control. Because the robot's morphology and how it can be controlled are intimately linked, joint optimization of design and control can significantly improve performance. Existing methods for co-optimization are limited and fail to explore a rich space of designs. The primary reason is the trade-off between the complexity of designs that is necessary for contact-rich tasks against the practical constraints of manufacturing, optimization, contact handling, etc. We overcome several of these challenges by building an end-to-end differentiable framework for contact-aware robot design. The two key components of this framework are: a novel deformation-based parameterization that allows for the design of articulated rigid robots with arbitrary, complex geometry, and a differentiable rigid body simulator that can handle contact-rich scenarios and computes analytical gradients for a full spectrum of kinematic and dynamic parameters. On multiple manipulation tasks, our framework outperforms existing methods that either only optimize for control or for design using alternate representations or co-optimize using gradient-free methods.
Polygrammar: Grammar for Digital Polymer Representation and Generation
May 05, 2021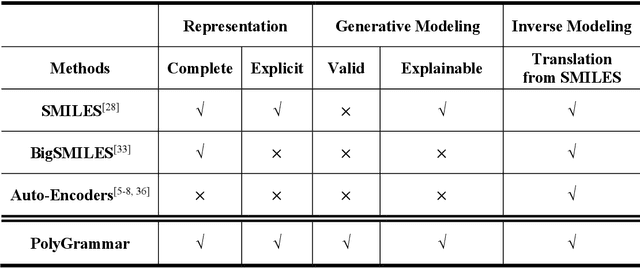
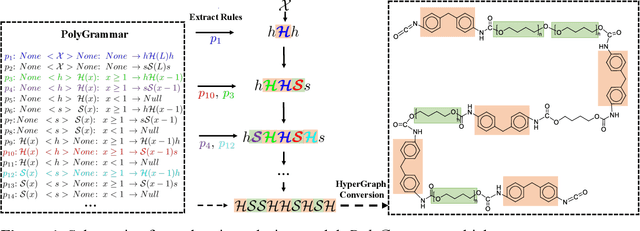
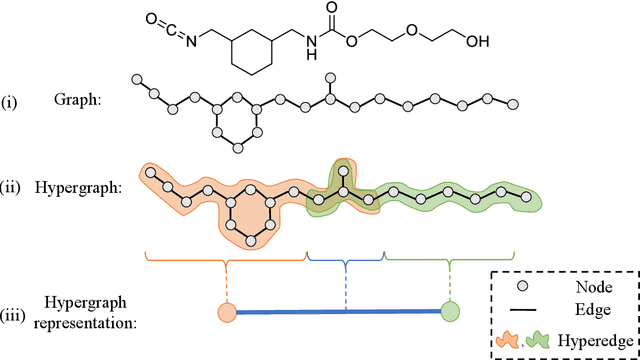
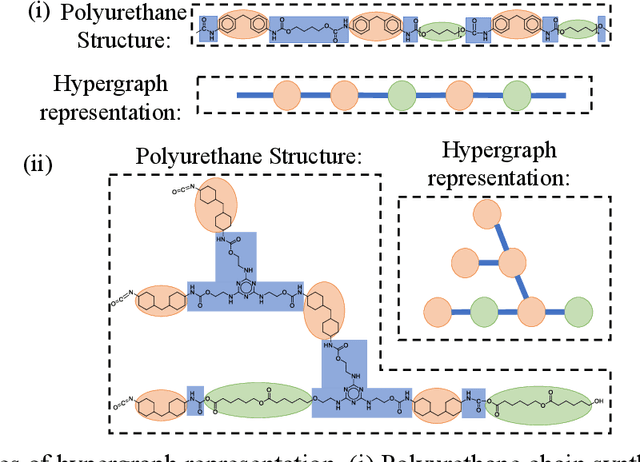
Polymers are widely-studied materials with diverse properties and applications determined by different molecular structures. It is essential to represent these structures clearly and explore the full space of achievable chemical designs. However, existing approaches are unable to offer comprehensive design models for polymers because of their inherent scale and structural complexity. Here, we present a parametric, context-sensitive grammar designed specifically for the representation and generation of polymers. As a demonstrative example, we implement our grammar for polyurethanes. Using our symbolic hypergraph representation and 14 simple production rules, our PolyGrammar is able to represent and generate all valid polyurethane structures. We also present an algorithm to translate any polyurethane structure from the popular SMILES string format into our PolyGrammar representation. We test the representative power of PolyGrammar by translating a dataset of over 600 polyurethane samples collected from literature. Furthermore, we show that PolyGrammar can be easily extended to the other copolymers and homopolymers such as polyacrylates. By offering a complete, explicit representation scheme and an explainable generative model with validity guarantees, our PolyGrammar takes an important step toward a more comprehensive and practical system for polymer discovery and exploration. As the first bridge between formal languages and chemistry, PolyGrammar also serves as a critical blueprint to inform the design of similar grammars for other chemistries, including organic and inorganic molecules.
AutoOED: Automated Optimal Experiment Design Platform
Apr 13, 2021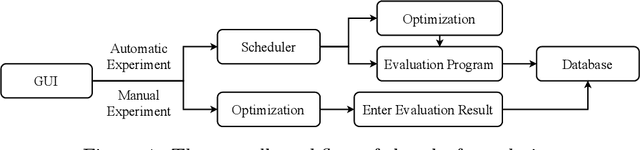

We present AutoOED, an Optimal Experiment Design platform powered with automated machine learning to accelerate the discovery of optimal solutions. The platform solves multi-objective optimization problems in time- and data-efficient manner by automatically guiding the design of experiments to be evaluated. To automate the optimization process, we implement several multi-objective Bayesian optimization algorithms with state-of-the-art performance. AutoOED is open-source and written in Python. The codebase is modular, facilitating extensions and tailoring the code, serving as a testbed for machine learning researchers to easily develop and evaluate their own multi-objective Bayesian optimization algorithms. An intuitive graphical user interface (GUI) is provided to visualize and guide the experiments for users with little or no experience with coding, machine learning, or optimization. Furthermore, a distributed system is integrated to enable parallelized experimental evaluations by independent workers in remote locations. The platform is available at https://autooed.org.