 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to Edge3D Printing of Passively Actuated Self-Folding Robots with Integrated Functional Modules
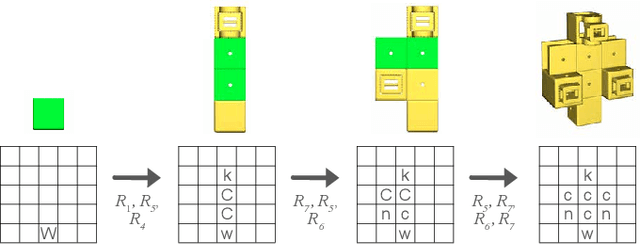
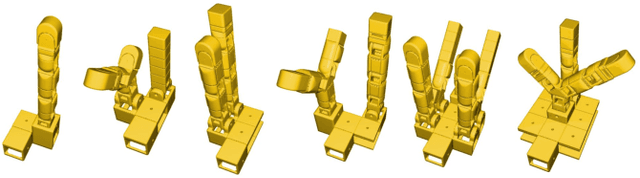
May 06, 2026We introduce an elastic-driven self-folding approach that fabricates robots directly from flat 3D-printed conductive PLA nets. Elastic bands routed through printed hooks store energy that folds the sheet into programmed 3D geometries, while the flat state allows accurate placement of electronics and magnets before deployment. The same substrate doubles as electrodes for capacitive touch and supports a reusable platform I/O palette with Hall sensors and eccentric rotating mass (ERM) motors for docking detection and vibration actuation. We also derive a closed-form folding model that balances hinge stiffness with elastic band moment to predict equilibrium fold angles; experiments validate the model and yield a design map linking hinge thickness, band size, and hook spacing to target angles. Using this workflow we realize multiple polyhedral modules and demonstrate three applications: a cube that highlights the potential of self-folding for scalable modular robot collectives, a deployable gripper, and a tendon-driven finger. The method is low cost, stimulus-free, and integrates actuation and sensing.
Shared Representation for 3D Pose Estimation, Action Classification, and Progress Prediction from Tactile Signals
Mar 26, 2026Estimating human pose, classifying actions, and predicting movement progress are essential for human-robot interaction. While vision-based methods suffer from occlusion and privacy concerns in realistic environments, tactile sensing avoids these issues. However, prior tactile-based approaches handle each task separately, leading to suboptimal performance. In this study, we propose a Shared COnvolutional Transformer for Tactile Inference (SCOTTI) that learns a shared representation to simultaneously address three separate prediction tasks: 3D human pose estimation, action class categorization, and action completion progress estimation. To the best of our knowledge, this is the first work to explore action progress prediction using foot tactile signals from custom wireless insole sensors. This unified approach leverages the mutual benefits of multi-task learning, enabling the model to achieve improved performance across all three tasks compared to learning them independently. Experimental results demonstrate that SCOTTI outperforms existing approaches across all three tasks. Additionally, we introduce a novel dataset collected from 15 participants performing various activities and exercises, with 7 hours of total duration, across eight different activities.
Zero Shot Deformation Reconstruction for Soft Robots Using a Flexible Sensor Array and Cage Based 3D Gaussian Modeling
Mar 20, 2026We present a zero-shot deformation reconstruction framework for soft robots that operates without any visual supervision at inference time. In this work, zero-shot deformation reconstruction is defined as the ability to infer object-wide deformations on previously unseen soft robots without collecting object-specific deformation data or performing any retraining during deployment. Our method assumes access to a static geometric proxy of the undeformed object, which can be obtained from a STL model. During operation, the system relies exclusively on tactile sensing, enabling camera-free deformation inference. The proposed framework integrates a flexible piezoresistive sensor array with a geometry-aware, cage-based 3D Gaussian deformation model. Local tactile measurements are mapped to low-dimensional cage control signals and propagated to dense Gaussian primitives to generate globally consistent shape deformations. A graph attention network regresses cage displacements from tactile input, enforcing spatial smoothness and structural continuity via boundary-aware propagation. Given only a nominal geometric proxy and real-time tactile signals, the system performs zero-shot deformation reconstruction of unseen soft robots in bending and twisting motions, while rendering photorealistic RGB in real time. It achieves 0.67 IoU, 0.65 SSIM, and 3.48 mm Chamfer distance, demonstrating strong zero-shot generalization through explicit coupling of tactile sensing and structured geometric deformation.
OPENTOUCH: Bringing Full-Hand Touch to Real-World Interaction
Dec 18, 2025The human hand is our primary interface to the physical world, yet egocentric perception rarely knows when, where, or how forcefully it makes contact. Robust wearable tactile sensors are scarce, and no existing in-the-wild datasets align first-person video with full-hand touch. To bridge the gap between visual perception and physical interaction, we present OpenTouch, the first in-the-wild egocentric full-hand tactile dataset, containing 5.1 hours of synchronized video-touch-pose data and 2,900 curated clips with detailed text annotations. Using OpenTouch, we introduce retrieval and classification benchmarks that probe how touch grounds perception and action. We show that tactile signals provide a compact yet powerful cue for grasp understanding, strengthen cross-modal alignment, and can be reliably retrieved from in-the-wild video queries. By releasing this annotated vision-touch-pose dataset and benchmark, we aim to advance multimodal egocentric perception, embodied learning, and contact-rich robotic manipulation.
LocoTouch: Learning Dexterous Quadrupedal Transport with Tactile Sensing
May 29, 2025Quadrupedal robots have demonstrated remarkable agility and robustness in traversing complex terrains. However, they remain limited in performing object interactions that require sustained contact. In this work, we present LocoTouch, a system that equips quadrupedal robots with tactile sensing to address a challenging task in this category: long-distance transport of unsecured cylindrical objects, which typically requires custom mounting mechanisms to maintain stability. For efficient large-area tactile sensing, we design a high-density distributed tactile sensor array that covers the entire back of the robot. To effectively leverage tactile feedback for locomotion control, we develop a simulation environment with high-fidelity tactile signals, and train tactile-aware transport policies using a two-stage learning pipeline. Furthermore, we design a novel reward function to promote stable, symmetric, and frequency-adaptive locomotion gaits. After training in simulation, LocoTouch transfers zero-shot to the real world, reliably balancing and transporting a wide range of unsecured, cylindrical everyday objects with broadly varying sizes and weights. Thanks to the responsiveness of the tactile sensor and the adaptive gait reward, LocoTouch can robustly balance objects with slippery surfaces over long distances, or even under severe external perturbations.
3D-ViTac: Learning Fine-Grained Manipulation with Visuo-Tactile Sensing
Oct 31, 2024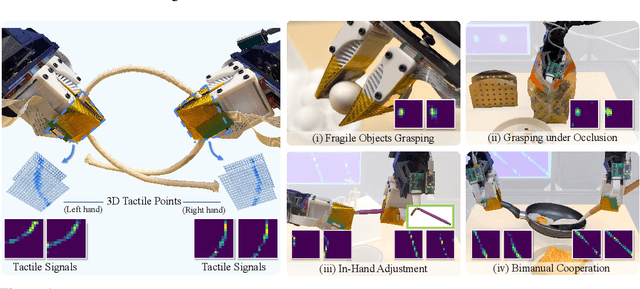

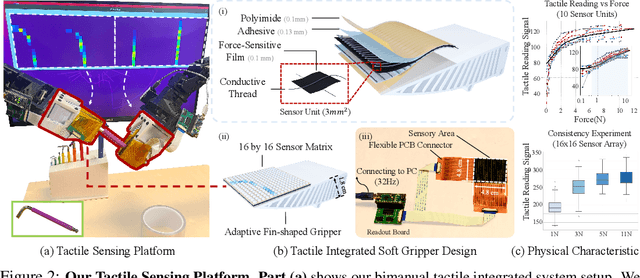

Tactile and visual perception are both crucial for humans to perform fine-grained interactions with their environment. Developing similar multi-modal sensing capabilities for robots can significantly enhance and expand their manipulation skills. This paper introduces \textbf{3D-ViTac}, a multi-modal sensing and learning system designed for dexterous bimanual manipulation. Our system features tactile sensors equipped with dense sensing units, each covering an area of 3$mm^2$. These sensors are low-cost and flexible, providing detailed and extensive coverage of physical contacts, effectively complementing visual information. To integrate tactile and visual data, we fuse them into a unified 3D representation space that preserves their 3D structures and spatial relationships. The multi-modal representation can then be coupled with diffusion policies for imitation learning. Through concrete hardware experiments, we demonstrate that even low-cost robots can perform precise manipulations and significantly outperform vision-only policies, particularly in safe interactions with fragile items and executing long-horizon tasks involving in-hand manipulation. Our project page is available at \url{https://binghao-huang.github.io/3D-ViTac/}.
Enable Natural Tactile Interaction for Robot Dog based on Large-format Distributed Flexible Pressure Sensors
Mar 14, 2023



Touch is an important channel for human-robot interaction, while it is challenging for robots to recognize human touch accurately and make appropriate responses. In this paper, we design and implement a set of large-format distributed flexible pressure sensors on a robot dog to enable natural human-robot tactile interaction. Through a heuristic study, we sorted out 81 tactile gestures commonly used when humans interact with real dogs and 44 dog reactions. A gesture classification algorithm based on ResNet is proposed to recognize these 81 human gestures, and the classification accuracy reaches 98.7%. In addition, an action prediction algorithm based on Transformer is proposed to predict dog actions from human gestures, reaching a 1-gram BLEU score of 0.87. Finally, we compare the tactile interaction with the voice interaction during a freedom human-robot-dog interactive playing study. The results show that tactile interaction plays a more significant role in alleviating user anxiety, stimulating user excitement and improving the acceptability of robot dogs.
* 7 pages, 5 figures
Computational Discovery of Microstructured Composites with Optimal Strength-Toughness Trade-Offs
Feb 01, 2023The conflict between strength and toughness is a fundamental problem in engineering materials design. However, systematic discovery of microstructured composites with optimal strength-toughness trade-offs has never been demonstrated due to the discrepancies between simulation and reality and the lack of data-efficient exploration of the entire Pareto front. Here, we report a widely applicable pipeline harnessing physical experiments, numerical simulations, and artificial neural networks to efficiently discover microstructured designs that are simultaneously tough and strong. Using a physics-based simulator with moderate complexity, our strategy runs a data-driven proposal-validation workflow in a nested-loop fashion to bridge the gap between simulation and reality in high sample efficiency. Without any prescribed expert knowledge of materials design, our approach automatically identifies existing toughness enhancement mechanisms that were traditionally discovered through trial-and-error or biomimicry. We provide a blueprint for the computational discovery of optimal designs, which inverts traditional scientific approaches, and is applicable to a wide range of research problems beyond composites, including polymer chemistry, fluid dynamics, meteorology, and robotics.
An Integrated Design Pipeline for Tactile Sensing Robotic Manipulators
Apr 14, 2022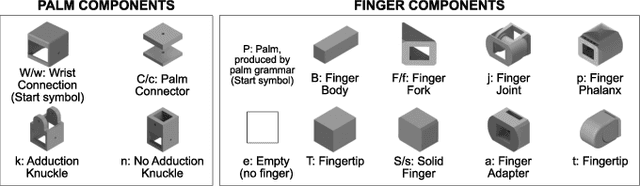
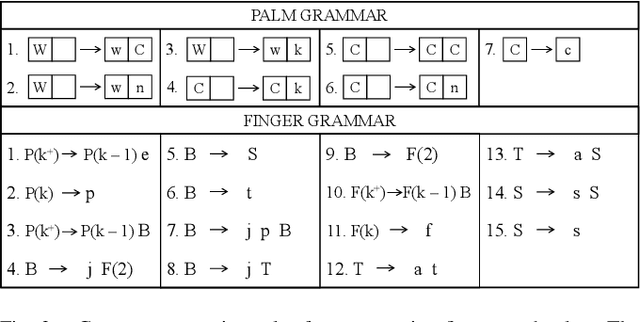
Traditional robotic manipulator design methods require extensive, time-consuming, and manual trial and error to produce a viable design. During this process, engineers often spend their time redesigning or reshaping components as they discover better topologies for the robotic manipulator. Tactile sensors, while useful, often complicate the design due to their bulky form factor. We propose an integrated design pipeline to streamline the design and manufacturing of robotic manipulators with knitted, glove-like tactile sensors. The proposed pipeline allows a designer to assemble a collection of modular, open-source components by applying predefined graph grammar rules. The end result is an intuitive design paradigm that allows the creation of new virtual designs of manipulators in a matter of minutes. Our framework allows the designer to fine-tune the manipulator's shape through cage-based geometry deformation. Finally, the designer can select surfaces for adding tactile sensing. Once the manipulator design is finished, the program will automatically generate 3D printing and knitting files for manufacturing. We demonstrate the utility of this pipeline by creating four custom manipulators tested on real-world tasks: screwing in a wing screw, sorting water bottles, picking up an egg, and cutting paper with scissors.
Dynamic Modeling of Hand-Object Interactions via Tactile Sensing
Sep 09, 2021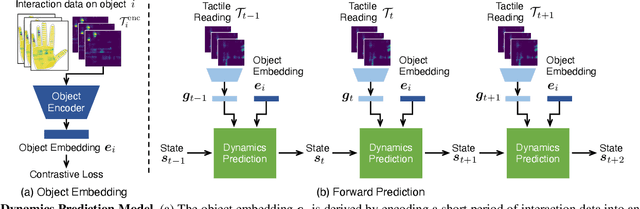
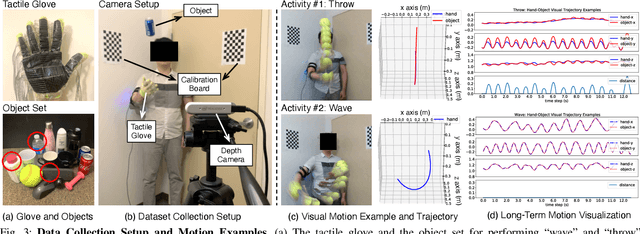
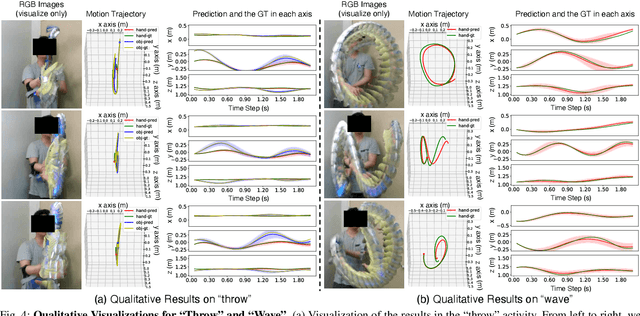
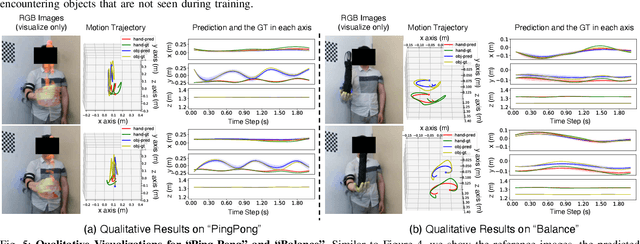
Tactile sensing is critical for humans to perform everyday tasks. While significant progress has been made in analyzing object grasping from vision, it remains unclear how we can utilize tactile sensing to reason about and model the dynamics of hand-object interactions. In this work, we employ a high-resolution tactile glove to perform four different interactive activities on a diversified set of objects. We build our model on a cross-modal learning framework and generate the labels using a visual processing pipeline to supervise the tactile model, which can then be used on its own during the test time. The tactile model aims to predict the 3d locations of both the hand and the object purely from the touch data by combining a predictive model and a contrastive learning module. This framework can reason about the interaction patterns from the tactile data, hallucinate the changes in the environment, estimate the uncertainty of the prediction, and generalize to unseen objects. We also provide detailed ablation studies regarding different system designs as well as visualizations of the predicted trajectories. This work takes a step on dynamics modeling in hand-object interactions from dense tactile sensing, which opens the door for future applications in activity learning, human-computer interactions, and imitation learning for robotics.