 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeFaithful Contouring: Near-Lossless 3D Voxel Representation Free from Iso-surface
Nov 12, 2025



Accurate and efficient voxelized representations of 3D meshes are the foundation of 3D reconstruction and generation. However, existing representations based on iso-surface heavily rely on water-tightening or rendering optimization, which inevitably compromise geometric fidelity. We propose Faithful Contouring, a sparse voxelized representation that supports 2048+ resolutions for arbitrary meshes, requiring neither converting meshes to field functions nor extracting the isosurface during remeshing. It achieves near-lossless fidelity by preserving sharpness and internal structures, even for challenging cases with complex geometry and topology. The proposed method also shows flexibility for texturing, manipulation, and editing. Beyond representation, we design a dual-mode autoencoder for Faithful Contouring, enabling scalable and detail-preserving shape reconstruction. Extensive experiments show that Faithful Contouring surpasses existing methods in accuracy and efficiency for both representation and reconstruction. For direct representation, it achieves distance errors at the $10^{-5}$ level; for mesh reconstruction, it yields a 93\% reduction in Chamfer Distance and a 35\% improvement in F-score over strong baselines, confirming superior fidelity as a representation for 3D learning tasks.
Parallel Proportional Fusion of Spiking Quantum Neural Network for Optimizing Image Classification
Apr 01, 2024The recent emergence of the hybrid quantum-classical neural network (HQCNN) architecture has garnered considerable attention due to the potential advantages associated with integrating quantum principles to enhance various facets of machine learning algorithms and computations. However, the current investigated serial structure of HQCNN, wherein information sequentially passes from one network to another, often imposes limitations on the trainability and expressivity of the network. In this study, we introduce a novel architecture termed Parallel Proportional Fusion of Quantum and Spiking Neural Networks (PPF-QSNN). The dataset information is simultaneously fed into both the spiking neural network and the variational quantum circuits, with the outputs amalgamated in proportion to their individual contributions. We systematically assess the impact of diverse PPF-QSNN parameters on network performance for image classification, aiming to identify the optimal configuration. Numerical results on the MNIST dataset unequivocally illustrate that our proposed PPF-QSNN outperforms both the existing spiking neural network and the serial quantum neural network across metrics such as accuracy, loss, and robustness. This study introduces a novel and effective amalgamation approach for HQCNN, thereby laying the groundwork for the advancement and application of quantum advantage in artificial intelligent computations.
Computational Discovery of Microstructured Composites with Optimal Strength-Toughness Trade-Offs
Feb 01, 2023The conflict between strength and toughness is a fundamental problem in engineering materials design. However, systematic discovery of microstructured composites with optimal strength-toughness trade-offs has never been demonstrated due to the discrepancies between simulation and reality and the lack of data-efficient exploration of the entire Pareto front. Here, we report a widely applicable pipeline harnessing physical experiments, numerical simulations, and artificial neural networks to efficiently discover microstructured designs that are simultaneously tough and strong. Using a physics-based simulator with moderate complexity, our strategy runs a data-driven proposal-validation workflow in a nested-loop fashion to bridge the gap between simulation and reality in high sample efficiency. Without any prescribed expert knowledge of materials design, our approach automatically identifies existing toughness enhancement mechanisms that were traditionally discovered through trial-and-error or biomimicry. We provide a blueprint for the computational discovery of optimal designs, which inverts traditional scientific approaches, and is applicable to a wide range of research problems beyond composites, including polymer chemistry, fluid dynamics, meteorology, and robotics.
Complex Locomotion Skill Learning via Differentiable Physics
Jun 06, 2022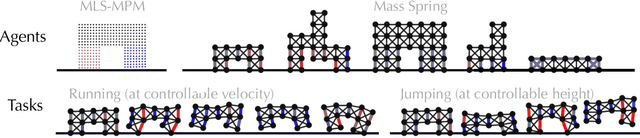



Differentiable physics enables efficient gradient-based optimizations of neural network (NN) controllers. However, existing work typically only delivers NN controllers with limited capability and generalizability. We present a practical learning framework that outputs unified NN controllers capable of tasks with significantly improved complexity and diversity. To systematically improve training robustness and efficiency, we investigated a suite of improvements over the baseline approach, including periodic activation functions, and tailored loss functions. In addition, we find our adoption of batching and an Adam optimizer effective in training complex locomotion tasks. We evaluate our framework on differentiable mass-spring and material point method (MPM) simulations, with challenging locomotion tasks and multiple robot designs. Experiments show that our learning framework, based on differentiable physics, delivers better results than reinforcement learning and converges much faster. We demonstrate that users can interactively control soft robot locomotion and switch among multiple goals with specified velocity, height, and direction instructions using a unified NN controller trained in our system.
PlasticineLab: A Soft-Body Manipulation Benchmark with Differentiable Physics
Apr 07, 2021


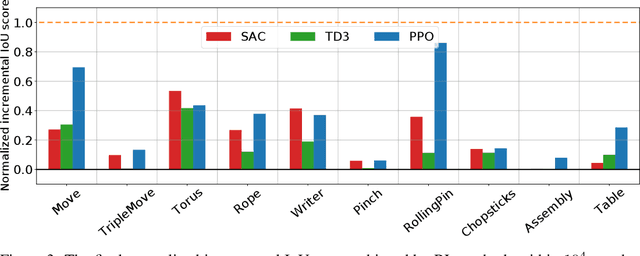
Simulated virtual environments serve as one of the main driving forces behind developing and evaluating skill learning algorithms. However, existing environments typically only simulate rigid body physics. Additionally, the simulation process usually does not provide gradients that might be useful for planning and control optimizations. We introduce a new differentiable physics benchmark called PasticineLab, which includes a diverse collection of soft body manipulation tasks. In each task, the agent uses manipulators to deform the plasticine into the desired configuration. The underlying physics engine supports differentiable elastic and plastic deformation using the DiffTaichi system, posing many under-explored challenges to robotic agents. We evaluate several existing reinforcement learning (RL) methods and gradient-based methods on this benchmark. Experimental results suggest that 1) RL-based approaches struggle to solve most of the tasks efficiently; 2) gradient-based approaches, by optimizing open-loop control sequences with the built-in differentiable physics engine, can rapidly find a solution within tens of iterations, but still fall short on multi-stage tasks that require long-term planning. We expect that PlasticineLab will encourage the development of novel algorithms that combine differentiable physics and RL for more complex physics-based skill learning tasks.
AsyncTaichi: Whole-Program Optimizations for Megakernel Sparse Computation and Differentiable Programming
Dec 15, 2020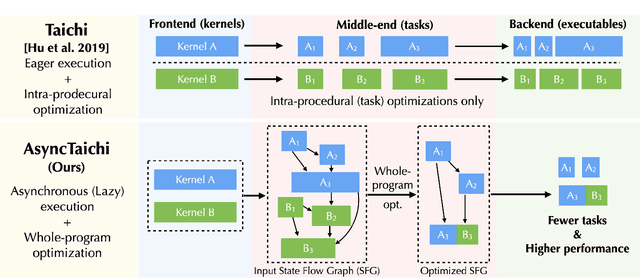
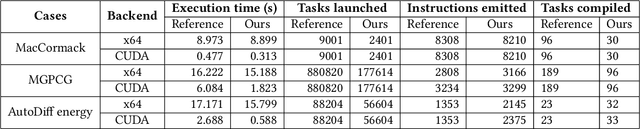

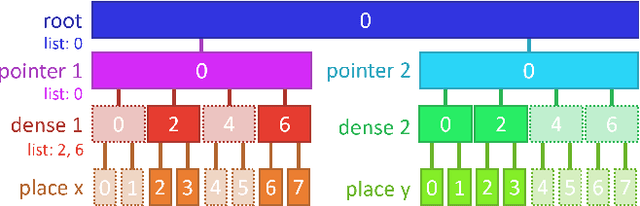
We present a whole-program optimization framework for the Taichi programming language. As an imperative language tailored for sparse and differentiable computation, Taichi's unique computational patterns lead to attractive optimization opportunities that do not present in other compiler or runtime systems. For example, to support iteration over sparse voxel grids, excessive list generation tasks are often inserted. By analyzing sparse computation programs at a higher level, our optimizer is able to remove the majority of unnecessary list generation tasks. To provide maximum programming flexibility, our optimization system conducts on-the-fly optimization of the whole computational graph consisting of Taichi kernels. The optimized Taichi kernels are then just-in-time compiled in parallel, and dispatched to parallel devices such as multithreaded CPU and massively parallel GPUs. Without any code modification on Taichi programs, our new system leads to $3.07 - 3.90\times$ fewer kernel launches and $1.73 - 2.76\times$ speed up on our benchmarks including sparse-grid physical simulation and differentiable programming.
DiffTaichi: Differentiable Programming for Physical Simulation
Oct 01, 2019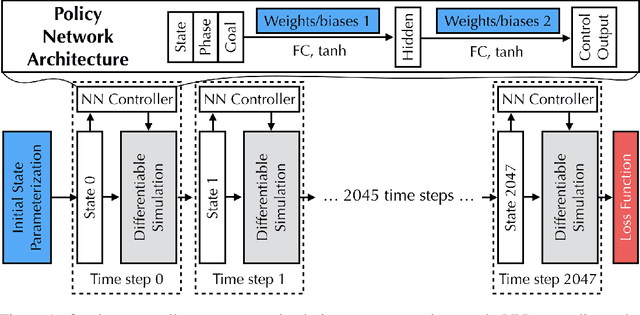

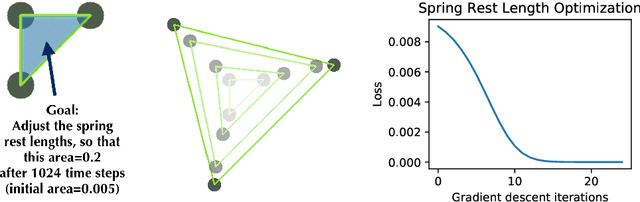
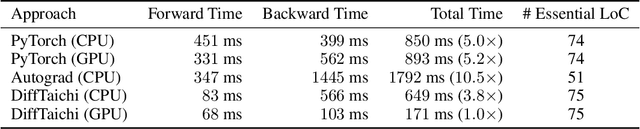
We study the problem of learning and optimizing through physical simulations via differentiable programming. We present DiffTaichi, a new differentiable programming language tailored for building high-performance differentiable physical simulations. We demonstrate the performance and productivity of our language in gradient-based learning and optimization tasks on 10 different physical simulators. For example, a differentiable elastic object simulator written in our language is 4.2x faster than the hand-engineered CUDA version yet runs as fast, and is 188x faster than TensorFlow. Using our differentiable programs, neural network controllers are typically optimized within only tens of iterations. Finally, we share the lessons learned from our experience developing these simulators, that is, differentiating physical simulators does not always yield useful gradients of the physical system being simulated. We systematically study the underlying reasons and propose solutions to improve gradient quality.
ChainQueen: A Real-Time Differentiable Physical Simulator for Soft Robotics
Oct 02, 2018



Physical simulators have been widely used in robot planning and control. Among them, differentiable simulators are particularly favored, as they can be incorporated into gradient-based optimization algorithms that are efficient in solving inverse problems such as optimal control and motion planning. Simulating deformable objects is, however, more challenging compared to rigid body dynamics. The underlying physical laws of deformable objects are more complex, and the resulting systems have orders of magnitude more degrees of freedom and therefore they are significantly more computationally expensive to simulate. Computing gradients with respect to physical design or controller parameters is typically even more computationally challenging. In this paper, we propose a real-time, differentiable hybrid Lagrangian-Eulerian physical simulator for deformable objects, ChainQueen, based on the Moving Least Squares Material Point Method (MLS-MPM). MLS-MPM can simulate deformable objects including contact and can be seamlessly incorporated into inference, control and co-design systems. We demonstrate that our simulator achieves high precision in both forward simulation and backward gradient computation. We have successfully employed it in a diverse set of control tasks for soft robots, including problems with nearly 3,000 decision variables.
Exposure: A White-Box Photo Post-Processing Framework
Feb 06, 2018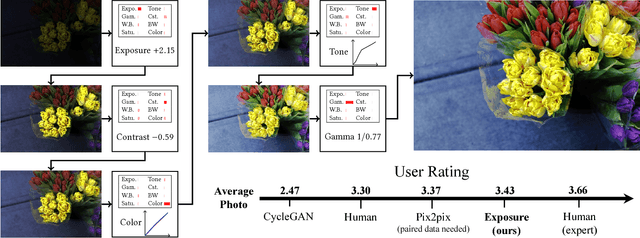

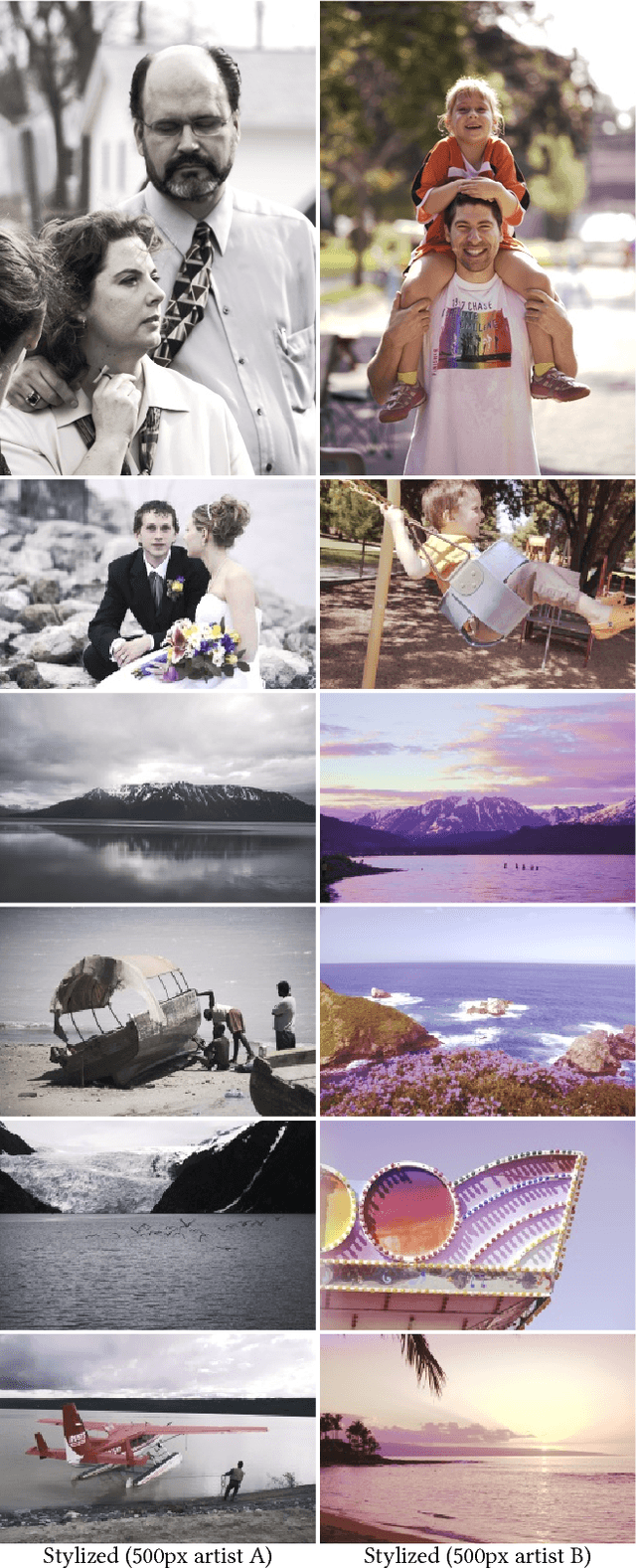
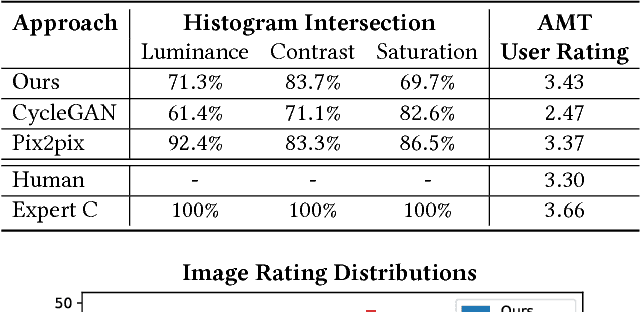
Retouching can significantly elevate the visual appeal of photos, but many casual photographers lack the expertise to do this well. To address this problem, previous works have proposed automatic retouching systems based on supervised learning from paired training images acquired before and after manual editing. As it is difficult for users to acquire paired images that reflect their retouching preferences, we present in this paper a deep learning approach that is instead trained on unpaired data, namely a set of photographs that exhibits a retouching style the user likes, which is much easier to collect. Our system is formulated using deep convolutional neural networks that learn to apply different retouching operations on an input image. Network training with respect to various types of edits is enabled by modeling these retouching operations in a unified manner as resolution-independent differentiable filters. To apply the filters in a proper sequence and with suitable parameters, we employ a deep reinforcement learning approach that learns to make decisions on what action to take next, given the current state of the image. In contrast to many deep learning systems, ours provides users with an understandable solution in the form of conventional retouching edits, rather than just a "black-box" result. Through quantitative comparisons and user studies, we show that this technique generates retouching results consistent with the provided photo set.