 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeEnlightenment Period Improving DNN Performance
Apr 02, 2025In the early stage of deep neural network training, the loss decreases rapidly before gradually leveling off. Extensive research has shown that during this stage, the model parameters undergo significant changes and their distribution is largely established. Existing studies suggest that the introduction of noise during early training can degrade model performance. We identify a critical "enlightenment period" encompassing up to the first 4% of the training cycle (1--20 epochs for 500-epoch training schedules), a phase characterized by intense parameter fluctuations and heightened noise sensitivity. Our findings reveal that strategically reducing noise during this brief phase--by disabling data augmentation techniques such as Mixup or removing high-loss samples--leads to statistically significant improvements in model performance. This work opens new avenues for exploring the relationship between the enlightenment period and network training dynamics across diverse model architectures and tasks.
Mitigating Privacy Risks in LLM Embeddings from Embedding Inversion
Nov 06, 2024



Embeddings have become a cornerstone in the functionality of large language models (LLMs) due to their ability to transform text data into rich, dense numerical representations that capture semantic and syntactic properties. These embedding vector databases serve as the long-term memory of LLMs, enabling efficient handling of a wide range of natural language processing tasks. However, the surge in popularity of embedding vector databases in LLMs has been accompanied by significant concerns about privacy leakage. Embedding vector databases are particularly vulnerable to embedding inversion attacks, where adversaries can exploit the embeddings to reverse-engineer and extract sensitive information from the original text data. Existing defense mechanisms have shown limitations, often struggling to balance security with the performance of downstream tasks. To address these challenges, we introduce Eguard, a novel defense mechanism designed to mitigate embedding inversion attacks. Eguard employs a transformer-based projection network and text mutual information optimization to safeguard embeddings while preserving the utility of LLMs. Our approach significantly reduces privacy risks, protecting over 95% of tokens from inversion while maintaining high performance across downstream tasks consistent with original embeddings.
Digital Twin System for Home Service Robot Based on Motion Simulation
Sep 12, 2023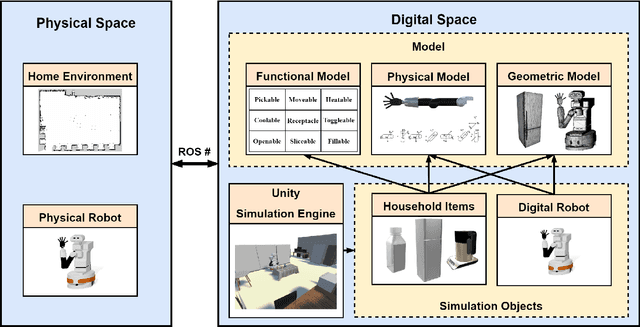
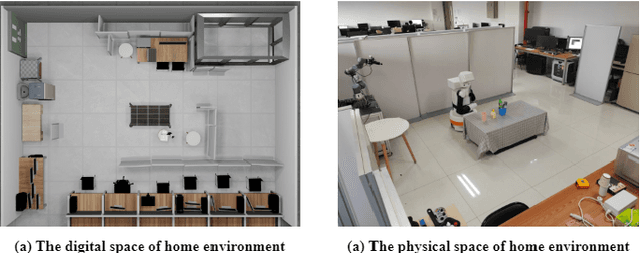
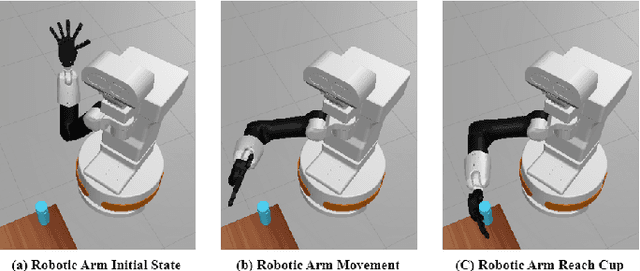
In order to improve the task execution capability of home service robot, and to cope with the problem that purely physical robot platforms cannot sense the environment and make decisions online, a method for building digital twin system for home service robot based on motion simulation is proposed. A reliable mapping of the home service robot and its working environment from physical space to digital space is achieved in three dimensions: geometric, physical and functional. In this system, a digital space-oriented URDF file parser is designed and implemented for the automatic construction of the robot geometric model. Next, the physical model is constructed from the kinematic equations of the robot and an improved particle swarm optimization algorithm is proposed for the inverse kinematic solution. In addition, to adapt to the home environment, functional attributes are used to describe household objects, thus improving the semantic description of the digital space for the real home environment. Finally, through geometric model consistency verification, physical model validity verification and virtual-reality consistency verification, it shows that the digital twin system designed in this paper can construct the robot geometric model accurately and completely, complete the operation of household objects successfully, and the digital twin system is effective and practical.
Connectional-Style-Guided Contextual Representation Learning for Brain Disease Diagnosis
Jun 08, 2023Structural magnetic resonance imaging (sMRI) has shown great clinical value and has been widely used in deep learning (DL) based computer-aided brain disease diagnosis. Previous approaches focused on local shapes and textures in sMRI that may be significant only within a particular domain. The learned representations are likely to contain spurious information and have a poor generalization ability in other diseases and datasets. To facilitate capturing meaningful and robust features, it is necessary to first comprehensively understand the intrinsic pattern of the brain that is not restricted within a single data/task domain. Considering that the brain is a complex connectome of interlinked neurons, the connectional properties in the brain have strong biological significance, which is shared across multiple domains and covers most pathological information. In this work, we propose a connectional style contextual representation learning model (CS-CRL) to capture the intrinsic pattern of the brain, used for multiple brain disease diagnosis. Specifically, it has a vision transformer (ViT) encoder and leverages mask reconstruction as the proxy task and Gram matrices to guide the representation of connectional information. It facilitates the capture of global context and the aggregation of features with biological plausibility. The results indicate that CS-CRL achieves superior accuracy in multiple brain disease diagnosis tasks across six datasets and three diseases and outperforms state-of-the-art models. Furthermore, we demonstrate that CS-CRL captures more brain-network-like properties, better aggregates features, is easier to optimize and is more robust to noise, which explains its superiority in theory. Our source code will be released soon.
Complex Locomotion Skill Learning via Differentiable Physics
Jun 06, 2022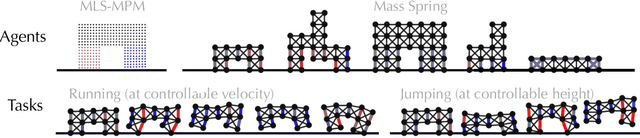



Differentiable physics enables efficient gradient-based optimizations of neural network (NN) controllers. However, existing work typically only delivers NN controllers with limited capability and generalizability. We present a practical learning framework that outputs unified NN controllers capable of tasks with significantly improved complexity and diversity. To systematically improve training robustness and efficiency, we investigated a suite of improvements over the baseline approach, including periodic activation functions, and tailored loss functions. In addition, we find our adoption of batching and an Adam optimizer effective in training complex locomotion tasks. We evaluate our framework on differentiable mass-spring and material point method (MPM) simulations, with challenging locomotion tasks and multiple robot designs. Experiments show that our learning framework, based on differentiable physics, delivers better results than reinforcement learning and converges much faster. We demonstrate that users can interactively control soft robot locomotion and switch among multiple goals with specified velocity, height, and direction instructions using a unified NN controller trained in our system.
Boosting Connectivity in Retinal Vessel Segmentation via a Recursive Semantics-Guided Network
Apr 24, 2020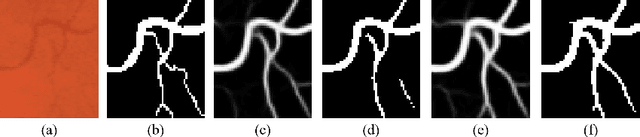
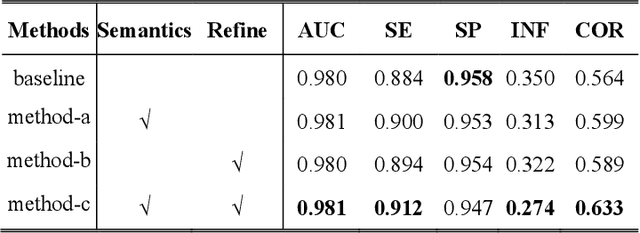
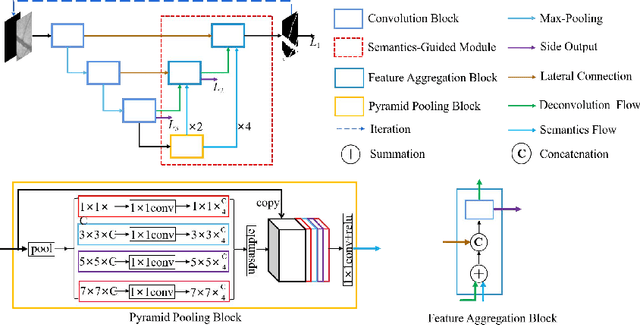
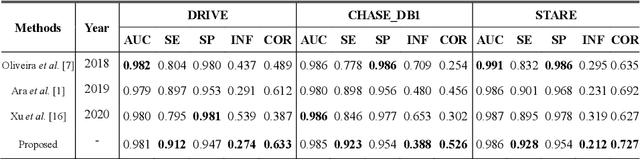
Many deep learning based methods have been proposed for retinal vessel segmentation, however few of them focus on the connectivity of segmented vessels, which is quite important for a practical computer-aided diagnosis system on retinal images. In this paper, we propose an efficient network to address this problem. A U-shape network is enhanced by introducing a semantics-guided module, which integrates the enriched semantics information to shallow layers for guiding the network to explore more powerful features. Besides, a recursive refinement iteratively applies the same network over the previous segmentation results for progressively boosting the performance while increasing no extra network parameters. The carefully designed recursive semantics-guided network has been extensively evaluated on several public datasets. Experimental results have shown the efficiency of the proposed method.
Kernel Machines With Missing Responses
Jun 07, 2018
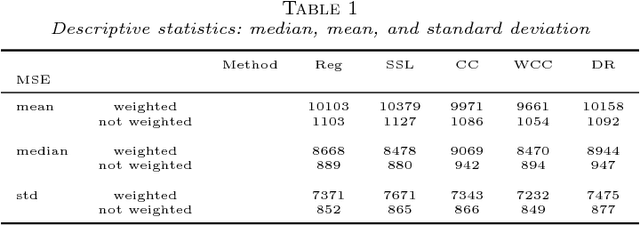
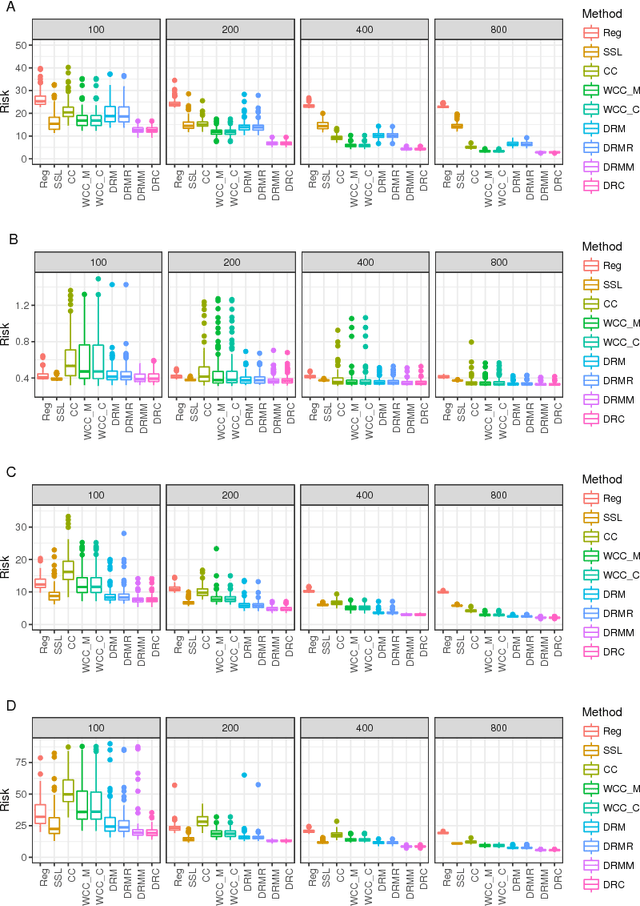
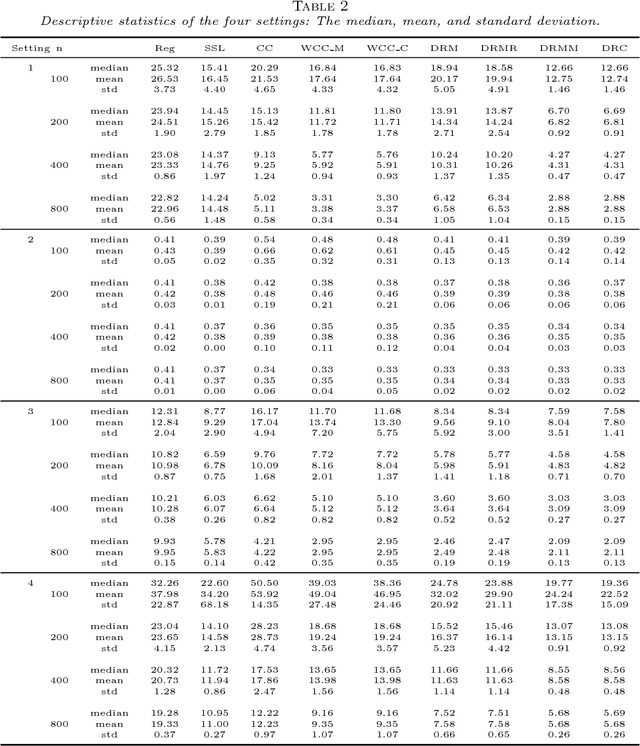
Missing responses is a missing data format in which outcomes are not always observed. In this work we develop kernel machines that can handle missing responses. First, we propose a kernel machine family that uses mainly the complete cases. For the quadratic loss, we then propose a family of doubly-robust kernel machines. The proposed kernel-machine estimators can be applied to both regression and classification problems. We prove oracle inequalities for the finite-sample differences between the kernel machine risk and Bayes risk. We use these oracle inequalities to prove consistency and to calculate convergence rates. We demonstrate the performance of the two proposed kernel machine families using both a simulation study and a real-world data analysis.