 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeVR-GS: A Physical Dynamics-Aware Interactive Gaussian Splatting System in Virtual Reality
Jan 30, 2024



As consumer Virtual Reality (VR) and Mixed Reality (MR) technologies gain momentum, there's a growing focus on the development of engagements with 3D virtual content. Unfortunately, traditional techniques for content creation, editing, and interaction within these virtual spaces are fraught with difficulties. They tend to be not only engineering-intensive but also require extensive expertise, which adds to the frustration and inefficiency in virtual object manipulation. Our proposed VR-GS system represents a leap forward in human-centered 3D content interaction, offering a seamless and intuitive user experience. By developing a physical dynamics-aware interactive Gaussian Splatting in a Virtual Reality setting, and constructing a highly efficient two-level embedding strategy alongside deformable body simulations, VR-GS ensures real-time execution with highly realistic dynamic responses. The components of our Virtual Reality system are designed for high efficiency and effectiveness, starting from detailed scene reconstruction and object segmentation, advancing through multi-view image in-painting, and extending to interactive physics-based editing. The system also incorporates real-time deformation embedding and dynamic shadow casting, ensuring a comprehensive and engaging virtual experience.Our project page is available at: https://yingjiang96.github.io/VR-GS/.
Neural Stress Fields for Reduced-order Elastoplasticity and Fracture
Oct 26, 2023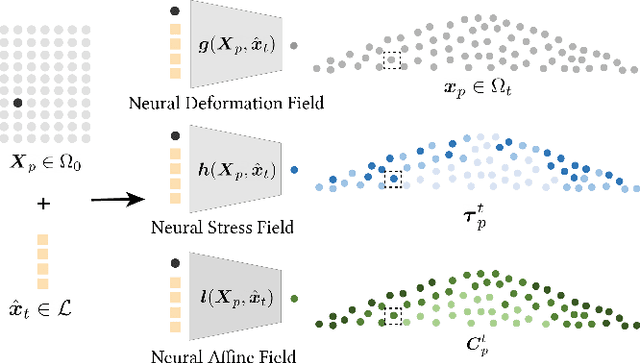
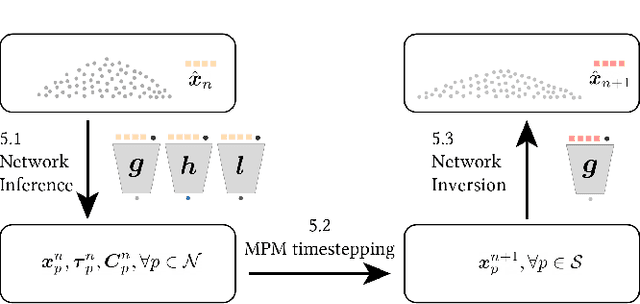
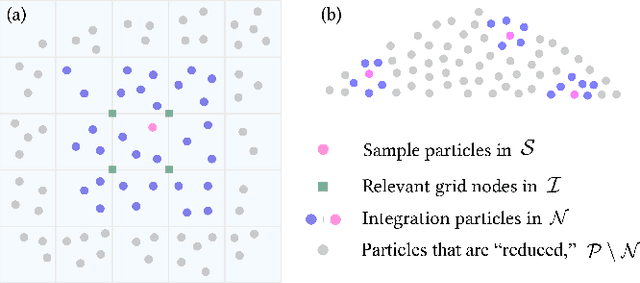
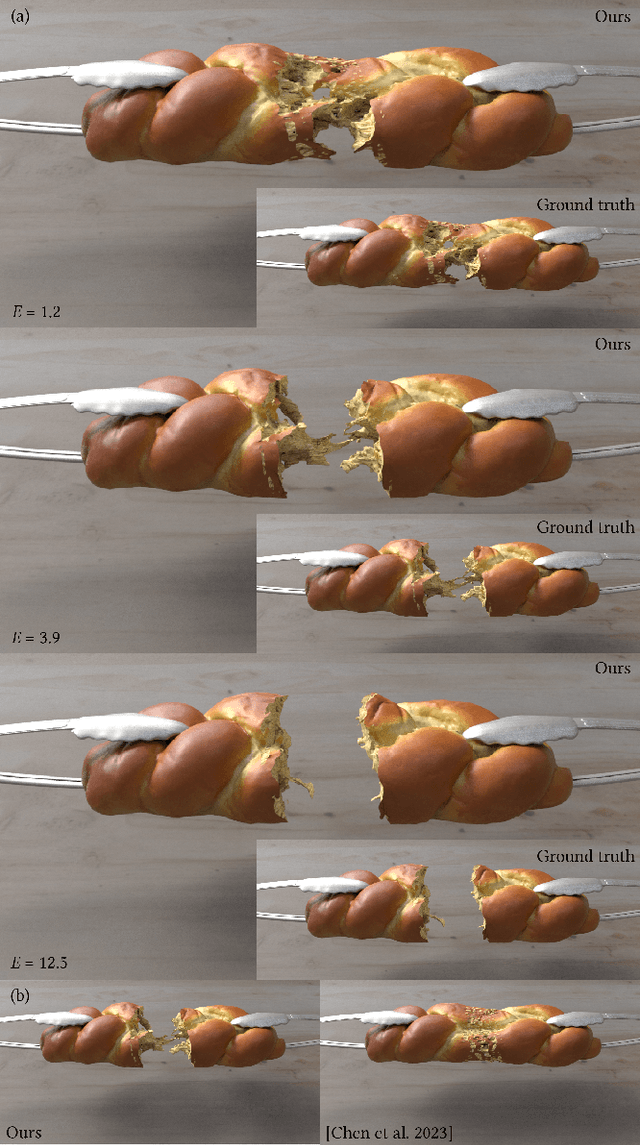
We propose a hybrid neural network and physics framework for reduced-order modeling of elastoplasticity and fracture. State-of-the-art scientific computing models like the Material Point Method (MPM) faithfully simulate large-deformation elastoplasticity and fracture mechanics. However, their long runtime and large memory consumption render them unsuitable for applications constrained by computation time and memory usage, e.g., virtual reality. To overcome these barriers, we propose a reduced-order framework. Our key innovation is training a low-dimensional manifold for the Kirchhoff stress field via an implicit neural representation. This low-dimensional neural stress field (NSF) enables efficient evaluations of stress values and, correspondingly, internal forces at arbitrary spatial locations. In addition, we also train neural deformation and affine fields to build low-dimensional manifolds for the deformation and affine momentum fields. These neural stress, deformation, and affine fields share the same low-dimensional latent space, which uniquely embeds the high-dimensional simulation state. After training, we run new simulations by evolving in this single latent space, which drastically reduces the computation time and memory consumption. Our general continuum-mechanics-based reduced-order framework is applicable to any phenomena governed by the elastodynamics equation. To showcase the versatility of our framework, we simulate a wide range of material behaviors, including elastica, sand, metal, non-Newtonian fluids, fracture, contact, and collision. We demonstrate dimension reduction by up to 100,000X and time savings by up to 10X.
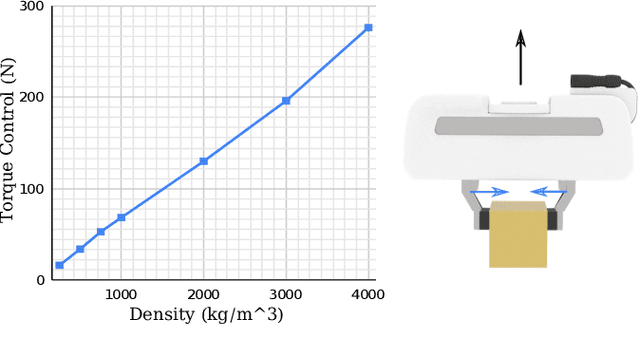
Reconfigurable Data Glove for Reconstructing Physical and Virtual Grasps
Jan 18, 2023We present a reconfigurable data glove design to capture different modes of human hand-object interactions, critical for training embodied AI agents for fine manipulation tasks. Sharing a unified backbone design that reconstructs hand gestures in real-time, our reconfigurable data glove operates in three modes for various downstream tasks with distinct features. In the tactile-sensing mode, the glove system aggregates manipulation force via customized force sensors made from a soft and thin piezoresistive material; this design is to minimize interference during complex hand movements. The Virtual Reality (VR) mode enables real-time interaction in a physically plausible fashion; a caging-based approach is devised to determine stable grasps by detecting collision events. Leveraging a state-of-the-art Finite Element Method (FEM) simulator, the simulation mode collects a fine-grained 4D manipulation event: hand and object motions in 3D space and how the object's physical properties (e.g., stress, energy) change in accord with the manipulation in time. Of note, this glove system is the first to look into, through high-fidelity simulation, the unobservable physical and causal factors behind manipulation actions. In a series of experiments, we characterize our data glove in terms of individual sensors and the overall system. Specifically, we evaluate the system's three modes by (i) recording hand gestures and associated forces, (ii) improving manipulation fluency in VR, and (iii) producing realistic simulation effects of various tool uses, respectively. Together, our reconfigurable data glove collects and reconstructs fine-grained human grasp data in both the physical and virtual environments, opening up new avenues to learning manipulation skills for embodied AI agents.
TPA-Net: Generate A Dataset for Text to Physics-based Animation
Nov 25, 2022Recent breakthroughs in Vision-Language (V&L) joint research have achieved remarkable results in various text-driven tasks. High-quality Text-to-video (T2V), a task that has been long considered mission-impossible, was proven feasible with reasonably good results in latest works. However, the resulting videos often have undesired artifacts largely because the system is purely data-driven and agnostic to the physical laws. To tackle this issue and further push T2V towards high-level physical realism, we present an autonomous data generation technique and a dataset, which intend to narrow the gap with a large number of multi-modal, 3D Text-to-Video/Simulation (T2V/S) data. In the dataset, we provide high-resolution 3D physical simulations for both solids and fluids, along with textual descriptions of the physical phenomena. We take advantage of state-of-the-art physical simulation methods (i) Incremental Potential Contact (IPC) and (ii) Material Point Method (MPM) to simulate diverse scenarios, including elastic deformations, material fractures, collisions, turbulence, etc. Additionally, high-quality, multi-view rendering videos are supplied for the benefit of T2V, Neural Radiance Fields (NeRF), and other communities. This work is the first step towards fully automated Text-to-Video/Simulation (T2V/S). Live examples and subsequent work are at https://sites.google.com/view/tpa-net.
Bi-Stride Multi-Scale Graph Neural Network for Mesh-Based Physical Simulation
Oct 05, 2022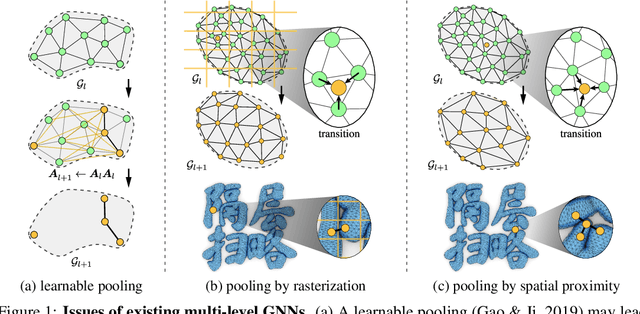
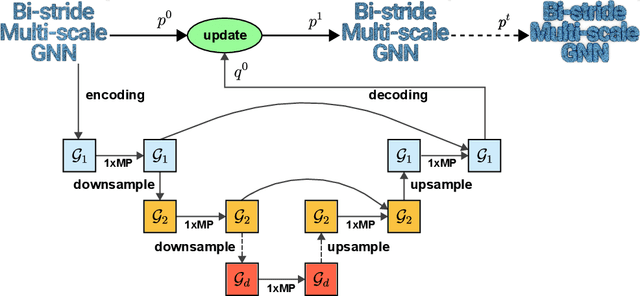


Learning physical systems on unstructured meshes by flat Graph neural networks (GNNs) faces the challenge of modeling the long-range interactions due to the scaling complexity w.r.t. the number of nodes, limiting the generalization under mesh refinement. On regular grids, the convolutional neural networks (CNNs) with a U-net structure can resolve this challenge by efficient stride, pooling, and upsampling operations. Nonetheless, these tools are much less developed for graph neural networks (GNNs), especially when GNNs are employed for learning large-scale mesh-based physics. The challenges arise from the highly irregular meshes and the lack of effective ways to construct the multi-level structure without losing connectivity. Inspired by the bipartite graph determination algorithm, we introduce Bi-Stride Multi-Scale Graph Neural Network (BSMS-GNN) by proposing \textit{bi-stride} as a simple pooling strategy for building the multi-level GNN. \textit{Bi-stride} pools nodes by striding every other BFS frontier; it 1) works robustly on any challenging mesh in the wild, 2) avoids using a mesh generator at coarser levels, 3) avoids the spatial proximity for building coarser levels, and 4) uses non-parametrized aggregating/returning instead of MLPs during pooling and unpooling. Experiments show that our framework significantly outperforms the state-of-the-art method's computational efficiency in representative physics-based simulation cases.
Midas: A Multi-Joint Robotics Simulator with Intersection-Free Frictional Contact
Sep 30, 2022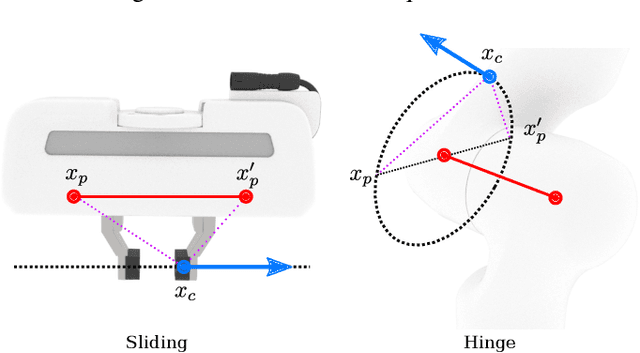
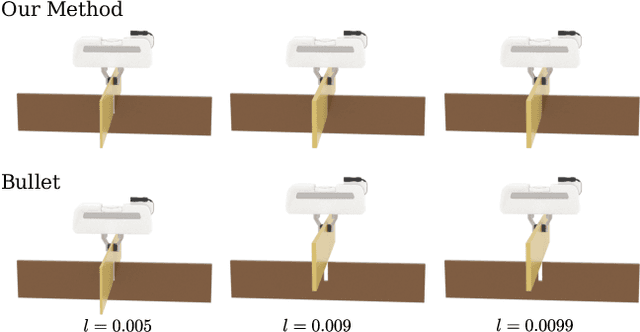

We introduce Midas, a robotics simulation framework based on the Incremental Potential Contact (IPC) model. Our simulator guarantees intersection-free, stable, and accurate resolution of frictional contact. We demonstrate the efficacy of our framework with experimental validations on high-precision tasks and through comparisons with Bullet physics. A reinforcement learning pipeline using Midas is also developed and tested to perform intersection-free peg-in-hole tasks.
Complex Locomotion Skill Learning via Differentiable Physics
Jun 06, 2022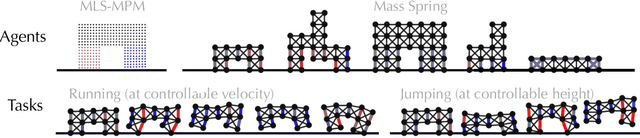



Differentiable physics enables efficient gradient-based optimizations of neural network (NN) controllers. However, existing work typically only delivers NN controllers with limited capability and generalizability. We present a practical learning framework that outputs unified NN controllers capable of tasks with significantly improved complexity and diversity. To systematically improve training robustness and efficiency, we investigated a suite of improvements over the baseline approach, including periodic activation functions, and tailored loss functions. In addition, we find our adoption of batching and an Adam optimizer effective in training complex locomotion tasks. We evaluate our framework on differentiable mass-spring and material point method (MPM) simulations, with challenging locomotion tasks and multiple robot designs. Experiments show that our learning framework, based on differentiable physics, delivers better results than reinforcement learning and converges much faster. We demonstrate that users can interactively control soft robot locomotion and switch among multiple goals with specified velocity, height, and direction instructions using a unified NN controller trained in our system.
Soft Hybrid Aerial Vehicle via Bistable Mechanism
Nov 01, 2020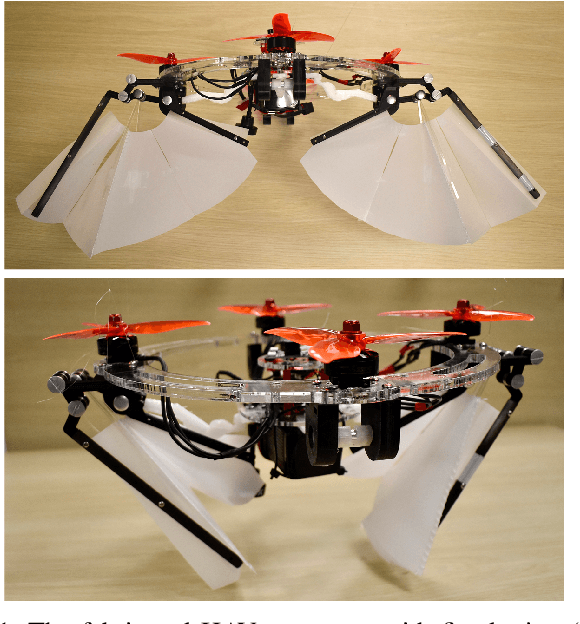
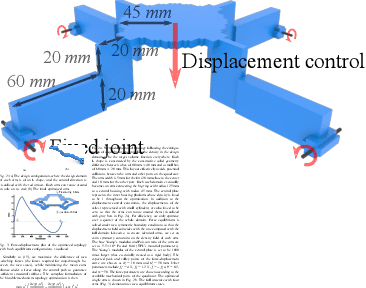
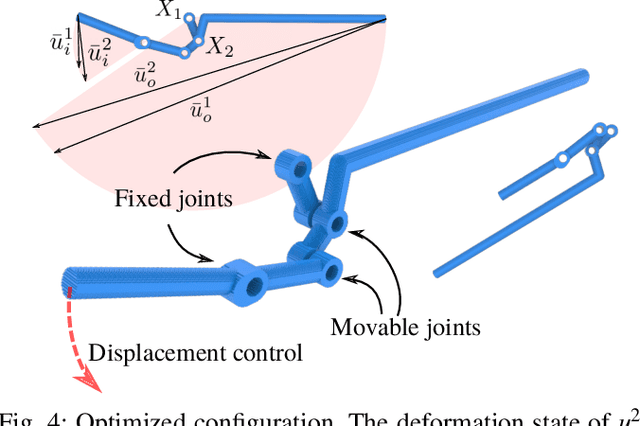
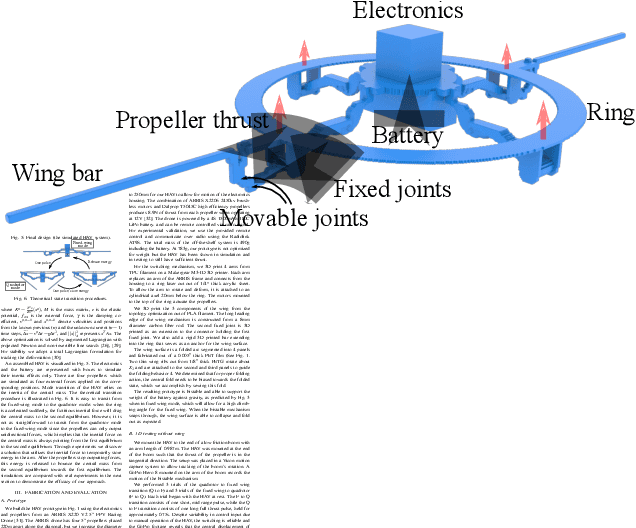
Unmanned aerial vehicles have been demonstrated successfully in a variety of tasks, including surveying and sampling tasks over large areas. These vehicles can take many forms. Quadrotors' agility and ability to hover makes them well suited for navigating potentially tight spaces, while fixed wing aircraft are capable of efficient flight over long distances. Hybrid aerial vehicles (HAVs) attempt to achieve both of these benefits by exhibiting multiple modes; however, morphing HAVs typically require extra actuators which add mass, reducing both agility and efficiency. We propose a morphing HAV with folding wings that exhibits both a quadrotor and a fixed wing mode without requiring any extra actuation. This is achieved by leveraging the motion of a bistable mechanism at the center of the aircraft to drive folding of the wing using only the existing motors and the inertia of the system. We optimize both the bistable mechanism and the folding wing using a topology optimization approach. The resulting mechanisms were fabricated on a 3D printer and attached to an existing quadrotor frame. Our prototype successfully transitions between both modes and our experiments demonstrate that the behavior of the fabricated prototype is consistent with that of the simulation.