 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeReparametrization of 3D CSC Dubins Paths Enabling 2D Search
Mar 13, 2025This paper addresses the Dubins path planning problem for vehicles in 3D space. In particular, we consider the problem of computing CSC paths -- paths that consist of a circular arc (C) followed by a straight segment (S) followed by a circular arc (C). These paths are useful for vehicles such as fixed-wing aircraft and underwater submersibles that are subject to lower bounds on turn radius. We present a new parameterization that reduces the 3D CSC planning problem to a search over 2 variables, thus lowering search complexity, while also providing gradients that assist that search. We use these equations with a numerical solver to explore numbers and types of solutions computed for a variety of planar and 3D scenarios. Our method successfully computes CSC paths for the large majority of test cases, indicating that it could be useful for future generation of robust, efficient curvature-constrained trajectories.
Knowledge-based Neural Ordinary Differential Equations for Cosserat Rod-based Soft Robots
Aug 14, 2024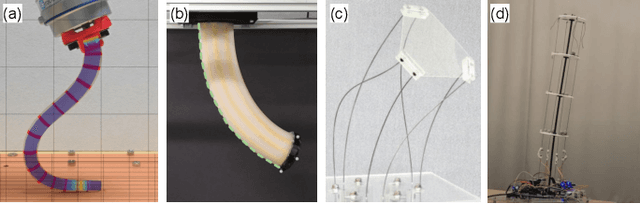



Soft robots have many advantages over rigid robots thanks to their compliant and passive nature. However, it is generally challenging to model the dynamics of soft robots due to their high spatial dimensionality, making it difficult to use model-based methods to accurately control soft robots. It often requires direct numerical simulation of partial differential equations to simulate soft robots. This not only requires an accurate numerical model, but also makes soft robot modeling slow and expensive. Deep learning algorithms have shown promises in data-driven modeling of soft robots. However, these algorithms usually require a large amount of data, which are difficult to obtain in either simulation or real-world experiments of soft robots. In this work, we propose KNODE-Cosserat, a framework that combines first-principle physics models and neural ordinary differential equations. We leverage the best from both worlds -- the generalization ability of physics-based models and the fast speed of deep learning methods. We validate our framework in both simulation and real-world experiments. In both cases, we show that the robot model significantly improves over the baseline models under different metrics.
EvoRobogami: Co-designing with Humans in Evolutionary Robotics Experiments
May 17, 2022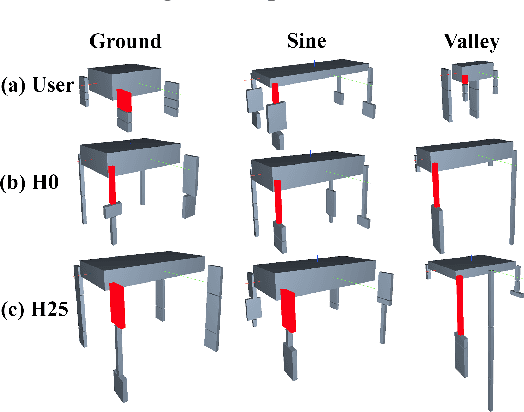
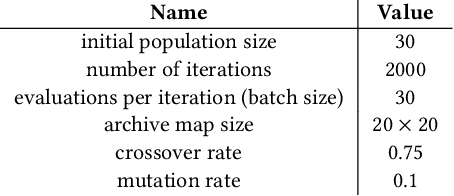
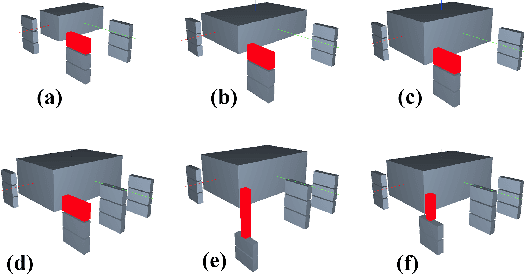
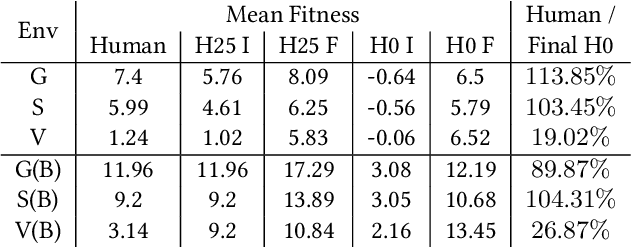
We study the effects of injecting human-generated designs into the initial population of an evolutionary robotics experiment, where subsequent population of robots are optimised via a Genetic Algorithm and MAP-Elites. First, human participants interact via a graphical front-end to explore a directly-parameterised legged robot design space and attempt to produce robots via a combination of intuition and trial-and-error that perform well in a range of environments. Environments are generated whose corresponding high-performance robot designs range from intuitive to complex and hard to grasp. Once the human designs have been collected, their impact on the evolutionary process is assessed by replacing a varying number of designs in the initial population with human designs and subsequently running the evolutionary algorithm. Our results suggest that a balance of random and hand-designed initial solutions provides the best performance for the problems considered, and that human designs are most valuable when the problem is intuitive. The influence of human design in an evolutionary algorithm is a highly understudied area, and the insights in this paper may be valuable to the area of AI-based design more generally.
Soft Hybrid Aerial Vehicle via Bistable Mechanism
Nov 01, 2020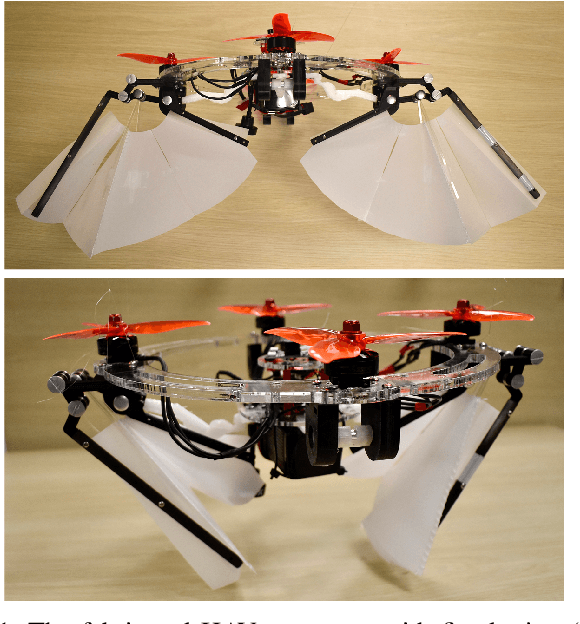
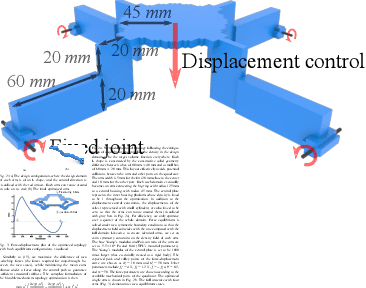
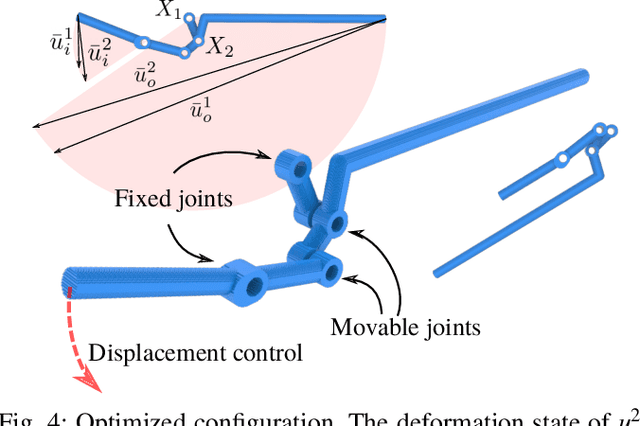
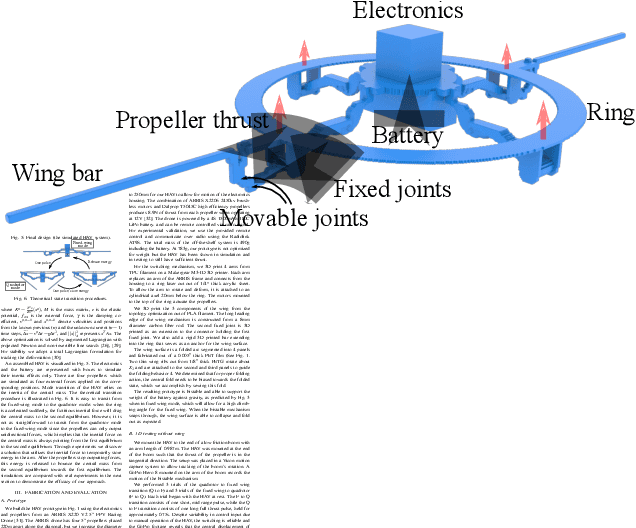
Unmanned aerial vehicles have been demonstrated successfully in a variety of tasks, including surveying and sampling tasks over large areas. These vehicles can take many forms. Quadrotors' agility and ability to hover makes them well suited for navigating potentially tight spaces, while fixed wing aircraft are capable of efficient flight over long distances. Hybrid aerial vehicles (HAVs) attempt to achieve both of these benefits by exhibiting multiple modes; however, morphing HAVs typically require extra actuators which add mass, reducing both agility and efficiency. We propose a morphing HAV with folding wings that exhibits both a quadrotor and a fixed wing mode without requiring any extra actuation. This is achieved by leveraging the motion of a bistable mechanism at the center of the aircraft to drive folding of the wing using only the existing motors and the inertia of the system. We optimize both the bistable mechanism and the folding wing using a topology optimization approach. The resulting mechanisms were fabricated on a 3D printer and attached to an existing quadrotor frame. Our prototype successfully transitions between both modes and our experiments demonstrate that the behavior of the fabricated prototype is consistent with that of the simulation.
Optimal Structure Synthesis for Environment Augmenting Robots
Dec 11, 2018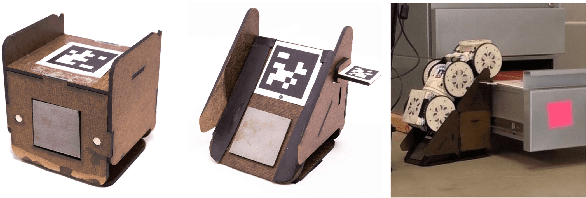
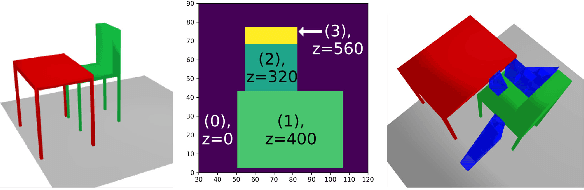
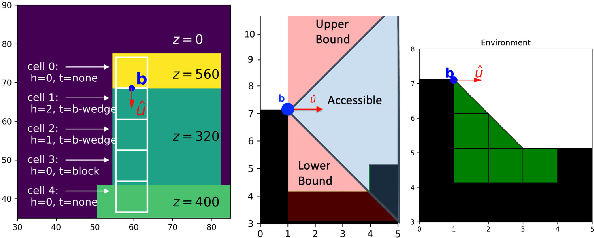
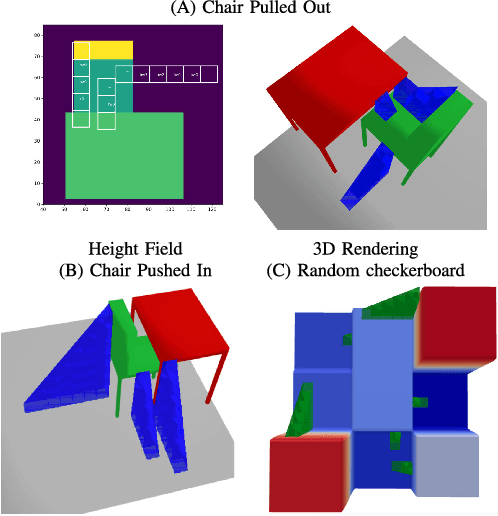
Building structures can allow a robot to surmount large obstacles, expanding the set of areas it can reach. This paper presents a planning algorithm to automatically determine what structures a construction-capable robot must build in order to traverse its entire environment. Given an environment, a set of building blocks, and a robot capable of building structures, we seek a optimal set of structures (using a minimum number of building blocks) that could be built to make the entire environment traversable with respect to the robot's movement capabilities. We show that this problem is NP-Hard, and present a complete, optimal algorithm that solves it using a branch-and-bound strategy. The algorithm runs in exponential time in the worst case, but solves typical problems with practical speed. In hardware experiments, we show that the algorithm solves 3D maps of real indoor environments in about one minute, and that the structures selected by the algorithm allow a robot to traverse the entire environment. An accompanying video is available online at https://youtu.be/B9WM557NP44.
Functional Co-Optimization of Articulated Robots
Jul 20, 2017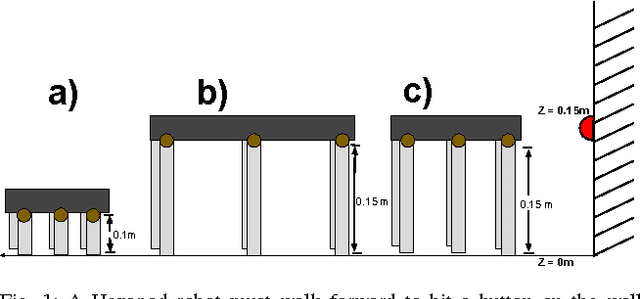
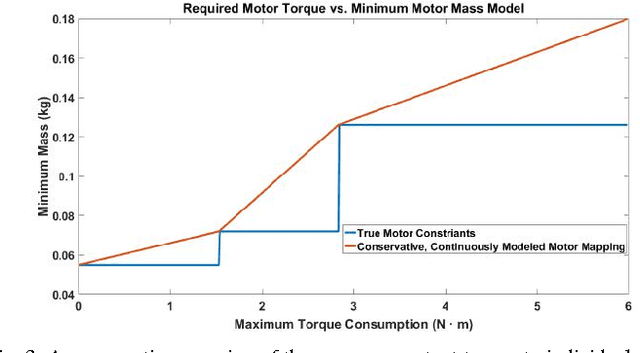
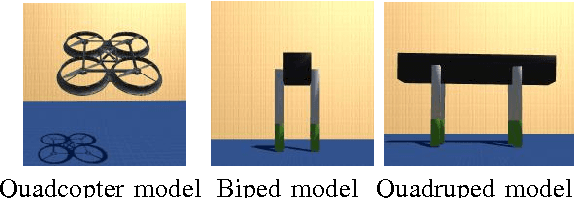
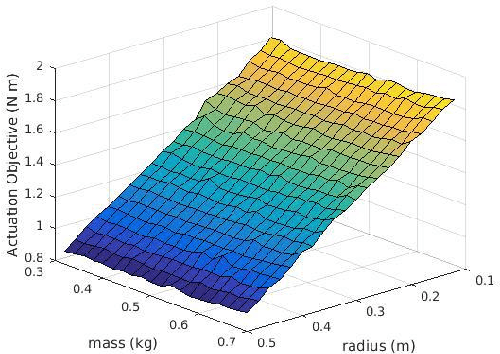
We present parametric trajectory optimization, a method for simultaneously computing physical parameters, actuation requirements, and robot motions for more efficient robot designs. In this scheme, robot dimensions, masses, and other physical parameters are solved for concurrently with traditional motion planning variables, including dynamically consistent robot states, actuation inputs, and contact forces. Our method requires minimal user domain knowledge, requiring only a coarse guess of the target robot configuration sequence and a parameterized robot topology as input. We demonstrate our results on four simulated robots, one of which we physically fabricated in order to demonstrate physical consistency. We demonstrate that by optimizing robot body parameters alongside robot trajectories, motion planning problems which would otherwise be infeasible can be made feasible, and actuation requirements can be significantly reduced.