 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeFunctional Co-Optimization of Articulated Robots
Paper and Code
Jul 20, 2017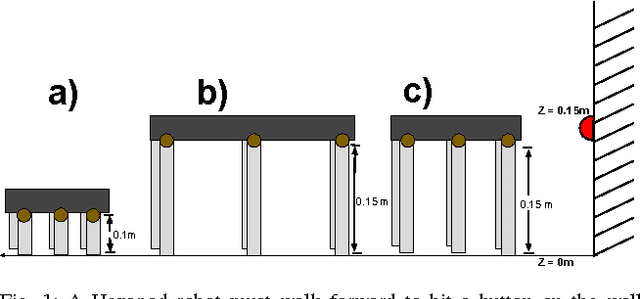
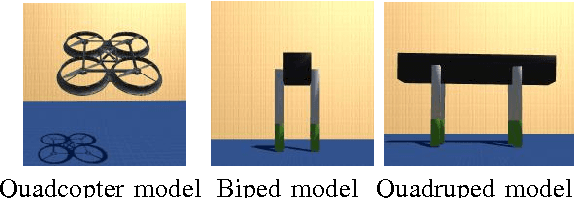
We present parametric trajectory optimization, a method for simultaneously computing physical parameters, actuation requirements, and robot motions for more efficient robot designs. In this scheme, robot dimensions, masses, and other physical parameters are solved for concurrently with traditional motion planning variables, including dynamically consistent robot states, actuation inputs, and contact forces. Our method requires minimal user domain knowledge, requiring only a coarse guess of the target robot configuration sequence and a parameterized robot topology as input. We demonstrate our results on four simulated robots, one of which we physically fabricated in order to demonstrate physical consistency. We demonstrate that by optimizing robot body parameters alongside robot trajectories, motion planning problems which would otherwise be infeasible can be made feasible, and actuation requirements can be significantly reduced.