 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgePhysGaussian: Physics-Integrated 3D Gaussians for Generative Dynamics
Nov 22, 2023



We introduce PhysGaussian, a new method that seamlessly integrates physically grounded Newtonian dynamics within 3D Gaussians to achieve high-quality novel motion synthesis. Employing a custom Material Point Method (MPM), our approach enriches 3D Gaussian kernels with physically meaningful kinematic deformation and mechanical stress attributes, all evolved in line with continuum mechanics principles. A defining characteristic of our method is the seamless integration between physical simulation and visual rendering: both components utilize the same 3D Gaussian kernels as their discrete representations. This negates the necessity for triangle/tetrahedron meshing, marching cubes, "cage meshes," or any other geometry embedding, highlighting the principle of "what you see is what you simulate (WS$^2$)." Our method demonstrates exceptional versatility across a wide variety of materials--including elastic entities, metals, non-Newtonian fluids, and granular materials--showcasing its strong capabilities in creating diverse visual content with novel viewpoints and movements. Our project page is at: https://xpandora.github.io/PhysGaussian/
TPA-Net: Generate A Dataset for Text to Physics-based Animation
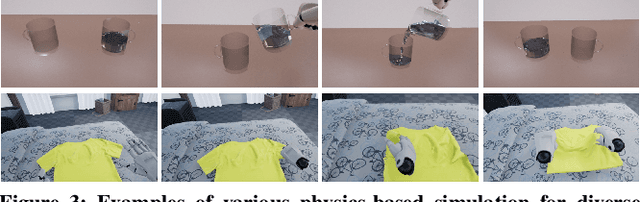
Nov 25, 2022Recent breakthroughs in Vision-Language (V&L) joint research have achieved remarkable results in various text-driven tasks. High-quality Text-to-video (T2V), a task that has been long considered mission-impossible, was proven feasible with reasonably good results in latest works. However, the resulting videos often have undesired artifacts largely because the system is purely data-driven and agnostic to the physical laws. To tackle this issue and further push T2V towards high-level physical realism, we present an autonomous data generation technique and a dataset, which intend to narrow the gap with a large number of multi-modal, 3D Text-to-Video/Simulation (T2V/S) data. In the dataset, we provide high-resolution 3D physical simulations for both solids and fluids, along with textual descriptions of the physical phenomena. We take advantage of state-of-the-art physical simulation methods (i) Incremental Potential Contact (IPC) and (ii) Material Point Method (MPM) to simulate diverse scenarios, including elastic deformations, material fractures, collisions, turbulence, etc. Additionally, high-quality, multi-view rendering videos are supplied for the benefit of T2V, Neural Radiance Fields (NeRF), and other communities. This work is the first step towards fully automated Text-to-Video/Simulation (T2V/S). Live examples and subsequent work are at https://sites.google.com/view/tpa-net.
VRGym: A Virtual Testbed for Physical and Interactive AI
Apr 02, 2019


We propose VRGym, a virtual reality testbed for realistic human-robot interaction. Different from existing toolkits and virtual reality environments, the VRGym emphasizes on building and training both physical and interactive agents for robotics, machine learning, and cognitive science. VRGym leverages mechanisms that can generate diverse 3D scenes with high realism through physics-based simulation. We demonstrate that VRGym is able to (i) collect human interactions and fine manipulations, (ii) accommodate various robots with a ROS bridge, (iii) support experiments for human-robot interaction, and (iv) provide toolkits for training the state-of-the-art machine learning algorithms. We hope VRGym can help to advance general-purpose robotics and machine learning agents, as well as assisting human studies in the field of cognitive science.