 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDigiData: Training and Evaluating General-Purpose Mobile Control Agents
Nov 11, 2025AI agents capable of controlling user interfaces have the potential to transform human interaction with digital devices. To accelerate this transformation, two fundamental building blocks are essential: high-quality datasets that enable agents to achieve complex and human-relevant goals, and robust evaluation methods that allow researchers and practitioners to rapidly enhance agent performance. In this paper, we introduce DigiData, a large-scale, high-quality, diverse, multi-modal dataset designed for training mobile control agents. Unlike existing datasets, which derive goals from unstructured interactions, DigiData is meticulously constructed through comprehensive exploration of app features, resulting in greater diversity and higher goal complexity. Additionally, we present DigiData-Bench, a benchmark for evaluating mobile control agents on real-world complex tasks. We demonstrate that the commonly used step-accuracy metric falls short in reliably assessing mobile control agents and, to address this, we propose dynamic evaluation protocols and AI-powered evaluations as rigorous alternatives for agent assessment. Our contributions aim to significantly advance the development of mobile control agents, paving the way for more intuitive and effective human-device interactions.
Accelerating scientific discovery with the common task framework
Nov 06, 2025Machine learning (ML) and artificial intelligence (AI) algorithms are transforming and empowering the characterization and control of dynamic systems in the engineering, physical, and biological sciences. These emerging modeling paradigms require comparative metrics to evaluate a diverse set of scientific objectives, including forecasting, state reconstruction, generalization, and control, while also considering limited data scenarios and noisy measurements. We introduce a common task framework (CTF) for science and engineering, which features a growing collection of challenge data sets with a diverse set of practical and common objectives. The CTF is a critically enabling technology that has contributed to the rapid advance of ML/AI algorithms in traditional applications such as speech recognition, language processing, and computer vision. There is a critical need for the objective metrics of a CTF to compare the diverse algorithms being rapidly developed and deployed in practice today across science and engineering.
Benchmarking Egocentric Multimodal Goal Inference for Assistive Wearable Agents
Oct 25, 2025There has been a surge of interest in assistive wearable agents: agents embodied in wearable form factors (e.g., smart glasses) who take assistive actions toward a user's goal/query (e.g. "Where did I leave my keys?"). In this work, we consider the important complementary problem of inferring that goal from multi-modal contextual observations. Solving this "goal inference" problem holds the promise of eliminating the effort needed to interact with such an agent. This work focuses on creating WAGIBench, a strong benchmark to measure progress in solving this problem using vision-language models (VLMs). Given the limited prior work in this area, we collected a novel dataset comprising 29 hours of multimodal data from 348 participants across 3,477 recordings, featuring ground-truth goals alongside accompanying visual, audio, digital, and longitudinal contextual observations. We validate that human performance exceeds model performance, achieving 93% multiple-choice accuracy compared with 84% for the best-performing VLM. Generative benchmark results that evaluate several families of modern vision-language models show that larger models perform significantly better on the task, yet remain far from practical usefulness, as they produce relevant goals only 55% of the time. Through a modality ablation, we show that models benefit from extra information in relevant modalities with minimal performance degradation from irrelevant modalities.
Accelerating Look-ahead in Bayesian Optimization: Multilevel Monte Carlo is All you Need
Feb 03, 2024We leverage multilevel Monte Carlo (MLMC) to improve the performance of multi-step look-ahead Bayesian optimization (BO) methods that involve nested expectations and maximizations. The complexity rate of naive Monte Carlo degrades for nested operations, whereas MLMC is capable of achieving the canonical Monte Carlo convergence rate for this type of problem, independently of dimension and without any smoothness assumptions. Our theoretical study focuses on the approximation improvements for one- and two-step look-ahead acquisition functions, but, as we discuss, the approach is generalizable in various ways, including beyond the context of BO. Findings are verified numerically and the benefits of MLMC for BO are illustrated on several benchmark examples. Code is available here https://github.com/Shangda-Yang/MLMCBO.
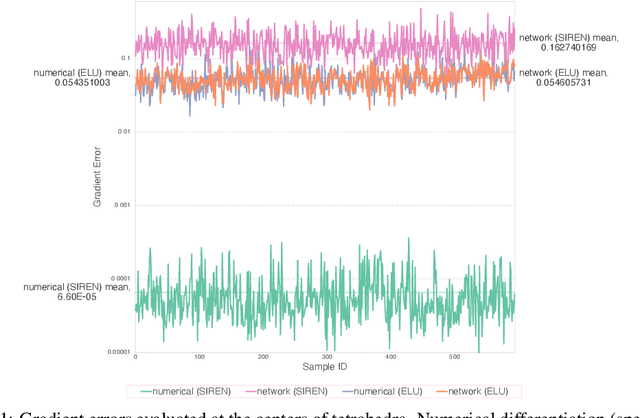
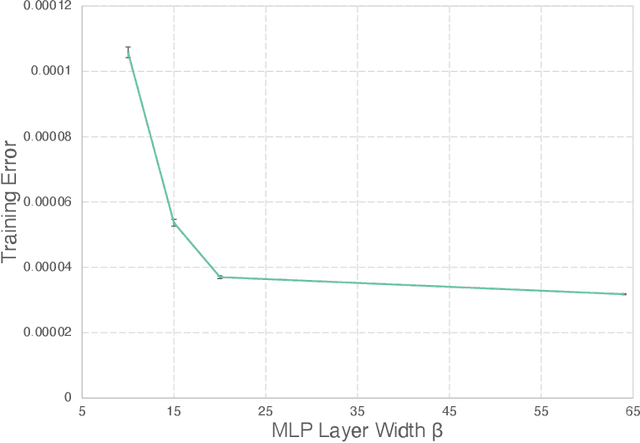
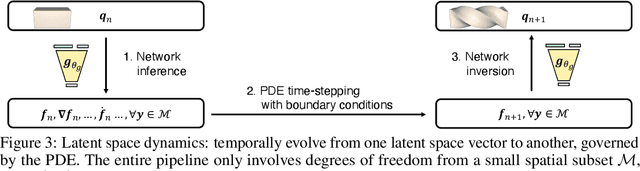
Neural Stress Fields for Reduced-order Elastoplasticity and Fracture
Oct 26, 2023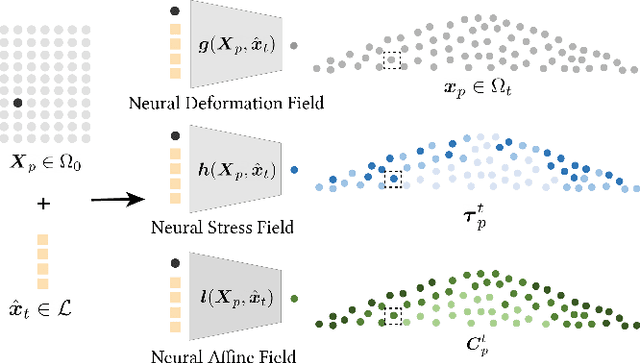
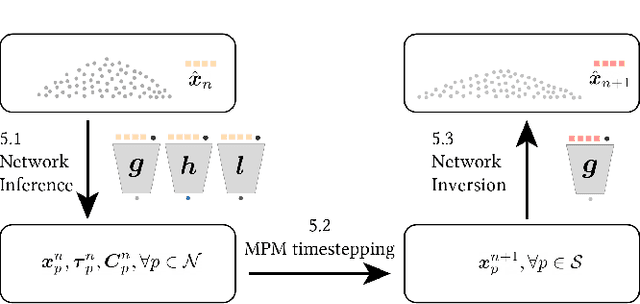
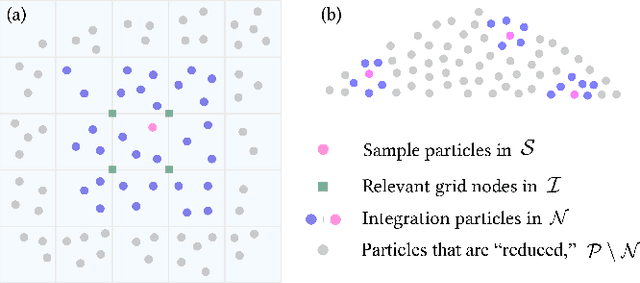
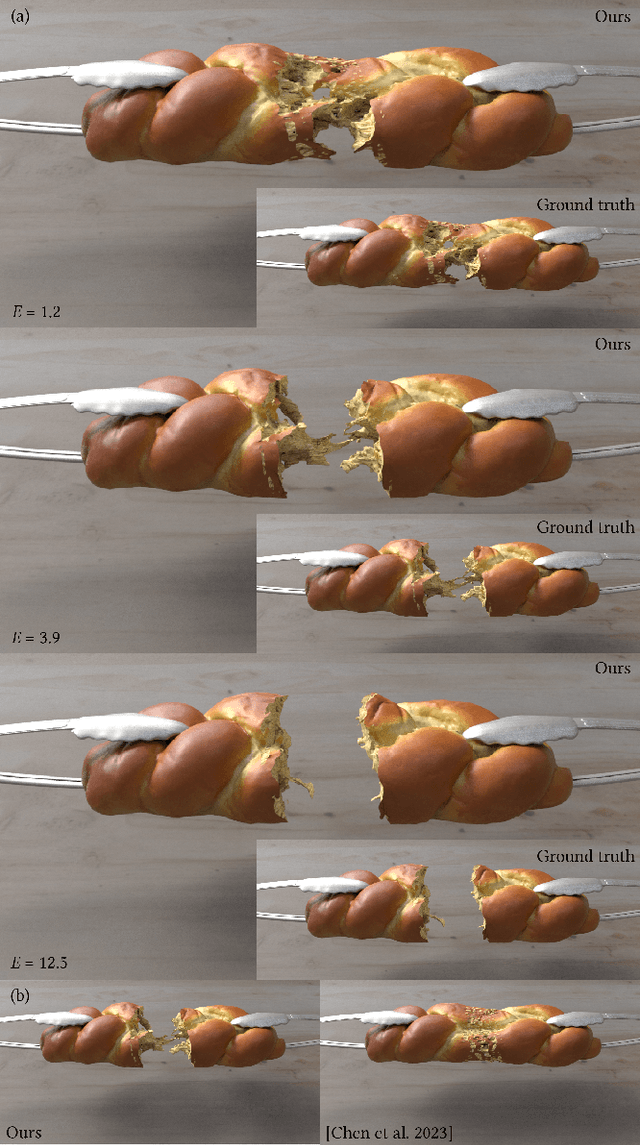
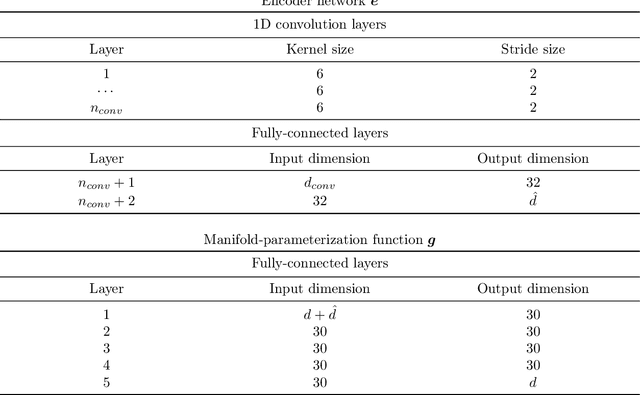
We propose a hybrid neural network and physics framework for reduced-order modeling of elastoplasticity and fracture. State-of-the-art scientific computing models like the Material Point Method (MPM) faithfully simulate large-deformation elastoplasticity and fracture mechanics. However, their long runtime and large memory consumption render them unsuitable for applications constrained by computation time and memory usage, e.g., virtual reality. To overcome these barriers, we propose a reduced-order framework. Our key innovation is training a low-dimensional manifold for the Kirchhoff stress field via an implicit neural representation. This low-dimensional neural stress field (NSF) enables efficient evaluations of stress values and, correspondingly, internal forces at arbitrary spatial locations. In addition, we also train neural deformation and affine fields to build low-dimensional manifolds for the deformation and affine momentum fields. These neural stress, deformation, and affine fields share the same low-dimensional latent space, which uniquely embeds the high-dimensional simulation state. After training, we run new simulations by evolving in this single latent space, which drastically reduces the computation time and memory consumption. Our general continuum-mechanics-based reduced-order framework is applicable to any phenomena governed by the elastodynamics equation. To showcase the versatility of our framework, we simulate a wide range of material behaviors, including elastica, sand, metal, non-Newtonian fluids, fracture, contact, and collision. We demonstrate dimension reduction by up to 100,000X and time savings by up to 10X.
Learning a Visually Grounded Memory Assistant
Oct 07, 2022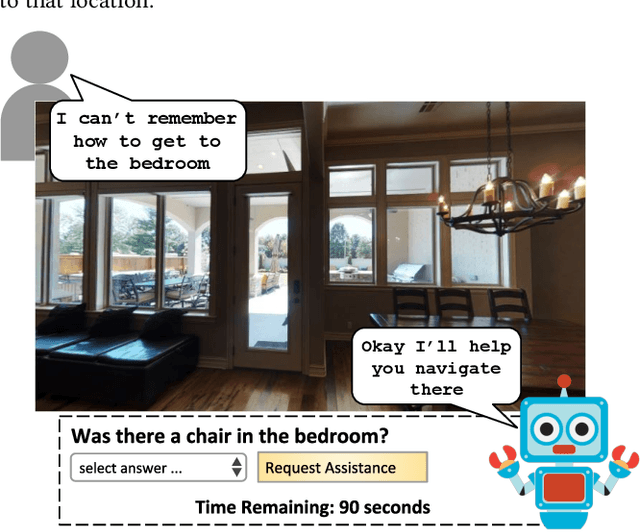

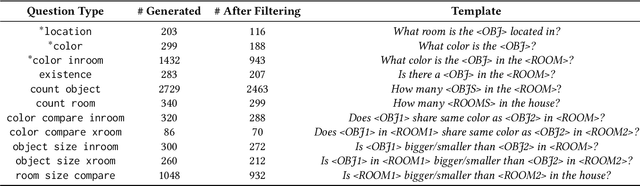
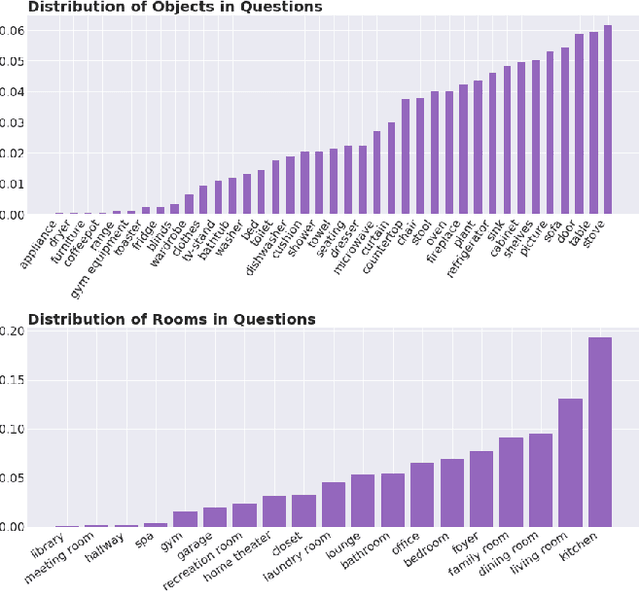
We introduce a novel interface for large scale collection of human memory and assistance. Using the 3D Matterport simulator we create a realistic indoor environments in which we have people perform specific embodied memory tasks that mimic household daily activities. This interface was then deployed on Amazon Mechanical Turk allowing us to test and record human memory, navigation and needs for assistance at a large scale that was previously impossible. Using the interface we collect the `The Visually Grounded Memory Assistant Dataset' which is aimed at developing our understanding of (1) the information people encode during navigation of 3D environments and (2) conditions under which people ask for memory assistance. Additionally we experiment with with predicting when people will ask for assistance using models trained on hand-selected visual and semantic features. This provides an opportunity to build stronger ties between the machine-learning and cognitive-science communities through learned models of human perception, memory, and cognition.
CROM: Continuous Reduced-Order Modeling of PDEs Using Implicit Neural Representations
Jun 06, 2022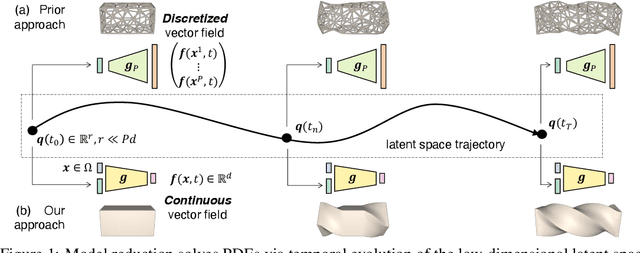
The excessive runtime of high-fidelity partial differential equation (PDE) solvers makes them unsuitable for time-critical applications. We propose to accelerate PDE solvers using reduced-order modeling (ROM). Whereas prior ROM approaches reduce the dimensionality of discretized vector fields, our continuous reduced-order modeling (CROM) approach builds a smooth, low-dimensional manifold of the continuous vector fields themselves, not their discretization. We represent this reduced manifold using neural fields, relying on their continuous and differentiable nature to efficiently solve the PDEs. CROM may train on any and all available numerical solutions of the continuous system, even when they are obtained using diverse methods or discretizations. After the low-dimensional manifolds are built, solving PDEs requires significantly less computational resources. Since CROM is discretization-agnostic, CROM-based PDE solvers may optimally adapt discretization resolution over time to economize computation. We validate our approach on an extensive range of PDEs with training data from voxel grids, meshes, and point clouds. Large-scale experiments demonstrate that our approach obtains speed, memory, and accuracy advantages over prior ROM approaches while gaining 109$\times$ wall-clock speedup over full-order models on CPUs and 89$\times$ speedup on GPUs.
Model reduction for the material point method via learning the deformation map and its spatial-temporal gradients
Sep 25, 2021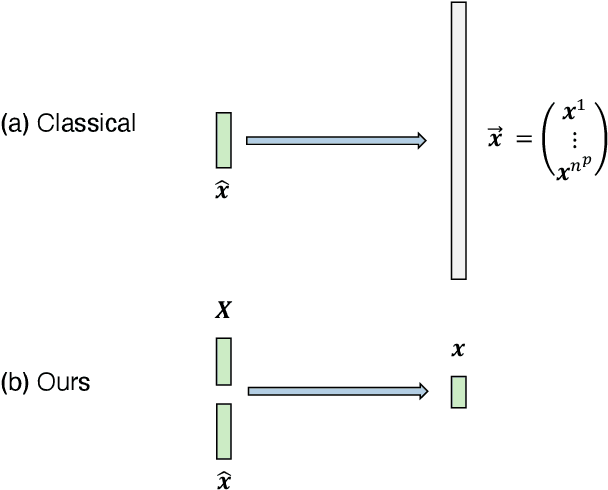
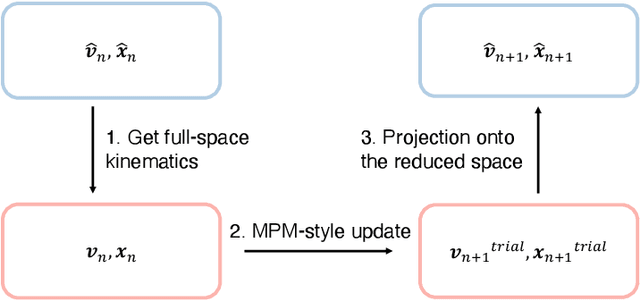

This work proposes a model-reduction approach for the material point method on nonlinear manifolds. The technique approximates the $\textit{kinematics}$ by approximating the deformation map in a manner that restricts deformation trajectories to reside on a low-dimensional manifold expressed from the extrinsic view via a parameterization function. By explicitly approximating the deformation map and its spatial-temporal gradients, the deformation gradient and the velocity can be computed simply by differentiating the associated parameterization function. Unlike classical model reduction techniques that build a subspace for a finite number of degrees of freedom, the proposed method approximates the entire deformation map with infinite degrees of freedom. Therefore, the technique supports resolution changes in the reduced simulation, attaining the challenging task of zero-shot super-resolution by generating material points unseen in the training data. The ability to generate material points also allows for adaptive quadrature rules for stress update. A family of projection methods is devised to generate $\textit{dynamics}$, i.e., at every time step, the methods perform three steps: (1) generate quadratures in the full space from the reduced space, (2) compute position and velocity updates in the full space, and (3) perform a least-squares projection of the updated position and velocity onto the low-dimensional manifold and its tangent space. Computational speedup is achieved via hyper-reduction, i.e., only a subset of the original material points are needed for dynamics update. Large-scale numerical examples with millions of material points illustrate the method's ability to gain an order-of-magnitude computational-cost saving -- indeed $\textit{real-time simulations}$ in some cases -- with negligible errors.
Optimal Assistance for Object-Rearrangement Tasks in Augmented Reality
Oct 14, 2020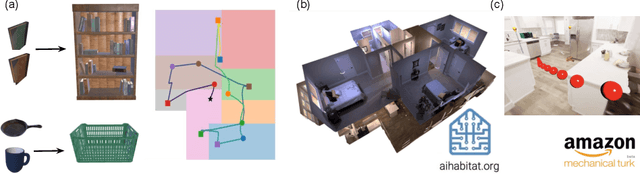
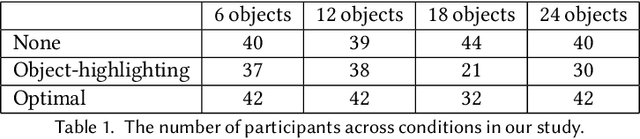
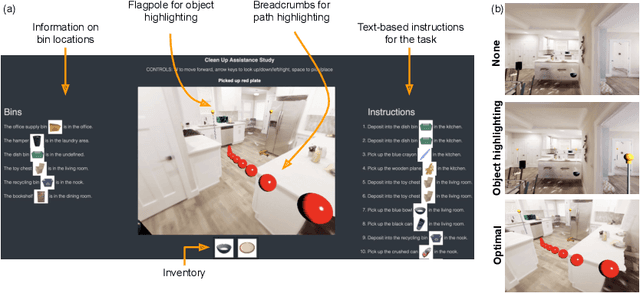

Augmented-reality (AR) glasses that will have access to onboard sensors and an ability to display relevant information to the user present an opportunity to provide user assistance in quotidian tasks. Many such tasks can be characterized as object-rearrangement tasks. We introduce a novel framework for computing and displaying AR assistance that consists of (1) associating an optimal action sequence with the policy of an embodied agent and (2) presenting this sequence to the user as suggestions in the AR system's heads-up display. The embodied agent comprises a "hybrid" between the AR system and the user, with the AR system's observation space (i.e., sensors) and the user's action space (i.e., task-execution actions); its policy is learned by minimizing the task-completion time. In this initial study, we assume that the AR system's observations include the environment's map and localization of the objects and the user. These choices allow us to formalize the problem of computing AR assistance for any object-rearrangement task as a planning problem, specifically as a capacitated vehicle-routing problem. Further, we introduce a novel AR simulator that can enable web-based evaluation of AR-like assistance and associated at-scale data collection via the Habitat simulator for embodied artificial intelligence. Finally, we perform a study that evaluates user response to the proposed form of AR assistance on a specific quotidian object-rearrangement task, house cleaning, using our proposed AR simulator on mechanical turk. In particular, we study the effect of the proposed AR assistance on users' task performance and sense of agency over a range of task difficulties. Our results indicate that providing users with such assistance improves their overall performance and while users report a negative impact to their agency, they may still prefer the proposed assistance to having no assistance at all.
The ROMES method for statistical modeling of reduced-order-model error
Dec 10, 2014



This work presents a technique for statistically modeling errors introduced by reduced-order models. The method employs Gaussian-process regression to construct a mapping from a small number of computationally inexpensive `error indicators' to a distribution over the true error. The variance of this distribution can be interpreted as the (epistemic) uncertainty introduced by the reduced-order model. To model normed errors, the method employs existing rigorous error bounds and residual norms as indicators; numerical experiments show that the method leads to a near-optimal expected effectivity in contrast to typical error bounds. To model errors in general outputs, the method uses dual-weighted residuals---which are amenable to uncertainty control---as indicators. Experiments illustrate that correcting the reduced-order-model output with this surrogate can improve prediction accuracy by an order of magnitude; this contrasts with existing `multifidelity correction' approaches, which often fail for reduced-order models and suffer from the curse of dimensionality. The proposed error surrogates also lead to a notion of `probabilistic rigor', i.e., the surrogate bounds the error with specified probability.